1.本发明属于井盖监测终端激活技术领域,尤其是涉及一种智能井盖监测终端的激活方法。
背景技术:
2.目前城市中分布着大量的井盖,井盖数量较多,分布不集中,因此随着技术发展,在井盖上安装智能井盖监测终端对井盖进行实时监测,避免井盖异动造成交通安全。但是目前智能井盖监测终端的激活上电还存在一下不足:
3.第一,目前智能井盖监测终端一般采用打开电池壳体,连接电池接插件的方式给智能井盖监测终端通电,智能井盖监测终端进入正常工作模式,但是其现场进行拆装接线,操作不便捷,所耗费的时间及人力成本高;且存在影响电池壳体密封性的风险;
4.第二,目前通过单一方式进行智能井盖监测终端的激活工作,不够可靠,且出厂后在运输过程中会出现误触发激活的问题,导致产品电池过早开始不必要的消耗;
5.第三,目前大多数智能井盖监测终端在出厂前即安装好电池,处于正常工作模式,没有数据发送时也处于较低的休眠功耗,这样正常工作模式下不可避免需要进行定时采样,仍存在提前消耗电池的情况,缩短了电池使用寿命。
6.因此,现如今需要一种智能井盖监测终端的激活方法,通过磁钢和三轴加速度传感器联合激活,具有可靠性高、操作简单,避免误触发激活而导致电池提前被消耗,提高了智能井盖监测终端的使用寿命。
技术实现要素:
7.本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种智能井盖监测终端的激活方法,其通过磁钢和三轴加速度传感器联合激活,具有可靠性高、操作简单,避免误触发激活而导致电池提前被消耗,提高了智能井盖监测终端的使用寿命。
8.为解决上述技术问题,本发明采用的技术方案是:一种智能井盖监测终端的激活方法,所述智能井盖监测终端包括壳体、设置在所述壳体内的电子线路板和电池,所述电子线路板上集成有微控制器、无线数据通信模块和电源模块,所述微控制器的输入端接有激活模块和检测模块,所述激活模块包括磁阻传感器和三轴加速度传感器,所述检测模块为用于检测井盖异动的传感器组,所述微控制器通过无线数据通信模块与监控中心无线连接,所述电源模块为微控制器及各个用电模块供电,所述电池与电源模块连接,该方法包括以下步骤:
9.步骤一、智能井盖监测终端的初始化及激活点设定:
10.步骤101、设定微控制器、无线数据通信模块、磁阻传感器、三轴加速度传感器和传感器组均处于深度休眠模式,该智能井盖监测终端未激活;
11.步骤102、设定壳体顶部中心位置为激活点;
12.步骤二、使用磁钢激活的操作:
13.步骤201、当激活点未放置磁钢时,磁阻传感器输出高电平信号至微控制器;
14.步骤202、在激活点处放置磁钢,并将磁钢在激活点处贴合停留3秒~5秒;
15.步骤203、在磁钢贴合激活点的过程中,磁阻传感器启动检测,磁阻传感器由高电平信号转换为低电平信号至微控制器,微控制器启动工作,三轴加速度传感器启动工作进入数据采样;
16.步骤三、三轴加速度传感器的数据采集及激活结果判断:
17.步骤301、设定三轴加速度传感器的z轴正向垂直向上;
18.步骤302、三轴加速度传感器按照设定的采样间隔进行采样并发送至微控制器,微控制器得到的z轴加速度值为正值,且微控制器解算得到的倾角标准差值σ满足倾角标准差阈值要求,则激活成功;
19.步骤303、微控制器控制无线数据通信模块启动工作,并将激活成功信息通过无线数据通信模块发送至监控中心,同时传感器组启动进入工作状态。
20.上述的一种智能井盖监测终端的激活方法,其特征在于:步骤302中得到的z轴加速度值为正值,且微控制器解算得到的倾角标准差值σ满足倾角标准差阈值要求,则激活成功,具体过程如下:
21.步骤3021、按照设定的采样间隔进行x轴加速度值、y轴加速度值、z轴加速度值数据的采集,并将每一个采样时刻采集到的x轴加速度值、y轴加速度值、z轴加速度值数据发送至微控制器,直至到设定的采样时间;
22.步骤3022、微控制器按照采样时间的先后顺序将第j个采样时刻采集到的x轴加速度值记作g
x
(j),将第j个采样时刻采集到的y轴加速度值记作gy(j),将第j个采样时刻采集到的z轴加速度值记作gz(j);其中,1≤j≤j,j和j均为正整数,且j表示采样总数;
23.步骤3023、微控制器根据公式得到第j个采样时刻的倾角值θ(j);其中,g表示重力加速度,且g=9.8m/s2;
24.步骤3024、微控制器对第1个采样时刻的倾角值θ(1),...,第j个采样时刻的倾角值θ(j),...,第j个采样时刻的倾角值θ(j)进行标准差处理,得到倾角标准差值σ;
25.步骤3025、微控制器判断0<gz(j)且0≤σ<4
°
,则激活成功。
26.上述的一种智能井盖监测终端的激活方法,其特征在于:步骤302中采样间隔为50ms~100ms,设定的采样时间为4s~5s。
27.上述的一种智能井盖监测终端的激活方法,其特征在于:步骤3024中微控制器对第1个采样时刻的倾角值θ(1),...,第j个采样时刻的倾角值θ(j),...,第j个采样时刻的倾角值θ(j)进行标准差处理,得到倾角标准差值σ,具体过程如下:
28.微控制器根据公式得到倾角标准差值σ;其中,μ表示第1个采样时刻的倾角值θ(1)至第j个采样时刻的倾角值θ(j)的平均值。
29.本发明与现有技术相比具有以下优点:
30.1、本发明智能井盖监测终端的激活方法步骤简单、实现方便且操作简便,确保准
确激活,提高了智能井盖监测终端的使用寿命。
31.2、本发明将激活点处放置磁钢通过磁钢外部触发激活,以使三轴加速度传感器启动工作进入数据采样,操作便捷,省时省力。
32.3、本发明井盖异动智能监测终端在出厂前进入深度休眠模式,该模式下无传感器采样上报处于终端最低功耗,避免运输过程产生误触发或误报警,可在实际现场安装时采用磁钢外部触发与终端内部加速度传感器解算的倾角数据进行算法融合判断检测,若满足激活条件则终端进入正常工作模式,并发送激活成功信息到监控中心。
33.4、本发明井盖异动智能监测终端的激活方法具有可靠性高、操作简单的特点。
34.综上所述,本发明通过磁钢和三轴加速度传感器联合激活,具有可靠性高、操作简单,避免误触发激活而导致电池提前被消耗,提高了智能井盖监测终端的使用寿命。
35.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
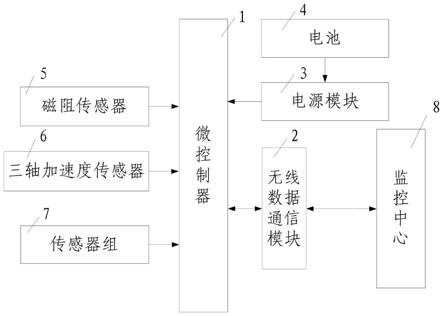
36.图1为本发明的结构示意图。
37.图2为本发明的方法流程框图。
38.附图标记说明:
39.1—微控制器;2—无线数据通信模块;3—电源模块;
40.4—电池;5—磁阻传感器;6—三轴加速度传感器;
41.7—传感器组;8—监控中心。
具体实施方式
42.如图1和图2所示的一种智能井盖监测终端的激活方法,所述智能井盖监测终端包括壳体、设置在所述壳体内的电子线路板和电池4,所述电子线路板上集成有微控制器1、无线数据通信模块2和电源模块3,所述微控制器1的输入端接有激活模块和检测模块,所述激活模块包括磁阻传感器5和三轴加速度传感器6,所述检测模块为用于检测井盖异动的传感器组7,所述微控制器1通过无线数据通信模块2与监控中心8无线连接,所述电源模块3为微控制器1及各个用电模块供电,所述电池4与电源模块3连接,该方法包括以下步骤:
43.步骤一、智能井盖监测终端的初始化及激活点设定:
44.步骤101、设定微控制器1、无线数据通信模块2、磁阻传感器5、三轴加速度传感器6和传感器组7均处于深度休眠模式,该智能井盖监测终端未激活;
45.步骤102、设定壳体顶部中心位置为激活点;
46.步骤二、使用磁钢激活的操作:
47.步骤201、当激活点未放置磁钢时,磁阻传感器5输出高电平信号至微控制器1;
48.步骤202、在激活点处放置磁钢,并将磁钢在激活点处贴合停留3秒~5秒;
49.步骤203、在磁钢贴合激活点的过程中,磁阻传感器5启动检测,磁阻传感器5由高电平信号转换为低电平信号至微控制器1,微控制器1启动工作,三轴加速度传感器6启动工作进入数据采样;
50.步骤三、三轴加速度传感器的数据采集及激活结果判断:
51.步骤301、设定三轴加速度传感器6的z轴正向垂直向上;
52.步骤302、三轴加速度传感器6按照设定的采样间隔进行采样并发送至微控制器1,微控制器1得到的z轴加速度值为正值,且微控制器1解算得到的倾角标准差值σ满足倾角标准差阈值要求,则激活成功;
53.步骤303、微控制器1控制无线数据通信模块2启动工作,并将激活成功信息通过无线数据通信模块2发送至监控中心8,同时传感器组7启动进入工作状态。
54.本实施例中,步骤302中得到的z轴加速度值为正值,且微控制器1解算得到的倾角标准差值σ满足倾角标准差阈值要求,则激活成功,具体过程如下:
55.步骤3021、按照设定的采样间隔进行x轴加速度值、y轴加速度值、z轴加速度值数据的采集,并将每一个采样时刻采集到的x轴加速度值、y轴加速度值、z轴加速度值数据发送至微控制器1,直至到设定的采样时间;
56.步骤3022、微控制器1按照采样时间的先后顺序将第j个采样时刻采集到的x轴加速度值记作g
x
(j),将第j个采样时刻采集到的y轴加速度值记作gy(j),将第j个采样时刻采集到的z轴加速度值记作gz(j);其中,1≤j≤j,j和j均为正整数,且j表示采样总数;
57.步骤3023、微控制器1根据公式得到第j个采样时刻的倾角值θ(j);其中,g表示重力加速度,且g=9.8m/s2;
58.步骤3024、微控制器1对第1个采样时刻的倾角值θ(1),...,第j个采样时刻的倾角值θ(j),...,第j个采样时刻的倾角值θ(j)进行标准差处理,得到倾角标准差值σ;
59.步骤3025、微控制器1判断0<gz(j)且0≤σ<4
°
,则激活成功。
60.本实施例中,步骤302中采样间隔为50ms~100ms,设定的采样时间为4s~5s。
61.本实施例中,步骤3024中微控制器1对第1个采样时刻的倾角值θ(1),...,第j个采样时刻的倾角值θ(j),...,第j个采样时刻的倾角值θ(j)进行标准差处理,得到倾角标准差值σ,具体过程如下:
62.微控制器1根据公式得到倾角标准差值σ;其中,μ表示第1个采样时刻的倾角值θ(1)至第j个采样时刻的倾角值θ(j)的平均值。
63.本实施例中,实际使用时,步骤302中采样间隔为100ms,设定的采样时间为5s;步骤303中j的取值等于50。
64.本实施例中,所述传感器组7为检测井盖内气体的气体传感器、用于检测井盖内温度的温度传感器或者用于检测井盖内液位的液位传感器中的一个或者两个以上。
65.本实施例中,实时使用时,所述传感器组7还可为其他满足井盖监测要求的传感器。
66.本实施例中,实时使用时,所述无线数据通信模块2为nb-iot通讯模块。
67.本实施例中,实时使用时,所述微控制器1为单片机、arm微控制器或者dsp微控制器等。
68.本实施例中,实时使用时,所述电源模块3将电池4的电压转换为微控制器1及各个用电模块所需的电压,实际使用时,电池4和电源模块3可以根据实际要求进行调整。
69.本实施例中,实时使用时,所述磁阻传感器5为tmr1302t磁阻传感器,其输出高低电平信号至微控制器1,方便微控制器1识别磁钢外部触发信号有效,以使三轴加速度传感器6进入数据采样。
70.综上所述,本发明通过磁钢和三轴加速度传感器联合激活,具有可靠性高、操作简单,避免误触发激活而导致电池提前被消耗,提高了智能井盖监测终端的使用寿命。
71.以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制,凡是根据本发明技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本发明技术方案的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。