1.本发明属于智能驾驶安全领域,具体涉及基于用户驾驶习惯的驾驶员失能判定方法。
背景技术:
2.车辆在道路上行驶,除了道路上其他车辆会对驾驶员造成安全风险,驾驶员自身的不当操作或异常驾驶状态也会造成驾驶安全风险。目前,为减少驾驶员的驾驶风险,很多智能汽车上都会通过对驾驶员驾驶数据和驾驶员面部、心率等情况进行监测、分析,并根据分析结果,在驾驶员驾驶过程中,出现风险驾驶情况时,通过预警系统发出预警。如专利:自适应用户行为的驾驶风险预警方法、系统及车辆。
3.但是,上述情况预警系统,无法对驾驶员驾驶能力进行准确监控,无法判断驾驶员是否丧失驾驶能力,仅通过疲劳度和驾驶员面部特征来检测驾驶员,对驾驶危险性进行预警,还远远不够。
技术实现要素:
4.针对上述现有技术的不足,本发明所要解决的技术问题是:如何提供一种能够提升驾驶过程中对驾驶员驾驶能力进行判定,且判定结果精准的基于用户驾驶习惯的驾驶员失能判定方法。
5.为了解决上述技术问题,本发明采用了如下的技术方案:
6.一种基于用户驾驶习惯的驾驶员失能判定方法,其特征在于,它包括:s1,用户驾驶习惯判定,判定流程为:根据当前道路环境分级和驾驶员分心时间,计算驾驶风险,获得驾驶风险值后,在用户行驶过程中,不断根据驾驶风险值计算用户驾驶习惯方差,并将计算获得的多组用户驾驶习惯方差值存储;s2,驾驶员失能判定,判定流程为:按照s1中计算公式计算获取用户当前驾驶习惯方差;然后,监控当前用户驾驶行为,同时,将用户当前驾驶习惯方差与存储的用户驾驶习惯方差进行对比,并将驾驶行为与方差值对比结果进行融合后,判定驾驶员是否失能。
7.采用上述方式后,在判定驾驶员是否失能时,先根据驾驶员在不同道路环境、不同驾驶风险度以及驾驶分心状态三种情况进行计算,获得驾驶员历史驾驶习惯方差值,然后,在判定时,通过将当前驾驶习惯方差值与历史驾驶习惯方差值比较,并或去当前驾驶行为一起融合判定,判定的依据更多,能根据驾驶员的驾驶习惯来准确获取驾驶员是否处于失能状态,判定的精确度更高,这种针对不同驾驶员个性化对比判定的方式,更加精确,为道路安全以及驾驶预警提供了有力的支撑。
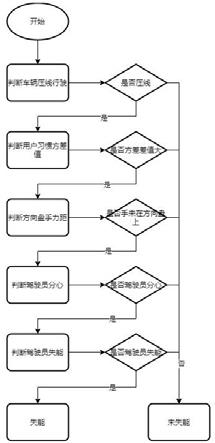
8.进一步的,驾驶员失能判定逻辑如下:监控车辆是否存在压线行驶,若未存在压线行驶,则判定驾驶员未失能;若存在压线行驶,将当前驾驶习惯方差与存储的用户驾驶习惯方差进行对比,若两方差值对比较小,且压线行驶时间超过第一阈值,则同时提取当前方向盘手力矩,根据方向盘手力矩确认驾驶员手是否在方向盘上,若驾驶员手在方向盘的力矩
小于第二阈值且持续一定时间,且监测到驾驶员处于分心状态,则判定驾驶员失能。
9.进一步的,所述当前道路环境分级,通过如下公式进行分级计算:l=a b,其中,a为道路类型,b为曲率等级;道路类型分为高速道路和城区道路,其中,高速道路为1,城区道路为2。
10.进一步的,所述驾驶员分心时间为驾驶员分心到未分心的累积时间,判断驾驶员分心时间时,先获取驾驶员受力矩,并判定驾驶员是否长时间未操作方向盘,若否,则驾驶员未分心,若是,则继续获取驾驶员刹车油门踏板使用频率,并判定驾驶员是否长时间未操作踏板,若是,则判定驾驶员分心。
11.进一步的,驾驶风险的计算公式如下:r=a
×
l
×
n,其中,r为驾驶风险值,a为安全系数,a恒小于0.1,l为当前道路环境等级,n为驾驶员分心时间,单位为秒。
12.进一步的,所述用户驾驶习惯方差,通过如下公式计算而得:其中,qr为最近n组用户驾驶习惯方差,r为最近n组驾驶风险值,e(r)为其最近n组驾驶风险数据平均值;采用上述公式计算用户当前驾驶习惯方差时,所取n为3-5,在计算s1中用户驾驶习惯方差时,n大于等于15。
附图说明
13.图1为实施例中用户驾驶习惯判定流程图;
14.图2为实施例中驾驶员分心判断流程图;
15.图3为实施例中驾驶员失能判定流程图;
16.图4为实施例中驾驶员失能判断逻辑图。
具体实施方式
17.下面结合附图和实施例对本发明进一步说明。
18.实施例:
19.如图所示,本实施例提供的基于用户驾驶习惯的驾驶员失能判定方法,它包括s1,用户驾驶习惯判定,判定流程为:根据当前道路环境分级和驾驶员分心时间,计算驾驶风险,获得驾驶风险值后,在用户行驶过程中,不断根据驾驶风险值计算用户驾驶习惯方差,并将计算获得的多组用户驾驶习惯方差值存储;s2,驾驶员失能判定,判定流程为:按照s1中计算公式计算获取用户当前驾驶习惯方差(当前驾驶习惯方差为一驾驶员当前驾驶时段内多次驾驶习惯方差);然后,监控当前用户驾驶行为,同时,将用户当前驾驶习惯方差与存储的用户驾驶习惯方差进行对比,并将驾驶行为与方差值对比结果进行融合后,判定驾驶员是否失能。
20.采用上述方式后,在判定驾驶员是否失能时,先根据驾驶员在不同道路环境、不同驾驶风险度以及驾驶分心状态三种情况进行计算,获得驾驶员历史驾驶习惯方差值,然后,在判定时,通过将当前驾驶习惯方差值与历史驾驶习惯方差值比较,并或去当前驾驶行为一起融合判定,判定的依据更多,能根据驾驶员的驾驶习惯来准确获取驾驶员是否处于失能状态,判定的精确度更高,这种针对不同驾驶员个性化对比判定的方式,更加精确,为道路安全以及驾驶预警提供了有力的支撑。
21.具体的,“用户驾驶习惯判定”流程如图1所示,主要由“判断当前道路环境”、“判断驾驶员不在环时间”、“计算驾驶风险”、“修正用户驾驶习惯”四部分组成。其中,当前道路环境分级是对车辆当前行驶环境进行分级处理,通过如下公式进行分级计算:l=a b,其中,a为道路类型,b为曲率等级;道路类型分为高速道路和城区道路,其中,高速道路为1,城区道路为2,本实施例中将曲率分为1~10级,曲率越大,等级越高。
22.进一步的,所述驾驶员分心时间(即驾驶员不在环时间)为驾驶员分心到未分心的累积时间。如图2所示,判断驾驶员分心时间时,先获取驾驶员受力矩,并判定驾驶员是否长时间未操作方向盘,若否,则驾驶员未分心,若是,则继续获取驾驶员刹车油门踏板使用频率,并判定驾驶员是否长时间未操作踏板,若是,则判定驾驶员分心。上述方向盘力矩、刹车油门踏板使用频率通过传感器获得,为现有技术,在此不作详细描述。
23.驾驶风险的计算公式如下:r=a
×
l
×
n,其中,r为驾驶风险值,a为安全系数,a恒小于0.1,l为当前道路环境等级,n为驾驶员分心时间,单位为秒。
24.进一步的,用户驾驶习惯方差,通过如下公式计算而得:其中,qr为最近n组用户驾驶习惯方差,r为最近n组驾驶风险值,e(r)为其最近n组驾驶风险数据平均值;采用上述公式计算用户当前驾驶习惯方差时,所取n为3-5,在计算s1中用户驾驶习惯方差时,n大于等于15。
25.如图4所示,驾驶员失能判定逻辑如下:监控车辆是否存在压线行驶,若未存在压线行驶,则判定驾驶员未失能;若存在压线行驶,将当前驾驶习惯方差与存储的用户驾驶习惯方差进行对比,若两方差值对比较小,且压线行驶时间超过第一阈值,则同时提取当前方向盘手力矩,根据方向盘手力矩确认驾驶员手是否在方向盘上,若驾驶员手在方向盘的力矩小于第二阈值且持续一定时间,且监测到驾驶员处于分心状态,则判定驾驶员失能。
26.最后需要说明的是,以上实施例仅用以说明本发明的技术方案而非限制技术方案,尽管申请人参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,那些对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
