1.本技术涉及安防设备的领域,尤其是涉及一种智能巡查机器人。
背景技术:
2.目前,现有的巡查机器人应用场景较为广泛,其中也包括用在餐饮行业,餐厅内均设有用于送餐的巡查机器人,巡查机器人包括人工智能送餐车和保温箱,保温箱与人工智能送餐车固定连接,餐厅工作人员将顾客所点的餐品放置在保温箱内,再由人工智能送餐车将餐品送至顾客所在位置;为防止外界气温较低时,餐品温度降低而影响口感,保温箱内均设有用于给餐品加热的加热丝;
3.由于保持餐品口感的温度适当即可,但现有的巡查机器人在运输餐品过程中,加热丝处于一直工作状态,使得保温箱内的温度一直升高,进而浪费电力资源。
技术实现要素:
4.为了使巡查机器人的保温箱保持适当温度,进而节约电力资源,本技术提供一种智能巡查机器人。
5.本技术提供的一种智能巡查机器人采用如下的技术方案:
6.一种智能巡查机器人,包括送餐车本体和恒温箱,所述恒温箱固定于所述送餐车本体上,且所述恒温箱顶部设有开口,所述恒温箱的开口处转动连接有挡板,所述挡板的一端与所述恒温箱开口处铰接,所述挡板的另一端固定有把手;所述恒温箱内部设有加热组件,所述加热组件为加热丝,所述加热丝耦接有恒温电路,所述恒温电路用于控制所述加热丝得失电,所述恒温电路内部设有基准值,当所述恒温箱内部温度小于基准值时所述加热丝得电。
7.通过采用上述技术方案,在需要送餐时,工作人员通过把手打开挡板,将餐品放入恒温箱内部后关上挡板,恒温箱内部的恒温电路控制加热丝得失电;当温度较高时,温度大于基准值,加热丝失电;当温度较低时,温度小于基准值,加热丝得电加热;当餐品运输至目标位置时,顾客通过把手打开挡板将餐品取出;进而在运输餐品的过程中保持恒温箱内部温度恒定,在不影响餐品口感的条件下,节约电力资源。
8.可选的,所述恒温电路包括检测模块、比较模块、振荡模块、控制模块和开关模块;所述检测模块用于检测加热箱内部温度并输出检测信号,所述检测模块与所述比较模块耦接;所述比较模块内部设有基准值,所述比较模块用于接收检测信号并与基准值比较,所述比较模块用于输出比较信号,所述比较模块与所述振荡模块耦接;所述振荡模块用于接收比较信号并输出振荡信号,所述振荡模块与所述控制模块耦接;所述控制模块用于输出控制信号,所述控制模块与所述开关模块耦接;所述开关模块用于接收控制信号,所述开关模块在接收到控制信号后输出开关信号使得所述加热丝得电。
9.通过采用上述技术方案,当恒温箱内温度较低时,检测模块检测恒温箱内部温度并输出检测信号,当检测信号大于基准值时,比较模块输出比较信号,振荡模块在接收到比
较信号后输出振荡信号,振荡模块输出振荡信号至控制模块,控制模块输出控制信号,开关模块则输出开关信号控制加热丝得电;
10.当温度较高时,检测信号小于基准值,比较模块无比较信号输出,振荡模块无振荡信号输出,控制模块无控制信号输出,开关模块无开关信号输出,进而加热丝不得电;
11.通过采用恒温箱,当温度较低时,加热丝得电加热;当温度叫高时,加热丝不得电;进而使得恒温箱温度保持不变,达到一恒温的效果。
12.可选的,所述检测模块包括热敏电阻rt,所述热敏电阻rt的一端与所述比较模块耦接,所述热敏电阻rt的另一端接地。
13.通过采用上述技术方案,热敏电阻rt为负温度系数热敏电阻,当恒温箱内温度降低时,热敏电阻rt的电阻阻值增加,流经电流减少;当恒温箱内温度升高时,热敏电阻rt的电阻阻值降低,流经电流增加。
14.可选的,所述比较模块包括三极管q1,所述三极管q1的基极与所述热敏电阻rt耦接,所述三极管q1的基极与所述热敏电阻rt的连接节点同时耦接有可调电阻rp,所述可调电阻rp的阻值为基准值,所述可调电阻rp的另一端与电源vcc耦接,所述三极管q1的发射极接地,所述三极管q1的集电极耦接有第二电阻r2,所述第二电阻r2的另一端与所述可调电阻rp远离所述三极管q1的一端耦接,所述三极管q1的集电极与所述第二电阻r2的连接节点同时与所述振荡模块耦接。
15.通过采用上述技术方案,当热敏电阻rt因恒温箱内温度降低电阻阻值增加,流经电流减少,三极管q1与热敏电阻rt的连接节点的电压升高,三极管q1的集电极与发射极导通,三极管q1的集电极输出比较信号至振荡模块;当热敏电阻rt因恒温箱内温度升高电阻阻值减少,流经电流增大,三极管q1与热敏电阻rt的连接节点的电压降低,三极管q1的集电极与发射极截止,三极管q1无比较信号输出至振荡模块,同时用户可通过改变可调电阻rp进而改变基准值。
16.可选的,所述振荡模块包括芯片u1,所述芯片u1的第一引脚接地,所述芯片u1的第二引脚与第六引脚耦接,所述芯片u1的第七引脚耦接有第三电阻r3,所述第三电阻r3的另一端与电源vcc耦接,所述芯片u1的第七引脚与所述第三电阻r3的连接节点耦接有第四电阻r4,所述第四电阻r4的另一端与所述芯片u1的第六引脚与第二引脚的连接节点耦接,所述第四电阻r4远离所述第三电阻r3的一端串联有第一电容c1,所述第一电容c1的另一端与所述芯片u1的第一引脚耦接,所述芯片u1的第三引脚与所述控制模块耦接。
17.通过采用上述技术方案,芯片u1、第三电阻r3、第四电阻r4和第一电容c1共同组成振荡电路,芯片u1的第四引脚用于接收比较信号,当芯片u1的第四引脚接收到比较信号后,芯片u1的第三引脚输出振荡信号;当芯片u1的第四引脚未接收到比较信号,芯片u1的第三引脚无振荡信号输出。
18.可选的,所述控制模块包括芯片u2,所述芯片u2的第一引脚耦接有第三电容c3,所述第三电容c3的另一端接地,所述芯片u1的第二引脚耦接有第四电容c4,所述第四电容c4的另一端与所述第三电容c3远离所述芯片u2的一端耦接,所述芯片u2的第四引脚耦接有第五电阻r5,第五电阻r5的另一端与电源vcc耦接,所述芯片u2的第三引脚与所述芯片u1的第一引脚耦接,所述芯片u2的第五引脚耦接有第六电阻r6,所述芯片u2的第六引脚与所述第六电阻r6远离所述芯片u2的一端耦接,所述芯片u2的第七引脚与所述第三电容c3远离所述
芯片u2的一端耦接,所述芯片u2的第八引脚与所述开关模块耦接。
19.通过采用上述技术方案,当芯片u2的第三引脚未接收到振荡信号时,芯片u2的第八引脚无控制信号输出且芯片u2的第八引脚保持高电平;当芯片u2的第三引脚接收到控制信号后,芯片u2的第八引脚输出控制信号,且芯片u2的第八引脚输出低电平。
20.可选的,所述开关模块包括二极管vd和继电器ka1,所述二极管vd的阳极与所述芯片u2的第八引脚耦接,所述二极管vd的阴极与电源vcc耦接,所述二极管vd与所述芯片u2的第八引脚的连接节点与所述继电器ka1的线圈耦接,所述继电器ka1的线圈的另一端与所述二极管vd的阴极耦接;所述继电器ka1还包括常开触点开关ka1-1,所述常开触点开关ka1-1的一端与电源vcc耦接,所述常开触点开关的另一端与所述加热丝耦接已控制所述加热丝得失电,所述加热丝的另一端接地。
21.通过采用上述技术方案,芯片u2的第八引脚输出低电平的控制信号,继电器ka1的线圈导通,继电器ka1的线圈控制常开触点开关ka1-1闭合,加热丝得电,芯片u2的第八引脚保持高电平时,继电器ka1的线圈截止,继电器ka1的线圈控制常开触点开关ka1-1断开,加热丝失电;二极管vd用于整流。
22.可选的,所述恒温箱底部设有托盘,且所述托盘的一侧与所述送餐车本体固定连接,所述托盘顶部设有第一凹槽和第二凹槽。
23.通过采用上述技术方案,托盘上平面处可用于防止不需要恒温要求的餐品,托盘上第一凹槽处和第二凹槽处可用于放置杯具,进而防止杯具侧翻,增加稳定性。
24.综上所述,本技术包括以下至少一种有益技术效果:
25.1.在需要送餐时,工作人员通过把手打开挡板,将餐品放入恒温箱内部后关上挡板,恒温箱内部的恒温电路控制加热丝得失电;当温度较高时,温度大于基准值,加热丝失电;当温度较低时,温度小于基准值,加热丝得电加热;当餐品运输至目标位置时,顾客通过把手打开挡板将餐品取出;进而在运输餐品的过程中保持恒温箱内部温度恒定,在不影响餐品口感的条件下,节约电力资源;
26.2.热敏电阻rt为负温度系数热敏电阻,当恒温箱内温度降低时,热敏电阻rt的电阻阻值增加,流经电流减少;当恒温箱内温度升高时,热敏电阻rt的电阻阻值降低,流经电流增加;
27.3.当热敏电阻rt因恒温箱内温度降低电阻阻值增加,流经电流减少,三极管q1与热敏电阻rt的连接节点的电压升高,三极管q1的集电极与发射极导通,三极管q1的集电极输出比较信号至振荡模块;当热敏电阻rt因恒温箱内温度升高电阻阻值减少,流经电流增大,三极管q1与热敏电阻rt的连接节点的电压降低,三极管q1的集电极与发射极截止,三极管q1无比较信号输出至振荡模块,同时用户可通过改变可调电阻rp进而改变基准值。
附图说明
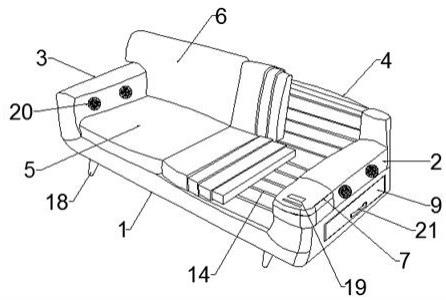
28.图1是本技术实施例一种智能巡查机器人的整体结构图。
29.图2是本技术实施例一种智能巡查机器人的恒温电路的电路图。
30.附图标记说明:1、送餐车本体;2、恒温箱;21、挡板;22、把手;3、托盘;31、第一连接杆;32、第二连接杆;33、第一凹槽;34、第二凹槽;41、检测模块;42、比较模块;43、振荡模块;44、控制模块;45、开关模块。
具体实施方式
31.以下结合附图1-2对本技术作进一步详细说明。
32.本技术实施例公开一种智能巡查机器人。
33.参照图1,一种智能巡查机器人包括送餐车本体1和用于承载食物的载物组件,载物组件固定于送餐车本体1外壁上;载物组件包括恒温箱2和托盘3,恒温箱2位于托盘3上方,且恒温箱2和托盘3均呈水平设置;恒温箱2的一端与送餐车本体1的外壁固定连接,恒温箱2顶部设有开口,恒温箱2的开口处转动连接有挡板21,挡板21靠近送餐车本体1的一端与恒温箱2铰接,挡板21用于密封恒温箱2以保温,挡板21远离送餐车本体1的一端固定有把手22,把手22用于抬高挡板21远离送餐车本体1的一端从而打开恒温箱2;
34.恒温箱2的一侧固定连接有第一连接杆31,恒温箱2远离第一连接杆31的一侧固定连接有第二连接杆32,第一连接杆31和第二连接杆32长度相同且相互平行,且第一连接杆31的长度方向和第二连接杆32的长度方向均垂直于水方向,第一连接杆31远离恒温箱2的一端固定连接有托盘3,托盘3的一侧与第一连接杆31固定连接,托盘3远离第一连接杆31的一侧与第二连接杆32远离恒温箱2的一端固定连接,托盘3呈水平设置,且托盘3靠近送餐车本体1的一侧与送餐车本体1固定连接,托盘3顶部靠近第一连接杆31的一端凹陷有第一凹槽33和第二凹槽34,第一凹槽33和第二凹槽34均呈圆形凹陷。
35.恒温箱2内部设有加热组件,加热组件为加热丝,加热丝用于给恒温箱2内部空间加热,进而保持食物温度,加热丝耦接有恒温电路。
36.参照图2,恒温电路包括检测模块41、比较模块42、振荡模块43、控制模块44和开关模块45;检测模块41用于检测加热箱内部温度并输出检测信号,检测模块41包括负温度系数热敏电阻rt,热敏电阻rt的一端与比较模块42耦接以输出检测信号,热敏电阻rt的另一端接地;
37.比较模块42包括三极管q1,三极管q1的基极与热敏电阻rt耦接以接收检测信号,三极管q1的基极与热敏电阻rt的连接节点耦接有可调电阻rp,可调电阻rp的另一端与电源vcc耦接,可调电阻rp的电阻阻值为基准值,三极管q1的发射极接与热敏电阻rt远离三极管q1的一端耦接,三极管q1的集电极耦接有第二电阻r2,第二电阻r2的另一端与可调电阻rp远离三极管q1的一端耦接,三极管q1的集电极同时与振荡模块43耦接以输出比较信号;
38.振荡模块43包括型号为ne555的芯片u1,芯片u1包括八个引脚,芯片u1的第四引脚与三极管q1的集电极耦接以接收比较信号,芯片u1的第七引脚耦接有第三电阻r3,第三电阻r3的另一端与第二电阻r2和第一电阻r1的连接节点耦接,芯片u1的第七引脚同时耦接有第四电阻r4,第四电阻r4的另一端耦接有第一电容c1,第一电容c1的另一端与三极管q1的集电极耦接;
39.芯片u1的第六引脚和第二引脚耦接,芯片u1的第六引脚和第二引脚的连接节点与第四电阻r4远离第三电阻r3的一端耦接,芯片u1的第一引脚与第一电容c1远离第四电阻r4的一端耦接,芯片u1的第八引脚与第三电阻r3远离第四电阻r4的一端耦接,芯片u1的第三引脚与控制模块44耦接以输出振荡信号;
40.控制模块44包括型号为lm567的芯片u2,芯片u2包括八个引脚,芯片u2的第三引脚与芯片u1的第三引脚耦接以接收振荡信号,芯片u2的第七引脚接地,芯片u2的第一引脚耦接有第三电容c3,第三电容c3的另一端与芯片u2的第七引脚耦接以共地,芯片u2的第二引
脚耦接有第四电容c4,第四电容c4的另一端与第三电容c3远离芯片u2的一端耦接,芯片u2的第四引脚与芯片u1的第八引脚耦接,芯片u2的第四引脚耦接有第五电阻r5,第五电阻r5的另一端与电源vcc耦接,芯片u2的第五引脚耦接有第六电阻r6,第六电阻r6的另一端与芯片u2的第六引脚耦接,芯片u2的第六引脚与第六电阻r6的连接节点耦接有第二电容c2,第二电容c2的另一端与芯片u1的第一引脚耦接;
41.开关模块45包括继电器ka1,继电器ka1的线圈的一端与电源vcc耦接,继电器ka1的线圈的另一端与芯片u2的第八引脚耦接以接收控制信号,继电器ka1的线圈与芯片u2的第八引脚的连接节点耦接有整流二极管vd,二极管vd的阳极与芯片u2的第八引脚耦接,二极管vd的阴极与继电器ka1的线圈远离芯片u2的一端耦接;继电器ka1包括常开触点开关ka1-1,常开触点开关的一端与电源vcc耦接,常开触点开关ka1-1的另一端与加热丝耦接以输出开关信号控制加热丝得电。
42.本技术实施例一种智能巡查机器人的实施原理为:餐厅服务人员通过把手22打开恒温箱2,将所需要保持恒温的餐品放置恒温箱2内,将不需要保持恒温的餐品放置在托盘3上,将杯具放置在第一凹槽33和第二凹槽34内;送餐车将餐品送至顾客所在位置过程中,恒温电路工作,热敏电阻rt检测恒温箱2内部温度以输出检测信号,检测信号与基准值比较,当恒温箱2颞部温度降低时,热敏电阻rt的电阻阻值增加,流经电流减少,三极管q1的基极与热敏电阻rp的连接节点的电压增加,三极管q1的集电极与发射极导通并输出比较信号;
43.芯片u1的第四引脚接收到比较信号,芯片u1的第三引脚输出振荡信号,芯片u2的第三引脚接收到振荡信号后,芯片u2的第八引脚由高电平转变为低电平,芯片u2的第八引脚导通,继电器ka1的线圈得电,常开触点开关ka1-1闭合并输出开关信号,加热丝得电开始给恒温箱2加热;
44.当恒温箱2内部温度升高后,热敏电阻rp的电阻阻值减少,流经电流减少三极管q1的基极与热敏电阻rt的连接节点电压减少,三极管q1的集电极与发射极截止,无比较信号输出,芯片u1的第三引脚无振荡信号输出,芯片u2的第八引脚无控制信号输出,芯片u2的第八引脚由低电平转变为高电平,继电器ka1的线圈失电,常开触点开关ka1-1断开,加热丝失电停止加热;
45.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。