1.本发明涉及航空电子系统技术与数据分析技术,尤其是一种融合图像与地形数据的辅助导航定位方法。
技术背景
2.地形参考导航定位技术(terrain aided navigation,简称tan)和视觉辅助导航定位技术(vision based navigation,简称vbn)都是全球导航系统(global positioning system,简称gps)信号弱或无信号情况下利用地形信息或者图像信息作为辅助手段来修正惯性导航系统(inertial navigation system,简称ins)累积误差的导航技术。以上辅助导航定位技术在地形特征明显的区域,具有较高的导航精度,对战斗机近空支援、低空强击、突防、截击等战术飞行也十分有用。
3.tan技术常用的技术为sandia惯性地形辅助导航系统(sitan),vbn技术以图像匹配算法为基础,均结合数字地形高程数据库,实现对ins的导航定位修正,为航空器提供高精度的导航定位。
技术实现要素:
4.本发明的目的是公开一种融合图像与地形数据的辅助导航定位方法,在航空器飞行过程中,基于飞行控制系统参数,结合数字地形高程数据库,通过组合sandia惯性地形辅助导航系统sitan和图像匹配算法,实现对惯性导航系统ins的导航定位修正,为航空器提供高精度的导航定位。
5.为了实现上述目的,本发明提供了一种融合图像与地形数据的辅助导航定位方法,包括以下步骤:
6.步骤a,飞行控制系统生成气压高度数据h
p
和雷达高度数据hr;
7.步骤b,飞行控制系统将生成的气压高度数据h
p
发送给惯性导航系统ins;
8.步骤c,结合飞行控制系统发送的气压高度数据h
p
,惯性导航系统ins生成惯性气压高度数据h
ins
;
9.步骤d,惯性导航系统ins发送位置数据p(l',λ')给数字地形高程数据库;
10.步骤e,根据步骤d的位置数据p(l',λ'),数字地形高程数据库提取出相应的数字地形高程数据h
dem
;
11.步骤f,飞行控制系统、惯性导航系统ins、数字地形高程数据库分别发送雷达高度数据hr、惯性气压高度数据h
ins
和数字地形高程数据h
dem
给数据处理系统;
12.步骤g,数据处理系统对步骤f的数据进行处理,计算生成实际高度数据h
t
和预测高度数据h
t’,发送给sitan算法;
13.步骤h,sitan算法根据实时的高度数据h
t
计算位置修正数据θ
sitan
;,并发送数字地形高程数据库;
14.步骤i,根据步骤d的位置数据p(l',λ')和步骤h的位置修正数据θ
sitan
,数字地形高
程数据库提取出以位置p(l',λ')为中心、2倍的θ
sitan
为边长的方形基准图像p
sitan
;
15.步骤j,机载图像传感器测得航空器下方m
×
n大小的地面实测图像i发送给图像匹配模块;
16.步骤k,图像匹配模块根据地面实测图像i和基准图像p
sitan
进行图像匹配,获得匹配图像中心即飞行精确位置p(l,λ),在基准图像p
sitan
中寻找与地面实测图像i一样大小的图像i'与地面实测图像i进行匹配,匹配公式如下:
[0017][0018]
式中,m
×
n为地面实测图像大小,m
×
m为基准图像大小,1≤i≤m-m 1,1≤j≤m-n 1;
[0019]
步骤l,重复步骤a至步骤k,持续获取航空器的精确位置。
[0020]
进一步的,所述步骤a中,飞行控制系统根据气压高度计和雷达高度计分别生成气压高度数据h
p
和雷达高度数据hr;
[0021]
进一步的,所述步骤b中,飞行控制系统将生成的气压高度数据h
p
发送给惯性导航系统ins;
[0022]
进一步的,所述步骤c中,惯性导航系统ins结合飞行控制系统发送的气压高度数据h
p
,生成惯性气压高度数据h
ins
;
[0023]
进一步的,所述步骤d中,惯性导航系统ins将当前航空器的位置数据p(l',λ')发送给数字地形高程数据库;
[0024]
进一步的,所述步骤e中,数字地形高程数据库根据惯性导航系统ins发送来的位置数据p(l',λ')提取出相应的数字地形高程数据h
dem
;
[0025]
进一步的,所述步骤f中,飞行控制系统、惯性导航系统ins、数字地形高程数据库分别将雷达高度数据hr、惯性气压高度数据h
ins
和数字地形高程数据h
dem
发送给数据处理系统;
[0026]
进一步的,所述步骤g中,数据处理系统对雷达高度数据hr、惯性气压高度数据h
ins
和数字地形高程数据h
dem
进行处理,计算生成实际高度数据h
t
和预测高度数据h
t’,并发送给sitan算法;
[0027]
进一步的,所述步骤h中,sitan算法根据实时的高度数据h
t
计算高程误差并导入量测方程,通过卡尔曼滤波计算位置修正数据θ
sitan
,并发送数字地形高程数据库;
[0028]
进一步的,所述步骤i中,根据位置数据p(l',λ')和位置修正数据θ
sitan
,数字地形高程数据库提取出以位置p(l',λ')为中心、2倍的θ
sitan
为边长的方形基准图像p
sitan
;
[0029]
进一步的,所述步骤j中,机载图像传感器测得航空器下方m
×
n大小的地面实测图像i发送给图像匹配模块;
[0030]
进一步的,所述步骤k中,图像匹配模块根据地面实测图像i和基准图像p
sitan
进行图像匹配,获得匹配图像中心即飞行精确位置p(l,λ),在基准图像p
sitan
中寻找与地面实测图像i一样大小的图像i'与地面实测图像i进行匹配,匹配公式如下:
[0031][0032]
式中,m
×
n为地面实测图像大小,m
×
m为基准图像大小,1≤i≤m-m 1,1≤j≤m-n
1;
[0033]
进一步的,所述步骤l中,重复步骤a至步骤k,实时持续的获取航空器的精确位置。
[0034]
该方法与惯性导航系统ins结合,在导航定位设备中实现,为航空器提供导航定位、威胁回避、智能贴地告警、精确武器投放等诸多功能,其导航定位结果用于修正惯性导航系统ins误差,以实现各种航行器对高精度导航定位的需要。
附图说明
[0035]
以下将结合附图对本发明作进一步说明。
[0036]
图1图示了根据本发明的实施例的典型流程。
具体实施方式
[0037]
以下通过较佳实例对本发明的技术方案进行说明,但下述实例并不能限制本发明的保护范围。
[0038]
本发明所提供的融合图像与地形数据的辅助导航定位方法可以软件的形式内置于航空器上的航空电子装置,如导航定位系统、飞行控制系统、飞行管理系统等航电设备。此外,本发明提供的高精度的战斗机地形参考导航定位方法不仅可用于战斗机,也可应用于攻击机、作战无人机等。
[0039]
附图1为根据本发明的一个实施例形成的单周期典型流程图。在每周期内,方法按照附图1所示顺序执行。
[0040]
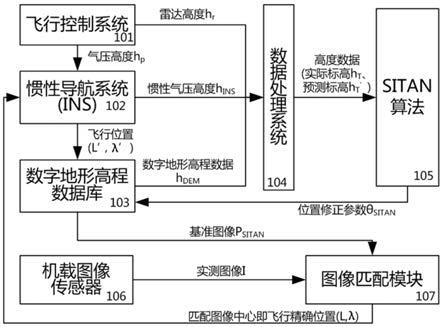
参照图1,在方块101处,飞行控制系统生成气压高度数据h
p
和雷达高度数据hr,并将生成的气压高度数据h
p
发送给惯性导航系统ins,将雷达高度数据hr发送给数据处理系统。
[0041]
参照图1,在方块102处,结合飞行控制系统发送的气压高度数据h
p
,惯性导航系统ins生成惯性气压高度数据h
ins
,并发送惯性气压高度数据h
ins
给数据处理系统,另外,惯性导航系统ins发送位置数据p(l',λ')给数字地形高程数据库。
[0042]
参照图1,在方块103处,根据位置数据p(l',λ'),数字地形高程数据库提取出相应的数字地形高程数据h
dem
,并发送给数据处理系统,并结合sitan算法发送来的位置修正数据θ
sitan
,数字地形高程数据库提取出以位置p(l',λ')为中心、2倍的θ
sitan
为边长的方形基准图像p
sitan
,并发送给图像匹配模块。
[0043]
参照图1,在方块104处,数据处理系统对数据进行处理,计算生成实际高度数据h
t
和预测高度数据h
t’,发送给sitan算法。
[0044]
参照图1,在方块105处,sitan算法根据实时的高度数据h
t
,计算位置修正数据θ
sitan
,并将计算的位置修正数据θ
sitan
发送给数字地形高程数据库。
[0045]
参照图1,在方块106处,机载图像传感器测得航空器下方m
×
n大小的地面实测图像i,并发送给图像匹配模块。
[0046]
参照图1,在方块107处,图像匹配模块根据地面实测图像i和基准图像p
sitan
进行图像匹配,获得匹配图像中心即飞行精确位置p(l,λ),在基准图像p
sitan
中寻找与地面实测图像i一样大小的图像i'与地面实测图像i进行匹配,匹配公式如下:
[0047][0048]
式中,m
×
n为地面实测图像大小,m
×
m为基准图像大小,,1≤j≤m-n 1。
[0049]
值得说明的是,上述描述是基于发明的具体实施例而进行的,尽管参照较佳实施例在本发明进行了详细阐述,但本领域的技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。