1.本实用新型属于飞行器技术领域,具体涉及一种纵横结构可倾转旋翼的飞行器。
背景技术:
2.本部分的陈述仅仅是提供了与本实用新型相关的背景技术信息,不必然构成在先技术。
3.新的时代对于飞行器提出了新的需求,即垂直起降、高速飞行和大航程以及良好的机动性。
4.当前的电动多旋翼飞行器的旋翼都不能倾转,有的是电机轴始终垂直向上,由对向两个电机的转速差产生扭转力矩实现转弯等机动动作,靠前后旋翼组的转速差使机体向前倾斜产生升力和拉力二分力向前飞行;还有一种预设扭转角协助转弯等机动动作,扭转角始终存在转弯时确实能提升效率,但是在直飞时动力上始终有损失。
技术实现要素:
5.本实用新型为了解决上述问题,提出了一种纵横结构可倾转旋翼的飞行器,能够极大地提高多旋翼飞行器的机动性而不损失动力。
6.根据一些实施例,本实用新型采用如下技术方案:
7.一种纵横结构可倾转旋翼的飞行器,包括由多个支撑杆组成的井字形机架;
8.所述支撑杆位于所述井字形机架外侧的端部设置有旋翼组件,且所述旋翼组件可绕支撑杆的轴线倾转。
9.进一步的,所述多个支撑杆为两个横向支撑杆和两个纵向支撑杆;
10.两个横向支撑杆长度相等且相互平行,每个横向支撑杆通过两个轴承安装在底板上;
11.两个纵向支撑杆长度相等且相互平行,每个纵向支撑杆通过两个轴承安装在底板上。
12.进一步的,所述两个横向支撑杆上均固定安装一个摆臂,两个横向支撑杆上的摆臂平行但方向相反;
13.所述底板在两个横向支撑杆的中间固定安装有一个舵机,所述舵机的输出轴上安装有上下摆臂;
14.所述上下摆臂的上端和下端均连接有一个连杆,上下摆臂的上端和下端分别与两个连杆的一端连接,两个连杆的另一端分别连接所述两个横向支撑杆的摆臂。
15.进一步的,所述两个纵向支撑杆上均固定安装一个摆臂,两个纵向支撑杆上的摆臂平行但方向相反;
16.所述底板在两个纵向支撑杆的中间固定安装有一个舵机,所述舵机的输出轴上安装有上下摆臂;
17.所述上下摆臂的上端和下端均连接有一个连杆,上下摆臂的上端和下端分别与两
个连杆的一端连接,两个连杆的另一端分别连接所述两个纵向支撑杆的摆臂。
18.进一步的,所述多个支撑杆为四个横向支撑杆和四个纵向支撑杆;
19.四个横向支撑杆中位于井字形机架同侧的两个横向支撑杆为一组,同组的两个横向支撑杆相互平行,并分别与另一组的两个横向支撑杆共轴,每个横向支撑杆通过两个轴承安装在底板上;
20.四个纵向支撑杆中位于井字形机架同侧的两个纵向支撑杆为一组,同组的两个纵向支撑杆相互平行,并分别于另一组的两个纵向支撑杆共轴,每个纵向支撑杆通过两个轴承安装在底板上。
21.进一步的,所述同组的两个横向支撑杆上均固定安装一个摆臂,同组的两个横向支撑杆上的摆臂平行但方向相反;
22.所述底板在同组的两个横向支撑杆的中间固定安装有一个舵机,所述舵机的输出轴上安装有上下摆臂;
23.所述上下摆臂的上端和下端均连接有一个连杆,上下摆臂的上端和下端分别与两个连杆的一端连接,两个连杆的另一端分别连接所述同组的两个横向支撑杆的摆臂。
24.进一步的,所述同组的两个纵向支撑杆上均固定安装一个摆臂,同组的两个纵向支撑杆上的摆臂平行但方向相反;
25.所述底板在同组的两个纵向支撑杆的中间固定安装有一个舵机,所述舵机的输出轴上安装有上下摆臂;
26.所述上下摆臂的上端和下端均连接有一个连杆,上下摆臂的上端和下端分别与两个连杆的一端连接,两个连杆的另一端分别连接所述同组的两个纵向支撑杆的摆臂。
27.进一步的,所述横向支撑杆和纵向支撑杆位于所述井字形机架外侧的端部与所述旋翼组件固定连接。
28.进一步的,所述多个支撑杆为两个横向支撑杆和两个纵向支撑杆;
29.两个横向支撑杆长度相等且相互平行,两个纵向支撑杆长度相等且相互平行;
30.两个横向支撑杆与两个纵向支撑杆垂直固定连接。
31.进一步的,所述横向支撑杆和纵向支撑杆位于所述井字形机架外侧的端部开设有安装槽,所述安装槽内固定安装有舵机,所述舵机的输出轴与所述旋翼组件固定连接。
32.与现有技术相比,本实用新型的有益效果为:
33.本实用新型所述的纵横结构可倾转旋翼的飞行器,其横列旋翼组和纵列旋翼组都可以在舵机的带动下倾转,使得飞行器的飞行机动性较好,飞行效率较高。
34.本实用新型所述的纵横结构可倾转旋翼的飞行器,其井字形机架的每一侧均设置有两个旋翼组件,任意一个旋翼组件发生故障停转都不会影响飞行器的飞行,最大可以允许任意两个旋翼组件停转,任意两个旋翼组件停转都会由该旋翼组件旁边的两个旋翼组件增加转速弥补升力。如果横列组四个旋翼组件都停转,飞行器不会坠毁,因为有足够的功率余量的纵列组的四个旋翼组件会增加转速弥补缺失的拉力,继续飞行或者安全降落;同样,如果纵列组的四个旋翼都停转时,横列组四个旋翼组件也会增加转速弥补缺失的拉力,继续飞行或者安全降落。
附图说明
35.构成本实用新型的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
36.图1是本实用新型的实施例一所述的纵横结构可倾转旋翼的飞行器的结构图;
37.图2是本实用新型的实施例二所述的纵横结构可倾转旋翼的飞行器的结构图;
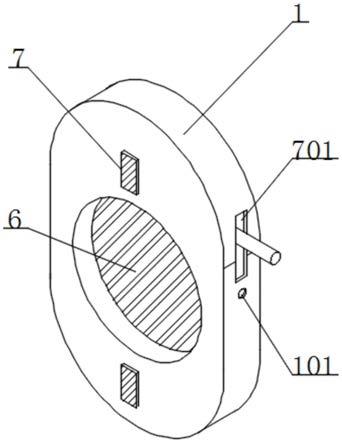
38.图3是本实用新型的实施例三所述的纵横结构可倾转旋翼的飞行器的结构图;
39.图4是本实用新型的实施例三所述的纵横结构可倾转旋翼的飞行器的局部放大图。
40.其中,1、底板,2、舵机,3、连杆,4、横向支撑杆,5、纵向支撑杆,6、旋翼组件,7、轴承,8、摆臂,9、上下摆臂。
具体实施方式
41.下面结合附图与实施例对本实用新型作进一步说明。
42.应该指出,以下详细说明都是例示性的,旨在对本实用新型提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本实用新型所属技术领域的普通技术人员通常理解的相同含义。
43.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本实用新型的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
44.在本实用新型中,术语如“上”“竖直”、“水平”、“向上”、“向下”等指示的方位或位置关系为基于附图所示的方位或位置关系,只是为了便于叙述本实用新型各部件或元件结构关系而确定的关系词,并非特指本实用新型中任一部件或元件,不能理解为对本实用新型的限制。
45.本实用新型中,术语如“固定”、“固设”等应做广义理解,表示可以是固定连接,也可以是一体地连接或可拆卸连接。对于本领域的相关科研或技术人员,可以根据具体情况确定上述术语在本实用新型中的具体含义,不能理解为对本实用新型的限制。
46.实施例一
47.本实施例提供了一种纵横结构可倾转旋翼的飞行器,包括由多个支撑杆组成的井字形机架,支撑杆位于井字形机架外侧的端部设置有旋翼组件,旋翼组件可绕支撑杆的轴线倾转,且位于井字形机架同侧的两个旋翼组件的中轴线始终保持平行。
48.井字形机架的下方连接有机舱,机舱下部设有起落架,机舱内部设有电池、飞控和电调,电池连接飞控及电调,电调连接旋翼组件的电机,飞控连接电调,实现了控制各个旋翼组件电机的转速,进而控制飞行器。
49.本实施例公开的一种纵横结构可倾转旋翼的飞行器,如图1所示,包括:底板1、两个舵机2、四个连杆3、四个支撑杆(包括两个横向支撑杆4和两个纵向支撑杆5)、八个旋翼组件6、八个轴承7、四个摆臂8和两个上下摆臂9。
50.旋翼组件6包括电机座、电机和螺旋桨,电机安装在电机座上,螺旋桨安装在电机
输出轴上,并可跟随电机输出轴旋转。
51.两个横向支撑杆4长度相等且相互平行,每个横向支撑杆4通过两个轴承7安装在底板1上,每个横向支撑杆4穿过两个轴承7的内圈,每个轴承7固定在底板1上;每个横向支撑杆4两端分别固定安装一个旋翼组件6,具体的,每个横向支撑杆4的端部与电机座固定连接,可以看做一个横列式四旋翼飞行器。
52.两个纵向支撑杆5长度相等且相互平行,每个纵向支撑杆通过两个轴承7安装在底板1上,每个纵向支撑杆5穿过两个轴承7的内圈,每个轴承7固定在底板1上;每个纵向支撑杆5两端分别固定安装一个旋翼组件6,具体的,每个纵向支撑杆5的端部与电机座固定连接,可以看做一个纵列式四旋翼飞行器。
53.两个横向支撑杆4与两个纵向支撑杆5为垂直交叉,组成井字形机架,井字形机架通过八个轴承7组合在底板1上,可以看做一个横列式四轴飞行器和一个纵列式四轴飞行器组合在一起。
54.两个横向支撑杆4上分别固定安装一个摆臂8,两个横向支撑杆4上的摆臂8平行但方向相反,具体的,两个横向支撑杆4中的一个横向支撑杆4的摆臂8垂直朝上安装,另一个横向支撑杆4的摆臂8垂直朝下安装。
55.底板1在两个横向支撑杆4的中间固定安装有一个舵机2,舵机2的输出轴上安装有上下摆臂9;上下摆臂9的上端连接一个连杆3的一端,该连杆3另一端连接横向支撑杆上垂直朝上安装的摆臂8;上下摆臂9的下端连接一个连杆3,该连杆3的另一端连接横向支撑杆上垂直朝下安装的摆臂8。连接完成后,两个横向支撑杆4可由舵机的带动下共同旋转,同时带动横列的四个旋翼组件共同绕横向支撑杆4的轴线倾转。舵机2与飞控连接。
56.两个纵向支撑杆5上分别固定安装一个摆臂8,两个纵向支撑杆5上的摆臂8平行但方向相反,具体的,两个纵向支撑杆5中的一个纵向支撑杆5的摆臂8垂直朝上安装,另一个纵向支撑杆5的摆臂8垂直朝下安装。
57.底板1在两个纵向支撑杆5的中间安装有一个舵机2,舵机2的输出轴上安装有上下摆臂9,上下摆臂9的上端连接一个连杆3的一端,该连杆3另一端连接纵向支撑杆5上垂直朝上安装的摆臂8的上端;上下摆臂9的下端连接一个连杆3,该连杆3的另一端连接纵向支撑杆5上垂直朝下安装的摆臂8的下端。连接完成后,两个纵向支撑杆5可由舵机的带动下共同旋转,同时带动纵列的四个旋翼组件共同绕纵向支撑杆5的轴线倾转。
58.在使用时:
59.为描述方便,假定两横两纵四个方向每个方向的两个旋翼组件设为一组,顺时针分别为旋翼组a、旋翼组b、旋翼组c、旋翼组d四个组,工作时同一组的两个旋翼组件转速相同、共同倾转、倾转角度相同;其中,纵列旋翼组为旋翼组a和旋翼组c,横列旋翼组为旋翼组b和旋翼组d。
60.飞行器在飞行时横列和纵列旋翼组是统一协同动作的,在向前飞行时纵列旋翼组a的位置朝前方,旋翼组c的位置在后,横列旋翼组d在左侧,旋翼组b在右侧;启动时四个旋翼组的转速相同,逐渐加速到一定转速后产生的拉力拉动飞行器起飞离地,当拉力与飞行器的重量相等时,飞行器处于悬停的状态;前飞时,操控舵机带动横列的旋翼组d和旋翼组b带逐渐向前倾转至一个角度,倾斜的旋翼面产生向上的升力和向前的拉力,拉动飞行器缓慢向前加速飞行,此时纵列旋翼组a和旋翼组c不倾转,转速相同,主要负责提供升力并保持
飞行器的前后平衡;向左转弯时增加横列旋翼组b的转速,减小旋翼组d的转速,纵列旋翼组转速不变,飞行器以向左倾斜的姿态向左转弯,向右转弯执行相反操作;俯仰由操控纵列旋翼组的转速差实现,前飞时增加旋翼组a的转速减小旋翼组c的转速时飞行器向上爬升,减小旋翼组a的转速增加旋翼组c的转速时飞行器向下俯冲;在向前飞行时操控舵机带动纵列旋翼组共同向左倾转时,飞行器在平飞的过程中会向左漂移,反之向右漂移。
61.本实施例的飞行器的横列和纵列旋翼组可以共同倾转,使得做转弯等机动动作时效率高机动性好,并且前后飞行时不必倾斜机身,向前飞行时还可以向左或向右漂移。
62.实施例二
63.本实施例提供了一种纵横结构可倾转旋翼的飞行器。
64.本实施例公开的一种纵横结构可倾转旋翼的飞行器,如图2所示,包括:底板1、四个舵机2、八个连杆3、多个支撑杆(包括四个横向支撑杆4和四个纵向支撑杆5)、八个旋翼组件6、十六个轴承7、八个摆臂8和四个上下摆臂9。
65.四个横向支撑杆4与四个纵向支撑杆5的轴线为垂直交叉关系,组成井字形机架。
66.四个横向支撑杆4中位于井字形机架同侧的两个横向支撑杆4为一组,因此,四个横向支撑杆4被分为两组,同组的两个横向支撑杆4相互平行,并分别与另一组的两个横向支撑杆4共轴,每个横向支撑杆4位于井字形机架内侧的部分均通过两个轴承7安装在底板1上,每个横向支撑杆4位于井字形机架外侧的端部均固定安装一个旋翼组件6。
67.同组的两个横向支撑杆4由一个舵机2通过连杆3来驱动其倾转,具体连接为:同组的两个横向支撑杆4上均固定安装一个摆臂8,同组的两个横向支撑杆4上的摆臂8平行但方向相反;底板1在同组的两个横向支撑杆4中间固定安装一个舵机2,舵机2输出轴固定安装有上下摆臂9,上下摆臂9垂直安装;上下摆臂9的上端和下端均连接有一个连杆3,上下摆臂9的上端和下端分别与两个连杆3的一端连接,两个连杆3的另一端分别连接同组的两个横向支撑杆4的摆臂8,具体的:上下摆臂9的上端连接一个连杆3的一端,该连杆3的另一端连接一个摆臂8,摆臂8垂直向上固定安装在一个横向支撑杆4上;上下摆臂9的下端连接一个连杆3的一端,连杆3另一端连接一个摆臂8,该摆臂8垂直朝下固定安装在同组的另一个横向支撑杆4上;连接完成后,每个组的两个旋翼组件都可以在各自的舵机带动下共同倾转、独立倾转。
68.四个纵向支撑杆5中位于井字形机架同侧的两个纵向支撑杆5为一组,因此,四个纵向支撑杆5被分为两组,同组的两个纵向支撑杆5相互平行,并分别与另一组的两个纵向支撑杆5共轴,每个纵向支撑杆5位于井字形机架内侧的部分均通过两个轴承7安装在底板1上,每个纵向支撑杆5位于井字形机架外侧的端部均固定安装一个旋翼组件6。
69.同组的两个纵向支撑杆5由一个舵机2通过连杆3来驱动其旋转,具体连接为:底板在同组的两个纵向支撑杆5中间固定安装一个舵机2,舵机2输出轴固定安装有上下摆臂9,上下摆臂9垂直安装,上下摆臂9的上端连接一个连杆3的一端,该连杆3的另一端连接一个摆臂8,摆臂8垂直向上固定安装在一个纵向支撑杆5上;上下摆臂9的下端连接一个连杆3的一端,该连杆3另一端连接一个摆臂8,该摆臂8垂直朝下固定安装在同组的另一个纵向支撑杆5上;连接完成后,每个组的两个旋翼组件都可以在各自的舵机带动下共同倾转、独立倾转,井字形机架的四个方向中,每个方向的两个旋翼组件都可以由一个舵机带动分别倾转而非共同倾转。
70.旋翼组a、旋翼组b、旋翼组c、旋翼组d四个旋翼组都各自有了独立的支撑杆。
71.使用时:
72.起飞和悬停时四个旋翼组不倾转,向前飞时飞控操控横列旋翼组d和旋翼组b的舵机共同向前倾转,倾转速度和角度相同,飞行器向前直飞;前飞时向左转弯时,横列旋翼组d前倾角度减小一些转速减小一些,横列旋翼组b前倾角度增加一些转速增加一些,同时纵列旋翼组a向左倾转一些,纵列旋翼组c向右倾转一些,飞行器以向左倾斜的姿态向左转弯,向右转弯四个旋翼组做相反动作;俯仰同样由纵列旋翼组的转速差实现,前飞时旋翼组a增加转速,旋翼组c减小转速,飞行器向上爬升,前飞时旋翼组a减小转速,旋翼组c增加转速飞行器向下俯冲;在向前飞行时操控纵列旋翼组两个舵机带动两个纵列旋翼组共同向左倾转时,飞行器在平飞的过程中会向左漂移,反之向右漂移。
73.实施例三
74.本实施例提供了一种纵横结构可倾转旋翼的飞行器。
75.本实施例公开的一种纵横结构可倾转旋翼的飞行器,如图3和图4所示,包括八个舵机2、多个支撑杆(包括两个横向支撑杆4和两个纵向支撑杆5)和八个旋翼组件6。
76.两个横向支撑杆4长度相等且相互平行,两个纵向支撑杆5长度相等且相互平行,两个横向支撑杆4与两个纵向支撑杆5垂直交叉固定连接。
77.支撑杆位于井字形机架外侧的端部开设有安装槽,安装槽内固定安装有舵机2,舵机2的输出轴固定连接一个旋翼组件6,具体的,每个舵机2的输出轴与一个旋翼组件6的电机座固定连接。
78.本实施例与实施例2基本相同,不同的是驱动倾转的舵机安装在每个支撑杆的外端,共八个,直接驱动旋翼组件,执行飞行动作时飞控操控每个旋翼组的两个舵机同步动作,即实现和实施例2一样的飞行动作。
79.使用方法与实施例2相同,这里不再累述。
80.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。