1.本实用新型涉及农业机械技术领域,特别是一种采摘机器人。
背景技术:
2.目前我国蘑菇工厂化生产正处于迅速发展的阶段,床架式栽培方法成为多种蘑菇(如双孢菇、褐菇等)的主要生产模式。在蘑菇生产过程中,采摘环节工作量大,目前仍然依赖大量人工来完成。人工采摘存在成本高、效率低、作业标准不统一等问题。随着农业劳动力短缺、劳动力成本上涨和城乡居民对蘑菇品质要求升高等问题的加剧,研究适用于工厂化立体种植的蘑菇机械化采收装置,已经成为蘑菇生产发展的现实需求。
技术实现要素:
3.本部分的目的在于概述本实用新型的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
4.鉴于上述和/或现有的蘑菇等菌菇采摘中存在的问题,提出了本实用新型。
5.因此,本实用新型的目的是提供一种采摘机器人,其能实现菌菇的采摘,并能将采摘后的菌菇输送出去,降低劳动力。
6.为解决上述技术问题,本实用新型提供如下技术方案:一种采摘机器人,其包括,
7.行走组件,所述行走组件包括行走架,所述行走架的下部排布有若干可转动的滚轮,所述行走架上方连接有第一采摘支撑梁和第二采摘支撑梁,所述第一采摘支撑梁和第二采摘支撑梁之间可移动地连接有采摘横梁;
8.采摘连接组件,所述采摘连接组件包括可滑动地连接在采摘横梁上的固定座,所述固定座上连接有能升降的移动座,所述移动座上连接有至少一个采摘组件;
9.输送组件,所述输送组件包括固定连接在行走架上的第一输送连接板和第二输送连接板,所述第一输送连接板和第二输送连接板之间可转动地连接有主动输送轮和从动输送轮,所述主动输送轮经输送带与从动输送轮连接,所述采摘组件能移动至输送带上方,所述行走架上开有输送口,输送带末端朝着输送口所在方向延伸。
10.作为本实用新型所述采摘机器人的一种优选方案,其中:所述采摘组件包括固定连接在移动座上侧的转动电机,所述转动电机上连接有向下伸出移动座下方的输出轴,所述输出轴上连接有中间连接支架,所述中间连接支架的下侧排布有若干固定导向杆,所述固定导向杆的下侧固定有电机座,所述电机座上侧固定连接有夹持电机,所述夹持电机上连接有向上伸出的传动丝杠,所述传动丝杠上螺纹连接有升降板,所述升降板上排布有若干导向孔,所述升降板经导向孔沿着固定导向杆上下移动,所述升降板的外周铰接有若干传动杆,所述传动杆向下伸出的一端铰接有夹爪,所述固定导向杆的下部和夹爪上部远离传动杆的一端铰接。
11.作为本实用新型所述采摘机器人的一种优选方案,其中:所述第一采摘支撑梁和第二采摘支撑梁上连接有带动采摘横梁移动的移动组件。
12.作为本实用新型所述采摘机器人的一种优选方案,其中:所述移动组件包括可转动地连接在第一采摘支撑梁两端的第一主动轮和第一从动轮,所述第一主动轮将第一传动带与第一从动轮连接,所述第一采摘支撑梁上可滑动地连接有第一支撑座,所述第一支撑座与上面的第一传动带固定连接,所述第二采摘支撑梁的两端分别可转动地连接有第二主动轮和第二从动轮,所述第二主动轮经第二传动带与第二从动轮连接,所述第二采摘支撑梁上可滑动地连接有第二支撑座,所述第二支撑座与上面的第二传动带连接,所述采摘横梁固定在第一支撑座和第二支撑座上。
13.作为本实用新型所述采摘机器人的一种优选方案,其中:所述行走架上固定连接有第一传动箱,第一传动箱上固定连接有移动电机,所述第一采摘支撑梁和第二采摘支撑梁上可转动地连接有转接轴,所述第一主动轮和第二主动轮分别连接在转接轴的两端,所述移动电机与转接轴传动连接。
14.作为本实用新型所述采摘机器人的一种优选方案,其中:所述采摘横梁的两端分别可转动地连接有传动轮和转动轮,所述传动轮经移动带与转动轮连接,所述固定座与移动带固定连接。
15.作为本实用新型所述采摘机器人的一种优选方案,其中:所述第一支撑座上侧固定有第二传动箱,所述第二传动箱上固定连接有传动电机,所述传动电机与传动轮传动连接。
16.作为本实用新型所述采摘机器人的一种优选方案,其中:所述行走架上固定有输送电机,所述输送电机与主动输送轮连接。
17.作为本实用新型所述采摘机器人的一种优选方案,其中:所述固定座上侧固定连接有升降电机,所述升降电机上连接有升降丝杠,所述升降丝杠与移动座螺纹连接。
18.作为本实用新型所述采摘机器人的一种优选方案,其中:所述升降丝杠两端朝外的固定座上连接有两个限转导向杆,所述移动座能刚好沿着限转导向杆上下滑动。
19.本实用新型的有益效果:本实用新型通过可升降的采摘组件采摘菌菇,采摘组件移动至输送带上方,下降采摘组件,采摘组件下降至合适的高度时,采摘组件停止下降,采摘组件松开菌菇,菌菇落到输送带上,实现菌菇的采摘,全部采摘结束,在输送口所在位置放置回收箱,输送带转动,输送带将菌菇移送至回收箱内,实现菌菇的自动回收,使用本实用新型能实现菌菇的采摘输送回收,降低劳动力。
附图说明
20.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
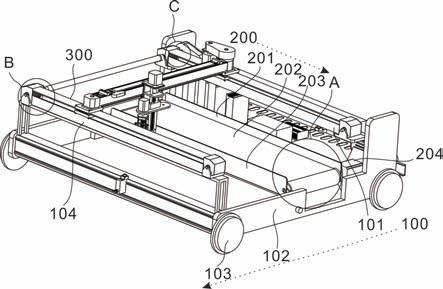
21.图1为本实用新型的立体结构图一
22.图2为图1中a处的局部放大图。
23.图3为图1中b处的局部放大图。
24.图4为图1中c处的局部放大图。
25.图5为本实用新型的立体结构图二。
26.图6为图5中d处的局部放大图。
27.图7为图5中e处的局部放大图。
28.图8为图5中f处的局部放大图。
29.图9为图5中g处的局部放大图。
30.图10为本实用新型的立体结构图三。
31.图11为图10中h处的局部放大图。
32.图12为图10中i处的局部放大图。
33.图中,100行走组件,101第一采摘支撑梁,102行走架,102a输送口,103滚轮,104第二采摘支撑梁,105采摘横梁,200输送组件,201第一输送连接板,202输送带,203第二输送连接板,204输送电机,205主动输送轮,300移动组件,301第二主动轮,302第二传动带,303第一主动轮,304第一传动箱,305第一传动带,306转接轴,307移动电机,308移动带,309第一支撑座,310传动电机,311第二传动箱,312传动轮,313第一从动轮,314第二从动轮,315转动轮,316第二支撑座,400采摘连接组件,401升降电机,402固定座,403移动座,404升降丝杠,405限转导向杆,500采摘组件,501固定导向杆,502夹持电机,503电机座,504夹爪,505传动杆,506升降板,507中间连接支架,508输出轴,509转动电机。
具体实施方式
34.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本实用新型的具体实施方式做详细的说明。
35.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是本实用新型还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似推广,因此本实用新型不受下面公开的具体实施例的限制。
36.其次,此处所称的“一个实施例”或“实施例”是指可包含于本实用新型至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
37.实施例1
38.参照图1~图9和图11,为本实用新型的第一个实施例,该实施例提供了一种采摘机器人,其能实现菌菇的采摘输送回收,降低劳动力。
39.一种采摘机器人,其包括行走组件100,行走组件100包括行走架102,行走架102的下部排布有若干可转动的滚轮103,行走架102上方连接有第一采摘支撑梁101和第二采摘支撑梁104,第一采摘支撑梁101和第二采摘支撑梁104之间可移动地连接有采摘横梁105;
40.采摘连接组件400,采摘连接组件400包括可滑动地连接在采摘横梁105上的固定座402,固定座402上连接有能升降的移动座403,移动座403上连接有至少一个采摘组件500;
41.输送组件200,输送组件200包括固定连接在行走架102上的第一输送连接板201和第二输送连接板203,第一输送连接板201和第二输送连接板203之间可转动地连接有主动输送轮205和从动输送轮,主动输送轮205经输送带202与从动输送轮连接,采摘组件500能
移动至输送带202上方,行走架102上开有输送口102a,输送带202末端朝着输送口102a所在方向延伸,行走架102上固定有输送电机204,输送电机204与主动输送轮205连接。
42.进一步的,第一采摘支撑梁101和第二采摘支撑梁104上连接有带动采摘横梁105移动的移动组件300,移动组件300包括可转动地连接在第一采摘支撑梁101两端的第一主动轮303和第一从动轮313,第一主动轮303将第一传动带305与第一从动轮313连接,第一采摘支撑梁101上可滑动地连接有第一支撑座309,第一支撑座309与上面的第一传动带305固定连接,第二采摘支撑梁104的两端分别可转动地连接有第二主动轮301和第二从动轮314,第二主动轮301经第二传动带302与第二从动轮314连接,第二采摘支撑梁104上可滑动地连接有第二支撑座316,第二支撑座316与上面的第二传动带302连接,采摘横梁105固定在第一支撑座309和第二支撑座316上,行走架102上固定连接有第一传动箱304,第一传动箱304上固定连接有移动电机307,第一采摘支撑梁101和第二采摘支撑梁104上可转动地连接有转接轴306,第一主动轮303和第二主动轮301分别连接在转接轴306的两端,第一传动箱304为现有技术,第一传动箱304内部的传动结构未给出,移动电机307经第一传动箱304与转接轴306连接。
43.进一步的,采摘横梁105的两端分别可转动地连接有传动轮312和转动轮315,传动轮312经移动带308与转动轮315连接,固定座402与移动带308固定连接,第一支撑座309上侧固定有第二传动箱311,第二传动箱311上固定连接有传动电机310,第二传动箱311内部的传动结构为现有技术,传动电机310经第二传动箱311与传动轮312传动连接。
44.实现支撑横梁移动的动作过程为,移动电机307动作,移动电机307经第一传动箱304带动转接轴306转动,转接轴306带动第一主动轮303和第二主动轮301转动,第一主动轮303经第一传动带305带动第一从动轮313转动,第二主动轮301经第二传动带302带动第二从动轮314转动,第一传动带305和第二传动带302同步带动第一支撑座309和第二支撑座316分别沿着第一采摘支撑梁101和第二采摘支撑梁104滑动,传动电机310动作,传动轮312转动,传动轮312经移动带308带动转动轮315转动,移动带308带动固定座402移动,当采摘组件500刚好移动至有菌菇的位置时,传动电机310停止动作,采摘组件500降下,采摘组件500动作,抓取菌菇。
45.进一步的,固定座402上侧固定连接有升降电机401,升降电机401上连接有升降丝杠404,升降丝杠404与移动座403螺纹连接,升降丝杠404两端朝外的固定座402上连接有两个限转导向杆405,移动座403能刚好沿着限转导向杆405上下滑动。
46.实施时,在升降丝杠404两端朝外的移动座403上分别安装采摘组件500;实现采摘组件500升降的动作过程为,升降电机401动作,升降丝杠404转动,升降丝杠404带动移动座403移动,移动座403带动采摘组件500移动,当采摘组件500移动至需要的高度时,升降电机401停止动作。
47.实现行走组件100自动行驶的结构为现有技术,本技术中未具体阐述;本实用新型通过可升降的采摘组件500采摘菌菇,采摘组件500移动至输送带202上方,下降采摘组件500,采摘组件500下降至合适的高度时,采摘组件500停止下降,采摘组件500松开菌菇,菌菇落到输送带202上,实现菌菇的采摘,全部采摘结束,在输送口102a所在位置放置回收箱,输送带202转动,输送带202将菌菇移送至回收箱内,实现菌菇的自动回收,使用本实用新型能实现菌菇的采摘输送回收,降低劳动力。
48.实施例2
49.参照图10和图12,为本实用新型的第二个实施例,与实施例1的不同之处在于,其能实现菌菇的自动抓取。
50.一种采摘机器人,其中,采摘组件500包括固定连接在移动座403上侧的转动电机509,转动电机509上连接有向下伸出移动座403下方的输出轴508,输出轴508上连接有中间连接支架507,中间连接支架507的下侧排布有若干固定导向杆501,固定导向杆501的下侧固定有电机座503,电机座503上侧固定连接有夹持电机502,夹持电机502上连接有向上伸出的传动丝杠,传动丝杠上螺纹连接有升降板506,升降板506上排布有若干导向孔,升降板506经导向孔沿着固定导向杆501上下移动,升降板506的外周铰接有若干传动杆505,传动杆505向下伸出的一端铰接有夹爪504,固定导向杆501的下部和夹爪504上部远离传动杆505的一端铰接。
51.初始状态下,若干夹爪504呈张开状态;采摘组件500移动至菌菇所在位置时,夹持电机502动作,传动丝杠转动,升降板506在高度方向上移动,升降板506带动传动杆505移动,传动杆505带动夹爪504摆动,传动杆505上移时,夹爪504张开,传动杆505下移时,夹爪504合拢,夹爪504合拢时实现菌菇的夹持,转动电机509动作,输出轴508转动,输出轴508带动中间连接支架507转动,中间连接支架507经固定导向杆501带动电机座503和升降板506同步转动,夹爪504夹着菌菇转动,菌菇脱离菇床,转动电机509停止动作,实现菌菇的采摘,适用于杏鲍菇等菌菇的采摘工作中。
52.应说明的是,以上实施例所说的左右方向为平行于的固定平台的长度方向,左右方向与前后方向垂直,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围,其均应涵盖在本实用新型的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。