1.本发明属于防御探测监视技术领域,特别是涉及一种多层次拦截防御系统的多源探测融合算法。
技术背景
2.近年来兴起采用低慢小飞行器进行情报侦察,低慢小飞行器是指轻型无人机、航模、多旋翼无人机、固定翼无人机、无人直升机,这类低慢小飞行器一般具有发现难,预警时间短等特点,针对这类低慢小蜂群飞行器,现有防御系统探测手段较为单一,对其分辨能力较差;
3.现有针对空中低小慢目标的信息融合技术应用较为广泛,但大多融合算法是对同类探测器的探测信息进行融合,难以结合各类探测器的优势得到最优的探测结果,为了更精准的计算目标特征信息,需要一种新的目标信息融合算法,融合不同探测器得到的不同维度的特征信息,得到最优的融合解。
技术实现要素:
4.为了解决上述问题,本发明提出了一种多层次拦截防御系统的多源探测融合算法,能够实时完成将不同源、不同探测种类的目标信息进行融合,并进行目标特征分类的一种算法。本发明能结合不同探测器的优势,融合不同维度特征信息,得到最优的算法融合解,实时实现目标防御。
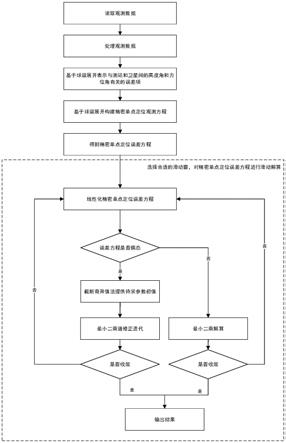
5.本发明采用的技术方案是一种多层次拦截防御系统的多源探测融合算法,包括步骤:
6.s1、通过多源探测器对运动目标进行探测,获取不同特征信息;
7.探测方式包括多普勒雷达探测、雷达成像探测、光学探测、红外探测;
8.s2、进行多元目标信息融合处理,具体包括如下步骤:
9.s21、目标区分算法;
10.u1=[a1,a2,a3,a4,...an];
[0011]
u2=[b1,b2,b3,b4,...bn];
[0012]
u3=[c1,c2,c3,c4,...cn];
[0013]
u4=[d1,d2,d3,d4,...dn];
[0014]
x=[a1,a2,a3,a4,...an,b1,b2,b3,b4,...bn,c1,c2,c3,c4,...cn,d1,d2,d3,d4,...dn]
[0015]
u1,u2,u3,u4分别为四种探测方式得到的信息矩阵;
[0016]
x为四种探测方式得到的所有信息的矩阵;
[0017]
s22、将每一采样时刻的采样数据,按照特征进行类型划分,把待分析的探测数据分为m类,1<m<n;
[0018]
s23、选择具有同类特征的数据进行映射泛化处理,得到探测信息函数v=[vij|i
=1,2...,n,j=1,2,...,s],再提取出需要的特征种类;
[0019]
s24、得到特征目标函数;
[0020][0021]
式中,m为特征的种类维数,μ
ik
为每种特征的加权,d
ik
表示特征节点与特征中心的欧式距离,其中c是从m个种类提取的有意义的特征种类的数量,1<c<m;
[0022]
(d
ik
)2=||x
k-vi||2,其中xk为特征节点,是x矩阵中的第k项;vi为中心节点,其初始值为赋予的经验值,后续用每一次计算得到的最优解迭代;
[0023]
且
[0024]
s25、构造出最优目标函数:
[0025]
s26、得到全局最优解。
[0026]
本发明还提供的一种多层次拦截防御系统的多源探测融合算法,其特征在于,包括以下步骤:
[0027]
q1、通过多源探测器对运动目标进行探测,获取不同特征信息;
[0028]
探测方式包括多普勒雷达探测、雷达成像探测、光学探测;
[0029]
q2、进行多元目标信息融合处理,具体包括如下步骤:
[0030]
q21、目标区分算法;
[0031]
u1=[a1,a2,a3,a4,...an];
[0032]
u2=[b1,b2,b3,b4,...bn];
[0033]
u3=[c1,c2,c3,c4,...cn];
[0034]
x=[a1,a2,a3,a4,...an,b1,b2,b3,b4,...bn,c1,c2,c3,c4,...cn]
[0035]
u1,u2,u3分别为三种探测方式得到的信息矩阵;
[0036]
x为三种探测方式得到的所有信息的矩阵;
[0037]
q22、将每一采样时刻的采样数据,按照特征进行类型划分,把待分析的探测数据分为m类,1<m<n;
[0038]
q23、选择具有同类特征的数据进行映射泛化处理,得到探测信息函数v=[vij|i=1,2...,n,j=1,2,...,s],再提取出需要的特征种类;
[0039]
q24、得到特征目标函数;
[0040][0041]
式中,m为特征的种类维数,μ
ik
为每种特征的加权,d
ik
表示特征节点与特征中心的欧式距离,其中c是从m个种类提取的有意义的特征种类的数量,1<c<m;
[0042]
(d
ik
)2=||x
k-vi||2,其中xk为特征节点,是x矩阵中的第k项;vi为中心节点,其初始值是规定的经验值,后续为每一次计算得到的值迭代;
[0043]
且
[0044]
q25、构造出最优目标函数:
[0045]
q26、得到全局最优解。
[0046]
本发明还提供的一种多层次拦截防御系统的多源探测融合算法,其特征在于,包括以下步骤:
[0047]
w1、通过多源探测器对运动目标进行探测,获取不同特征信息;
[0048]
探测方式包括多普勒雷达探测、雷达成像探测、红外探测;
[0049]
w2、进行多元目标信息融合处理,具体包括如下步骤:
[0050]
w21、目标区分算法;
[0051]
u1=[a1,a2,a3,a4,...an];
[0052]
u2=[b1,b2,b3,b4,...bn];
[0053]
u3=[c1,c2,c3,c4,...cn];
[0054]
x=[a1,a2,a3,a4,...an,b1,b2,b3,b4,...bn,c1,c2,c3,c4,...cn]
[0055]
u1,u2,u3分别为三种探测方式得到的信息矩阵;
[0056]
x为三种探测方式得到的所有信息的矩阵;
[0057]
w22、将每一采样时刻的采样数据,按照特征进行类型划分,把待分析的探测数据分为m类,1<m<n;
[0058]
w23、选择具有同类特征的数据进行映射泛化处理,得到探测信息函数v=[vij|i=1,2...,n,j=1,2,...,s],再提取出需要的特征种类;
[0059]
w24、得到特征目标函数;
[0060][0061]
式中,m为特征的种类维数,μik为每种特征的加权,表示特征节点与特征中心的欧式距离,其中c是从m个种类提取的有意义的特征种类的数量,1<c<m;
[0062]
(d
ik
)2=||x
k-vi||2,其中xk为特征节点,是x矩阵中的第k项;vi为中心节点,其初始值是规定的经验值,后续为每一次计算得到的值迭代;
[0063]
且
[0064]
w25、构造出最优目标函数:
[0065]
w26、得到全局最优解。
[0066]
本发明还提供的一种多层次拦截防御系统的多源探测融合算法,其特征在于,包括以下步骤:
[0067]
r1、通过多源探测器对运动目标进行探测,获取不同特征信息;
[0068]
探测方式包括多普勒雷达探测、光学探测、红外探测;
[0069]
r2、进行多元目标信息融合处理,具体包括如下步骤:
[0070]
r21、目标区分算法;
[0071]
u1=[a1,a2,a3,a4,...an];
[0072]
u2=[b1,b2,b3,b4,...bn];
[0073]
u3=[c1,c2,c3,c4,...cn];
[0074]
x=[a1,a2,a3,a4,...an,b1,b2,b3,b4,...bn,c1,c2,c3,c4,...cn]
[0075]
u1,u2,u3分别为三种探测方式得到的信息矩阵;
[0076]
x为三种探测方式得到的所有信息的矩阵;
[0077]
r22、将每一采样时刻的采样数据,按照特征进行类型划分,把待分析的探测数据分为m类,1<m<n;
[0078]
r23、选择具有同类特征的数据进行映射泛化处理,得到探测信息函数v=[vij|i=1,2...,n,j=1,2,...,s],再提取出需要的特征种类;
[0079]
r24、得到特征目标函数;
[0080][0081]
式中,m为特征的种类维数,μ
ik
为每种特征的加权,表示特征节点与特征中心的欧式距离,其中c是从m个种类提取的有意义的特征种类的数量,1<c<m;
[0082]
(d
ik
)2=||x
k-vi||2,其中xk为特征节点,是x矩阵中的第k项;vi为中心节点,其初始值是规定的经验值,后续为每一次计算得到的值迭代;
[0083]
且
[0084]
r25、构造出最优目标函数:
[0085]
r26、得到全局最优解。
[0086]
上述步骤多层次拦截防御系统的多源探测融合算法中,需要的特征种类是指,根据当前具体条件(环境、设备状况等),人为剔除部分参考价值不高的探测数据,保留具有价值的数据,得到需要的探测信息;设定好某种环境下需要剔除的数据,以后在此同种环境中即可套用此设定。
[0087]
进一步地,上述的一种多层次拦截防御系统的多源探测融合算法,其特征在于,所述最优目标函数为:
[0088][0089]
根据探测融合的经验,和大量的试验和算例验证,最优目标函数取值与同特征探测数据的不同欧氏距离相关,欧式距离对应的是每类探测数据的平均误差均值,误差均值接近,目标函数代表的加权值越高。
[0090]
进一步地,所述全局最优解为:
[0091][0092]
相比于现有技术,本发明提供的一种多层次拦截防御系统的多源探测融合算法,能对各类探测器的探测信息进行融合,进行更多元的特征融合选取,且在相同特征上,能更接近于最优探测值,从而更易对目标进行探测识别。
[0093]
选取的典型特征通过本发明的融合算法对数据进行处理后,更接近于真实值。本发明能补充多普勒雷达探测所没的探测领域功能;相比于光学探测,可以更大探测范围的补充探测数据,提前进行目标识别;相比于雷达成像探测,可以补充目标角度信息。相比于红外探测,可以补充目标角度信息。
具体实施方式
[0094]
本发明采用的技术方案是一种多层次拦截防御系统的多源探测融合算法,包括步骤:
[0095]
s1、通过多源探测器对运动目标进行探测,获取不同特征信息;
[0096]
探测方式包括多普勒雷达探测、雷达成像探测、光学探测、红外探测;
[0097]
s2、进行多元目标信息融合处理,具体包括如下步骤:
[0098]
s21、目标区分算法;
[0099]
u1=[a1,a2,a3,a4,...an];
[0100]
u2=[b1,b2,b3,b4,...bn];
[0101]
u3=[c1,c2,c3,c4,...cn];
[0102]
u4=[d1,d2,d3,d4,...dn];
[0103]
x=[a1,a2,a3,a4,...an,b1,b2,b3,b4,...bn,c1,c2,c3,c4,...cn,d1,d2,d3,d4,...dn]
[0104]
u1,u2,u3,u4分别为四种探测方式得到的信息矩阵;
[0105]
x为四种探测方式得到的所有信息的矩阵;
[0106]
s22、将每一采样时刻的采样数据,按照特征进行类型划分(以时间为行,类型为列进行排布),把待分析的探测数据分为m类,1<m<n;
[0107]
s23、选择具有同类特征的数据进行映射泛化处理,得到探测信息函数v=[vij|i=1,2...,n,j=1,2,...,s],再提取出需要的特征种类;
[0108]
s24、得到特征目标函数;
[0109][0110]
式中,m为特征的种类维数,μ
ik
为每种特征的加权,d
ik
表示特征节点与特征中心的欧式距离,其中c是从m个种类提取的有意义的特征种类的数量,1<c<m;
[0111]
(d
ik
)2=||x
k-vi||2,其中xk为特征节点,是x矩阵中的第k项;vi为中心节点,其初始值为赋予的经验值,后续用每一次计算得到的最优解迭代;
[0112]
且
[0113]
s25、构造出最优目标函数:
[0114]
s26、得到全局最优解。
[0115]
本发明还提供的一种多层次拦截防御系统的多源探测融合算法,其特征在于,包括以下步骤:
[0116]
q1、通过多源探测器对运动目标进行探测,获取不同特征信息;
[0117]
探测方式包括多普勒雷达探测、雷达成像探测、光学探测;
[0118]
q2、进行多元目标信息融合处理,具体包括如下步骤:
[0119]
q21、目标区分算法;
[0120]
u1=[a1,a2,a3,a4,...an];
[0121]
u2=[b1,b2,b3,b4,...bn];
[0122]
u3=[c1,c2,c3,c4,...cn];
[0123]
x=[a1,a2,a3,a4,...an,b1,b2,b3,b4,...bn,c1,c2,c3,c4,...cn]
[0124]
u1,u2,u3分别为三种探测方式得到的信息矩阵;
[0125]
x为三种探测方式得到的所有信息的矩阵;
[0126]
q22、将每一采样时刻的采样数据,按照特征进行类型划分,把待分析的探测数据分为m类,1<m<n;
[0127]
q23、选择具有同类特征的数据进行映射泛化处理,得到探测信息函数v=[vij|i=1,2...,n,j=1,2,...,s],再提取出需要的特征种类;
[0128]
q24、得到特征目标函数;
[0129][0130]
式中,m为特征的种类维数,μ
ik
为每种特征的加权,d
ik
表示特征节点与特征中心的欧式距离,其中c是从m个种类提取的有意义的特征种类的数量,1<c<m;
[0131]
(d
ik
)2=||x
k-vi||2,其中xk为特征节点,是x矩阵中的第k项;vi为中心节点,其初始值是规定的经验值,后续为每一次计算得到的值迭代;
[0132]
且
[0133]
q25、构造出最优目标函数:
[0134]
q26、得到全局最优解。
[0135]
本发明还提供的一种多层次拦截防御系统的多源探测融合算法,其特征在于,包括以下步骤:
[0136]
w1、通过多源探测器对运动目标进行探测,获取不同特征信息;
[0137]
探测方式包括多普勒雷达探测、雷达成像探测、红外探测;
[0138]
w2、进行多元目标信息融合处理,具体包括如下步骤:
[0139]
w21、目标区分算法;
[0140]
u1=[a1,a2,a3,a4,...an];
[0141]
u2=[b1,b2,b3,b4,...bn];
[0142]
u3=[c1,c2,c3,c4,...cn];
[0143]
x=[a1,a2,a3,a4,...an,b1,b2,b3,b4,...bn,c1,c2,c3,c4,...cn]
[0144]
u1,u2,u3分别为三种探测方式得到的信息矩阵;
[0145]
x为三种探测方式得到的所有信息的矩阵;
[0146]
w22、将每一采样时刻的采样数据,按照特征进行类型划分,把待分析的探测数据分为m类,1<m<n;
[0147]
w23、选择具有同类特征的数据进行映射泛化处理,得到探测信息函数v=[vij|i=1,2...,n,j=1,2,...,s],再提取出需要的特征种类;
[0148]
w24、得到特征目标函数;
[0149][0150]
式中,m为特征的种类维数,μik为每种特征的加权,表示特征节点与特征中心的欧式距离,其中c是从m个种类提取的有意义的特征种类的数量,1<c<m;
[0151]
(d
ik
)2=||x
k-vi||2,其中xk为特征节点,是x矩阵中的第k项;vi为中心节点,其初始值是规定的经验值,后续为每一次计算得到的值迭代;
[0152]
且
[0153]
w25、构造出最优目标函数:
[0154]
w26、得到全局最优解。
[0155]
本发明还提供的一种多层次拦截防御系统的多源探测融合算法,其特征在于,包括以下步骤:
[0156]
r1、通过多源探测器对运动目标进行探测,获取不同特征信息;
[0157]
探测方式包括多普勒雷达探测、光学探测、红外探测;
[0158]
r2、进行多元目标信息融合处理,具体包括如下步骤:
[0159]
r21、目标区分算法;
[0160]
u1=[a1,a2,a3,a4,...an];
[0161]
u2=[b1,b2,b3,b4,...bn];
[0162]
u3=[c1,c2,c3,c4,...cn];
[0163]
x=[a1,a2,a3,a4,...an,b1,b2,b3,b4,...bn,c1,c2,c3,c4,...cn]
[0164]
u1,u2,u3分别为三种探测方式得到的信息矩阵;
[0165]
x为三种探测方式得到的所有信息的矩阵;
[0166]
r22、将每一采样时刻的采样数据,按照特征进行类型划分,把待分析的探测数据分为m类,1<m<n;
[0167]
r23、选择具有同类特征的数据进行映射泛化处理,得到探测信息函数v=[vij|i=1,2...,n,j=1,2,...,s],再提取出需要的特征种类;
[0168]
r24、得到特征目标函数;
[0169][0170]
式中,m为特征的种类维数,μ
ik
为每种特征的加权,表示特征节点与特征中心的欧式距离,其中c是从m个种类提取的有意义的特征种类的数量,1<c<m;
[0171]
(d
ik
)2=||x
k-vi||2,其中xk为特征节点,是x矩阵中的第k项;vi为中心节点,其初始值是规定的经验值,后续为每一次计算得到的值迭代;
[0172]
且
[0173]
r25、构造出最优目标函数:
[0174]
r26、得到全局最优解。
[0175]
上述步骤中,需要的特征种类是指,根据当前具体条件(环境、设备状况等),人为剔除部分参考价值不高的探测数据,保留具有价值的数据,得到需要的探测信息;设定好某种环境下需要剔除的数据,以后在此同种环境中即可套用此设定。
[0176]
进一步地,上述的一种多层次拦截防御系统的多源探测融合算法,所述最优目标函数为:
[0177][0178]
根据探测融合的经验,和大量的试验和算例验证,最优目标函数取值与同特征探测数据的不同欧氏距离相关,欧式距离对应的是每类探测数据的平均误差均值,误差均值接近,目标函数代表的加权值越高。
[0179]
进一步地,全局最优解特征中心为:
[0180][0181]
本发明算法选取的典型特征中对数据进行处理后,更接近于真实值,能补充多普勒雷达探测所没的探测领域功能,且在目标角度信息可以更取信于雷达的探测值,即此类特征中由普勒雷达探测得到的数据有更高的权值。
[0182]
相比于光学探测,可以更大探测范围的补充探测数据,提前进行目标识别。在成像精度上更取信于光学探测值,即此类特征中由光学探测得到的数据有更高的权值。
[0183]
相比于雷达成像探测,可以补充目标角度信息。在远距离目标尺寸上可以更取信于雷达成像探测值,即此类特征中由雷达成像探测得到的数据有更高的权值;
[0184]
相比于红外探测,可以补充目标角度信息。在温度特征上更取信于红外探测,即此类特征中由红外探测得到的数据有更高的权值。
[0185]
通过融合算法计算出最优解之后(最优目标信息),打击策略主要采用的是条件门
限算法:主要按照距离作为门限,s为目标与系统间的距离;
[0186]
接收到敌情信息后:
[0187]
当10km≤s≤15km时,地面电磁对抗车上电子干扰设备开始工作;
[0188]
当s≤10km时,激光武器开始对目标照射毁伤;
[0189]
当微波毁伤无人机与目标距离s≤3km时,对目标进行微波毁伤;
[0190]
当s≤2km时,动能拦截器对目标进行拦截毁伤;
[0191]
当s≤200m时,释放烟雾弹,雷达和红外诱饵开始工作。
[0192]
本发明提供的一种多层次拦截防御系统的多源探测融合算法,并不仅仅限制于三种或四种探测方式,更多种类的探测方式也可使用本发明的算法进行多源信息融合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。