1.本发明属于气体系统调控技术领域,涉及一种气体系统管网压力调控方法 及系统,特别涉及冶金控制技术领域中存在不确性干扰的气体系统优化调度控 制方法及管网压力波动控制方法。
背景技术:
2.工业气体广泛应用于化工、炼油、煤制气以及炼钢行业,在具体使用时气 体供需不平衡会引起管网压力波动,不确定性干扰和管网容量过小可能导致管 网压力波动超限,造成安全和生产事故。
3.以下以钢铁企业为例进行说明,在钢铁企业中,物质流表现为含铁物质在 制造流程中的动态运动和转化,能量流作为化学物理转化的反应剂驱动着物质 流。在炼铁、炼钢、连铸和热轧工艺的钢铁生产过程中,气体是一种重要的能 量物质,由于转炉间歇工作、高炉突然停炉与空分低温空分设备(asus)稳定 运行之间的矛盾,通常会导致气体供需失衡。
4.对于钢铁企业的气体能源系统,现有的调度优化主要从生产气体侧进行调 控,并未关注储氧设备缓冲能力在应对需氧量不确定性方面的重要性和作用。
技术实现要素:
5.本发明的目的在于提供一种气体系统管网压力调控方法及系统,优化管网 压力在目标值附近波动,例如在中压附近波动。
6.为了达到上述目的,本发明的基础方案为:一种气体系统管网压力调控方 法,包括以下步骤:
7.s1,对气体系统进行数学模型转化,所述数学模型的决策变量包括输送和 缓存系统管网的气体压力,所述数学模型的优化目标自变量包括压力偏差值和 对应的惩罚权重;
8.s2,对数学模型进行优化求解;
9.s3,优化解作为调度方案作用于气体系统。
10.本基础方案的工作原理和有益效果在于:针对管网压力与期望压力值之间 的偏差,设计了具有不同相对惩罚强度的压力波动优化目标。本方案可优化管 网压力波动接近于期望值,提高管网的缓冲能力,增强其鲁棒性,以更好地抵 抗不确定性干扰。
11.进一步,步骤s1中的数学模型包含决策变量、约束条件和多个优化目标的 数学表达式。
12.进一步,决策变量包含但不限于输送和缓存系统管网的压力或其线性转换;
13.约束条件表达式包含但不限于相关设备性能约束和物质平衡的等式或不等 式方程;
14.多个优化目标包含但不限于输送和缓存子系统管网的压力波动优化目标。
15.进一步,输送和缓存子系统管网的压力波动优化目标构建步骤如下:
16.s4-1,获取气体输送和缓存子系统管网压力与期望值的偏差;
17.s4-2,根据偏差值按照某公式计算其对应的相对惩罚权重;
18.s4-3,将压力偏差值和对应的惩罚权重相乘构建压力波动优化目标,通过 数学模型的优化求解得出气体系统的调度计划,使管网压力在目标压力附近波 动。
19.进一步,步骤s4-2中压力偏差相对惩罚强度与对应的压力偏差正相关;
20.步骤s4-3中在调整气体系统的调度计划时,实现压力在期望值处的波动幅 度最小化。
21.这样控制管网压力偏差,从而控制相对惩罚强度,便于进行后续调控。减 小了压力波动范围,在面对需求不确定性扰动时表现出更强的安全性。
22.进一步,多目标函数为:
[0023][0024]
其中,preflu表示管网压力波动目标函数,w
pre
表示对应的惩罚权重,大 于0,objn表示其他第n个目标函数,wn表示对应的惩罚权重。
[0025]
根据调度计划,获取相应的目标函数,便于后续调控。
[0026]
进一步,管网压力波动目标函数preflu可采用线性化或者非线性化表达。
[0027]
进一步,管网压力波动目标函数preflu采用的非线性表达式为:
[0028]
f(δp
t
)=δp
t
·
g(δp
t
),δp
t
=|p
t-p
obj
|,
[0029]
或
[0030]
其中,δp
t
为时刻t处的管网压力为p
t
时相对于目标压力p
mid
的偏差, g(δp
t
)为管网压力波动值为δp
t
时的相对惩罚强度,为调控的时间范围,t 为内的时刻,p
max
为管网压力的最大值,p
min
为管网压力的最小值。
[0031]
进一步,管网压力波动目标函数preflu采用的线性表达式为:
[0032][0033]
将函数f(δp
t
)近似为n个首尾相连的线性函数,y
t
为函数f(δp
t
)的线性 化表达,ak为压力偏差δp
t
分段第n段右端点的值,kn和bn分别为第n条线段 的斜率和截距;是一个布尔变量,指示δp
t
是否位于第n段;和分别是 δp
t
和y
t
在第n段中的分量,其中,kn和bn为预设参数,其余为决策变量,kn反映了相对惩罚强度,且k
n 1
》kn,n为线性函数的线段的条数,n为正整数,n=1, 2,
……
,n;
[0034][0035]
进一步,步骤s2中的优化求解方法涉及运筹学优化算法,或智能优化算法, 或启发式优化算法。
[0036]
管网压力波动目标函数preflu采用线性化或者非线性化表达,便于准确快 速计算管网压力波动。
[0037]
进一步,所述气体系统包括氧气系统,或燃气系统,或煤气系统,或蒸汽 系统,或惰性气体系统。
[0038]
该方法可针对多种气体系统使用,扩大使用范围。
[0039]
本发明还提供一种系统,包括控制器,所述控制器执行本发明所述方法, 获取包含了输送或缓存管网压力参数的全部气体系统参数,确定决策变量、优 化目标和约束条件,根据管网压力与期望值的偏差计算其对应的相对惩罚强度, 构建压力波动优化目标并通过加权添加到总目标中,通过优化求解算法求解最 优的调度方案,作用到实际气体系统,使管网压力在目标压力附近波动,提高 管网压力抗不确定性波动干扰的能力。
[0040]
该系统针对管道压力与中值压力之间的偏差,设计了具有不同相对惩罚强 度的压力波动优化目标,提高管网的缓冲能力,增强其鲁棒性,建立优化管网 压力波动接近安全压力范围中间,同时减少能量损失的调度模型,以更好地抵 抗不确定性干扰。
附图说明
[0041]
图1是本发明气体系统调控方法的流程示意图;
[0042]
图2是本发明一种优选实施方式中气体系统调控方法的目标函数f(δpt) 的线形图;
[0043]
图3是本发明一种优选实施方式中气体系统调控方法的管网压力波动和缓 冲能力变化示意图;
[0044]
图4是本发明一种优选实施方式中气体系统的结构示意图;
[0045]
图5是本发明一种优选实施方式中气体系统的人工调度和模型调度的管网 压力结果图;
[0046]
图6是本发明一种优选实施方式中气体系统的人工调度结果与模型调度结 果的关键指标对比图。
具体实施方式
[0047]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自 始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。 下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解 为对本发明的限制。
[0048]
在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、
ꢀ“
前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、
ꢀ“
外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了 便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特 定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0049]
在本发明的描述中,除非另有规定和限定,需要说明的是,术语“安装”、
ꢀ“
相连”、“连接”应做广义理解,例如,可以是机械连接或电连接,也可以是 两个元件内部的连通,可以是直接相连,也可以通过中间媒介间接相连,对于 本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
[0050]
具体符号命名如下:
[0051]
索引:
[0052]
t 时段序号;
[0053]
i 调度设备序号;
[0054]
k 液氧槽序号;
[0055]
g,l 气体和液体产品角标;
[0056]
g∈{g,l}产品类型;
[0057]
空分稳定运行,增负荷和降负荷模式;
[0058]
液化器关闭 启动中,稳定运行模式;
[0059]
蒸发器关闭,稳定运行模式;
[0060]
m,设备u的运作模式;
[0061]
asu,liq,eva空分,液化器和蒸发器角标;
[0062]
u∈{asu,liq,eva},调度设备类型;
[0063]
集合
[0064]
调度时间范围,tf为最后时间段;
[0065]
支持调度模型的历史时间范围;
[0066]
asu 空分集合;
[0067]
liq 液化器集合;
[0068]
eva 蒸发器集合;
[0069]
inv 液氧槽集合;
[0070]
u{asu,liq,eva},设备类型集合;
[0071]mu
设备u运作模式集合
[0072]
转移关系集合:第i号设备u运作模式m向模式m'转移后需最小保持 时间;
[0073]
转移关系集合:第i号设备u运作模式m向模式m'转移后有最大保持 时间限制;
[0074]
转移关系集合:第i号设备u运作模式m禁止向模式m'转移;
[0075]
参数
[0076]
fa
i,k 空分i与液氧槽k连接为1,反之为0;
[0077]
fl
i,k 液化器i与液氧槽k连接为1,反之为0;
[0078]
fg
i,k 蒸发器i与液氧槽k连接为1,反之为0;
[0079]
r 0.00143t/nm3,表态下氧气体积与质量的转换关系;
[0080]
r 8.31446m3pak-1
mol-1
,理想气体常数;
[0081]
t 管网温度(k);
[0082]
v 氧气管网和球罐的总体积(km3);
[0083]
δt time period(h);
[0084]
p
max
,p
min 管网压力安全上下限;
[0085]
δ
i 空分i最大变负荷速率;
[0086]ki 空分i生产液氧和氧气的比值;
[0087]
空分i生产氧气速率的上下限;
[0088]fi
空分i允许调节负荷的频率;
[0089]
空分i运作模式m向m'转移后保持时间段数目上下限;
[0090]
l
i 液化器i的额定负荷;
[0091]gi 蒸发器i的额定负荷;
[0092]
液氧槽k容量的上下限;
[0093]
inv_ini
k 液氧槽k初始储量;
[0094]
第i个设备u模式m初始化;
[0095]
第i个设备u涉及的历史时间长度;
[0096]
第i个设备u的模式转换历史第i个设备u涉及的历史时 间长度
[0097]dt 时段t的氧气需求流量;
[0098]
连续变化
[0099]
第i号调度设备在时段t时生产产品g的负荷;
[0100]
rel
t 时段t的氧气放散速率;
[0101]
p
t 时段t的氧气管网压力;
[0102]
inv
k,t 液氧槽k在时段t的存量;
[0103]
二值化变量
[0104]
第i号调度设备u在时段t时为模式m则为1,反之为0;
[0105]
第i号调度设备u在时段t时其模式m转移为m'则为1,反之为 0。本发明中变量为斜体,常量为正体。
[0106]
本发明公开了一种气体系统管网压力调控方法,设计带变化相对惩罚强度 的管网压力波动优化目标,建立气体系统调度混合整数线性规划模型,相对惩 罚机制可以有效抑制管网压力极大偏离目标值(例如中值)的概率,即使管道 容积减半,其压力安全也得到很大概率的保障,优化管网压力在中压附近波动。
[0107]
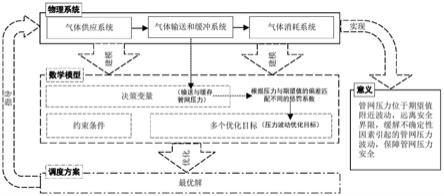
本方案首先分析管网压力与缓冲能力的关系,以及不同管道容积下需要气 量不确定性的干扰。然后,针对管道压力与中值压力之间的偏差,设计并线性 化具有不同相对惩罚强度的压力波动优化目标,进一步建立基于混合整数线性 规划(mixed integer linear programming,milp)的优化管网压力波动和气 体放散的气体系统调度模型。如图1所示,气体系统管网压力调控方法包括以 下步骤:
[0108]
s1,对气体系统进行数学模型转化,其中气体系统包括氧气系统,或燃气 系统,或煤气系统,或蒸汽系统,或惰性气体系统。
[0109]
优选地,数学模型为数学规划模型,或统计学习模型。更优选地,步骤s2 中的数学模型包含决策变量、约束条件和多个优化目标的数学表达式。决策变 量包含但不限于输送和缓存系统管网的压力或其线性转换。约束条件表达式包 含但不限于相关设备性能约束和物质平衡的等式或不等式方程。多个优化目标 包含但不限于输送和缓存子系统管网的压力波动优化目标。
[0110]
s2,数学模型进行优化求解,优化求解方法涉及运筹学优化算法,或智能 优化算法,或启发式优化算法。
[0111]
s3,优化求解作为调度方案指作用于气体系统。
[0112]
气体系统包括生产子系统、输送与缓存子系统和消耗子系统;生产子系统 生产气体通过输送与缓存子系统的传送和缓存最后送达到消耗子系统。生产子 系统包括气体生产设备,生产气体和液体产品,输送至输送与缓存子系统。输 送和缓存子系统主要包括蒸发器和液化器,实现液体与气体产品的相互转换; 液体罐,负责液体产品的存储;相互连接的气体管网和球罐,用于气体的临时 储存和输送,消耗子系统由气体用户和气体排放组成。
[0113]
气体系统管网压力调控方法还包括以下步骤:
[0114]
梳理气体生产子系统、气体输送与缓存子系统和气体消耗子系统的关系, 其中,气体输送和缓存系统管网包含但不限于管网和球罐的气体输送和缓存设 备。
[0115]
梳理气体生产子系统、气体输送与缓存子系统和气体消耗子系统中相关设 备的物理约束。具体物理约束包含但不限于设备的性能条件约束和设备间的物 质平衡约束。
[0116]
本发明的一种优选方案中,输送和缓存子系统管网的压力波动优化目标构 建步骤如下:
[0117]
s4-1,获取气体输送和缓存子系统管网压力与期望值的偏差;
[0118]
s4-2,根据偏差值按照某公式计算其对应的相对惩罚权重,步骤s4-2中压 力偏差相对惩罚强度与对应的压力偏差正相关。
[0119]
s4-3,将压力偏差值和对应的惩罚权重相乘构建压力波动优化目标,通过 数学模型的优化求解得出气体系统的调度计划,使管网压力在目标压力附近波 动。步骤s4-3中在调整气体系统的调度计划时,实现压力在期望值处的波动幅 度最小化。
[0120]
在调整气体消耗子系统的调度计划时,实现管网压力波动最小化。
[0121]
多目标函数为:
[0122]
y=min(preflu
×wpre
oxyrel
×wrel
),
[0123]
preflu表示管网压力波动目标函数,w
pre
表示对应的惩罚权重,大于0, oxyrel表示氧气放散优化目标,w
rel
表示对应的惩罚权重,大于0。
[0124]
如图3所示,黑色曲线直观地显示了管道压力波动过程。三个灰度三角形 箭头生动地描述了压力水平与管道存储、供应和缓冲能力之间的关系,箭头指 向下降方向。b点满足压力上限,超过上限可能导致管网安全事故,d点达到压 力下限,如果超过该下限,将因氧气不足而破坏钢铁生产的安全,a点和c点处 于中间压力,该压力具有较大的氧气储存空间和供应裕度,并且存在较大的压 力升高和降低缓冲空间。因此,管道压力越接近中值,缓冲容量越大,管网缓 冲能力越强,管网对氧气需求不确定性的干扰和管道容积变化的影响处理得越 好。为了提高管网缓冲能力和安全性,本实施例通过同时最小化阴影面积和δ pt来优化压力波动到接近中值压力水平。
[0125]
本发明的一种优选方案中,管网压力波动目标函数preflu采用的非线性表 达式为:
[0126]
在最小化阴影区域的同时,应避免极端的δpt。由于的大部分范围内δpt 非常低,δpt的平均值较低,但极端δpt对管网的安全构成威胁。在本方案中, δpt与各种相对惩罚强度g(δpt)匹配,δpt越大,威胁越大,g(δpt)也越大, δpt和g(δpt)的乘积f(δpt)被最小化以减少极端δpt的出现概率;
[0127]
f(δp
t
)=δp
t
·
g(δp
t
),δp
t
=|p
t-p
obj
|,p
obj
=(p
max
p
min
)/2,
[0128]
或
[0129]
其中,目标函数f(δpt)将是非线性的,并加速增长,如图2所示。δp
t
为 时刻t处的管网压力为p
t
时相对于目标压力p
obj
的偏差,g(δp
t
)为管网压力 波动值为δp
t
时的相对惩罚强度,为调控的时间范围,t为内的时刻,p
max
为管网压力的最大值,p
min
为管网压力的最小值。
[0130]
管网压力波动目标函数preflu采用的线性表达式为:对milp建模,需要将 目标函数线性化,包括去除δpt的绝对值和函数f()的分段线性化。首先,通过 添加约束去除δpt的绝对值,等效目标函数为:
[0131][0132]
将函数f(δp
t
)近似为n个首尾相连的线性函数,y
t
为函数f(δp
t
)的线性 化表达,ak
为压力偏差δp
t
分段第n段右端点的值,kn和bn分别为第n条线段 的斜率和截距;是一个布尔变量,指示δp
t
是否位于第n段;和分别是 δp
t
和y
t
在第n段中的分量,其中,kn和bn为预设参数,其余为决策变量,kn反映了相对惩罚强度,且k
n 1
》kn,n为线性函数的线段的条数,n为正整数,n=1, 2,
……
,n;
[0133][0134]
气体释放量目标函数为:
[0135][0136]
其中,rel
t
表示第t个时间段内的气体释放速率,δt为在调度模型中每个 划分时段的长度。
[0137]
设备容量约束:
[0138]
引入一系列布尔变量来确定调度设备处于哪种模式,并且调度设备在 每个时间段只能处于其中一种模式。
[0139][0140]
空分(asu)负荷的变化速率有一个最大极限,因此asu的运行负载满足下 式:
[0141][0142][0143]
同时,空分(空气分离)装置在运行过程中也按下式产生固定比例的液氧,
[0144][0145]
表示asu生产氧气负荷上下限;
[0146]
蒸发器和液化器的负荷按照下式在恒定负载和零负载之间变化,
[0147][0148][0149]
设备转移关系约束;
[0150]
引入一组布尔变量来表示调度设备模式是否转移,转移关系由下式 约束,
[0151][0152]
asus模式转换为稳定运行(模式1)或液化器模式改变后,它们将保持一 定的最短时间,如下式,
[0153][0154][0155][0156]
θ仅为公式∑中叠加的序号,m1,m2,m3涉及空分和液化器的模式。
[0157]
asu在其模式转换为增加或减少负载模式后,保持时间小于设定的最大时 间,
[0158][0159][0160]
为降低设备故障风险,asu的负载调整次数在调度时间范围内应进行限制, 如下式:
[0161][0162]
asu禁止负载增加和负载减少模式之间的直接模式转换,以降低它们的故 障风险,
[0163][0164][0165]
能量平衡约束:
[0166]
输入/输出流量差与管网压力变化率之间的关系可用克拉伯龙方程,管网 的动态平衡方程为:
[0167][0168]
为确保管网安全和正常供氧,管网压力必须限制在安全范围内,
[0169][0170]
液氧罐是后备系统的储存装置,储罐中的液氧动态平衡如下:
[0171][0172]
由于液氧罐的容量有限,每个罐中的液氧存量根据下式限制在安全范围内。
[0173][0174]
在调度时间范围结束时,液氧罐中的库存水平应大于其初始水平,保证液 氧利润不亏损,实现最大利润,
[0175][0176]
初始条件包括初始液氧储量、初始管网压力和初始设备模式(空分装置、 液化器和蒸发器),如公式(1)~(3)所示。考虑到asu和液化器模式的最大/最 小保持时间约束,它们的模式转移历史将作为初始化条件,如公式(4)所示:
[0177][0178]
p0=p_ini
ꢀꢀꢀꢀ
2)
[0179][0180][0181][0182]
其中,p_ini为初始的管网压力。
[0183]
在本发明的一种优选实施方式中,对某钢铁企业的实际生产数据进行了实 验测试,氧气系统结构如图4所示。制氧系统包括4台变负荷空分装置,分别 生产3.1mpa的高压氧和一定比例的液氧。缓冲系统主要由高压管网和8个氧气 球罐组成。后备系统包括两个液氧罐、1个液化器和2个蒸发器。氧气用户主要 有8座炼钢转炉和3座炼铁高炉。小用户的耗氧量占比很小,可以忽略不计。 需氧流量包括高炉下炉过程(阴影部分)和多台转炉同时吹氧场景。实验案例 包含了某钢铁企业氧气系统完整的常规组件和氧气供需不平衡的典型场景,为 验证模型的性能提供了可靠的测试条件。
[0184]
该模型的调度时间范围对应于需氧量,平均分为72个时段。管网压力波动 优化目标函数分三段线性化,a1=0.7/3,a2=0.7*2/3,q=3。实验环境为windows 10,配备1核cpu和8gb ram。milp是根据公式用python程序语言建立的。通 过基于python的ortools求解器中的分支定界算法求解,耗时约3分钟,满足 调度现场的实时性要求。
[0185]
为了量化管网的压力波动和氧气排放,定义了几个关键指标,如平均压力 中值偏差(apmd)、最大压力中值偏差(mpmd)和氧气排放率(orr),如式(5)~(7) 所示。
[0186][0187]
[0188][0189]
其中,d
t
表示时段t的氧气需求流量,ave()和max()分别是取平均值和最 小值的函数,apmd和mpmd分别代表|δpt|在内的平均值和最小值。apmd反映 整体压力波动。且mpmd表示极端波动,这对安全性很重要。orr是内总的氧气 排放量与总需求量的比值,反映了总体排放量。apmd和mpmd值越小,管网的缓 冲能力越强。orr越小,能量损失越少。
[0190]
为了说明考虑管网压力波动优化模型(model-cpf)的有效性,以忽略压力 波动优化的模型(model-ipf)作为对比,其优化目标为式(8)。
[0191]
y=min(oxyrel
×wrel
)
ꢀꢀꢀ
8)
[0192]
人工调度和模型调度的管网压力结果如图5所示。基于人工调度的大部分 压力波动在中值压力水平以下。尤其是方框处,压力接近下限,钢铁生产很可 能因供氧不足而受到影响基于model-ipf的压力大部分时间都偏离了中值压力 水平,甚至在圆圈处达到了上限和下限。因此,一旦用户需求变化导致压力超 限,事故就极有可能发生。基于model-cpf的压力在中位压力水平附近略有波 动,表现出更好的应对需求变化的缓冲能力。
[0193]
以钢铁行业氧气管网系统的管控示例说明了方法的有效性,钢铁企业的氧 气系统多采用人工调度,人工调度结果与模型调度结果的关键指标对比如图6 所示。人工调度的apmd和mpmd指标比model-ipf好0.2mpa和0.162mpa,但比 模型cpf差0.095mpa和0.305mpa。这是因为model-ipf完全忽略了压力波动的 优化,人类通过调度经验控制压力,model-cpf具有快速优化压力波动的能力。 对于orr指标,0.8%的氧气排放量仅在人工调度中,这表明模型对氧气排放有 明显的优化效果。面对复杂多变的现场环境,人工调度可能满足可行性,但难 以实现多目标优化。在功能强大的计算机的帮助下,该模型可以快速多目标优 化。model-cpf不仅实现了零氧排放,而且减小了压力波动范围,在面对需求不 确定性扰动时表现出更强的安全性。
[0194]
压力波动优化目标中的相对惩罚强度kk及其差异率q是重要参数,q分别设 为0,1,2和3,评价需求不确定性对压力波动指标和管网安全性的影响,如表 1所示。当q=0时,即k1=k2=k3=1,压力波动优化目标不考虑相对惩罚强 度,作为比较基线。在这四组条件下,所有的氧排放率均为0,这表明它们对优 化氧排放都有很好的效果。对于表1中的每行指标,q∈{1,2,3}与基线指标相 比,有很大的提升(10%~63%),当q=3时,apmds和apmds是最好的。q越大, 压力越接近中间压力。这表差异率越大,抑制中间压力偏差的能力越强。在需 氧量不确定性试验中,表1中的mpmds随着q的增加而减小,安全率随着q的 增加而增加,表明差值率越大,越有利于抑制极端压力,越有利于提高管网安 全性。q∈{1,2,3}相对于基线的安全率提升水平随着a的增长而增加,这表明 相对惩罚强度的改善效果随着需求不确定度的增加而更加明显。因此,设置不 同的相对惩罚强度,对于抑制极端压力波动,更好地抵抗需求不确定性的干扰, 从而提高管道安全性具有重要作用。
[0195]
表1相对惩罚强度设置下管道压力波动测试指标统计
[0196][0197]
本发明还提供一种系统,包括控制器,控制器执行本发明所述方法,获取 包含了输送或缓存管网压力参数的全部气体系统参数,确定决策变量、优化目 标和约束条件,根据管网压力与期望值的偏差计算其对应的相对惩罚强度,构 建压力波动优化目标并通过加权添加到总目标中,通过优化求解算法求解最优 的调度方案,作用到实际气体系统,使管网压力在目标压力附近波动,提高管 网压力抗不确定性波动干扰的能力。
[0198]
在炼铁厂高炉正常运行期间,低压氧气需求量是稳定的。然而,钢厂转炉 的高压氧需求波动剧烈,可能导致高压管网压力波动较大。如图6所示,asus 产生高压氧气,并将其输送至与氧气球罐相连的高压管网(即氧气管网),并以 三种方式输出给用户。第一个直接供应给钢厂,第二个和第三个分别通过调节 器和低压管网供应给钢铁厂和小用户。压力调节器通过反馈调节维持低压管网 中的压力稳定,因此,管网的氧气输出可假定为用户的耗氧量和氧气释放量。 当氧气供过于求时,管网需要储存多余的氧气。但是,当氧气需求超过供应时, 需求缺口由管网中的氧气临时供应,供需失衡会导致管网压力波动,管网具有 储氧、供氧和缓冲能力。
[0199]
本方案在2%的不确定需求偏差扰动下,可以保证管网的安全。即使不确定 度偏差达到6%,管网安全概率也超过90%。且通过设置不同的相对惩罚强度, 有效地抑制了管网的极端压力偏差,提高了管网的安全性。此外,管网的容积 减小将加速削弱抵御需求不确定性的能力,但在需求不确定性程度较低时,仍 能在管网体积减半条件下保障安全性达到90%以上。
[0200]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、
ꢀ“
具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特 征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明 书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描 述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中 以合适的方式结合。
[0201]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解: 在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、 替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。