1.本实用新型涉及电动自行车技术领域,特别涉及助力装置、中置电机及电动自行车。
背景技术:
2.普通自行车一般全部依靠人力来驱动行驶,普通人难以进行长距离、长时间地行驶,更难以到达坡度较大的山坡,这些限制了自行车的使用和发展。相关技术中,电动助力自行车也有通过添加电机以提供辅助动力,使用小功率电机时,提供的动力不能满足大坡度的使用要求。使用大功率电机时,往往由于电机转速较高,在传递动力过程中噪音很大,大大降低了骑行舒适感。
技术实现要素:
3.本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种助力装置,能够提供额外的动力来辅助行驶,并且使噪音大大降低,提高骑行舒适感。
4.本实用新型还提出一种具有上述助力装置的中置电机及电动自行车。
5.根据本实用新型的第一方面实施例的助力装置,包括:壳体、减速系统和电机;所述减速系统包括输入轴、中间轴、输出轴、行星齿轮机构、第一齿轮减速机构和第二齿轮减速机构,所述输入轴、所述中间轴和所述输出轴均转动连接于所述壳体,所述行星齿轮机构包括太阳轮、行星轮、内齿圈和行星架,所述太阳轮固定于所述输入轴,所述内齿圈固定于所述壳体,所述行星架转动连接于所述输入轴;所述第一齿轮减速机构包括第一主动轮和第一被动轮,所述第一主动轮固定于所述行星架,所述第一被动轮固定于所述中间轴;所述第二齿轮减速机构包括第二主动轮和第二被动轮,所述第二主动轮固定于所述中间轴,所述第二被动轮固定于所述输出轴;所述电机用于驱动所述输入轴转动。
6.根据本实用新型实施例的助力装置,至少具有如下有益效果:通过增加电机和减速系统,可以在坡度较大的工况下可以提供更大的动力,从而帮助骑行者跨越山坡。并且,减速系统具有三级减速,使噪音大大降低,从而提高骑行舒适感。
7.根据本实用新型的一些实施例,所述第一主动轮设于所述行星架的外周侧。
8.根据本实用新型的一些实施例,所述行星架通过衬套或轴承连接于所述输入轴。
9.根据本实用新型的一些实施例,所述行星轮、所述第一主动轮、所述第一被动轮、所述第二主动轮和所述第二被动轮中的至少一个为塑胶材质。
10.根据本实用新型的一些实施例,相互啮合的两个齿轮为不同的材质。
11.根据本实用新型的一些实施例,所述行星轮、所述内齿圈和所述第二被动轮为塑胶材质,所述太阳轮、所述第一主动轮、所述第一被动轮和所述第二主动轮为金属材质。
12.根据本实用新型的一些实施例,所述电机包括定子和转子,所述定子固定于所述壳体,所述转子固定于所述输入轴。
13.根据本实用新型的一些实施例,所述定子包括绕组,所述绕组采用截面为非圆形的铝导线。
14.根据本实用新型的一些实施例,所述铝导线的截面为方形。
15.根据本实用新型的第二方面实施例的中置电机,包括本实用新型的第一方面实施例的助力装置。
16.根据本实用新型实施例的中置电机,至少具有如下有益效果:通过采用本实用新型的第一方面实施例的助力装置,可以在坡度较大的工况下可以提供更大的动力,从而帮助骑行者跨越山坡。并且,减速系统具有三级减速,使噪音大大降低,从而提高骑行舒适感。
17.根据本实用新型的第三方面实施例的电动自行车,包括本实用新型的第二方面实施例的中置电机。
18.根据本实用新型实施例的电动自行车,至少具有如下有益效果:通过采用本实用新型的第二方面实施例的中置电机,可以在坡度较大的工况下可以提供更大的动力,从而帮助骑行者跨越山坡。并且,减速系统具有三级减速,使噪音大大降低,从而提高骑行舒适感。
19.根据本实用新型的一些实施例,所述电动自行车包括链轮,所述输出轴连接于所述链轮。
20.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
21.下面结合附图和实施例对本实用新型做进一步的说明,其中:
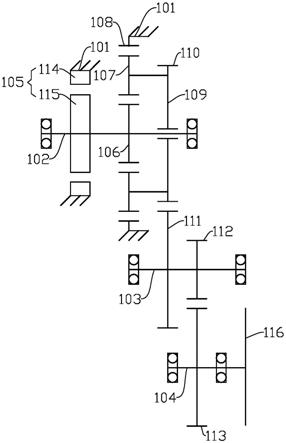
22.图1为本实用新型实施例的助力装置的原理图;
23.图2为本实用新型实施例的助力装置的示意图;
24.图3为图2示出的行星齿轮机构的轴向视图;
25.图4为相关技术中的平行轴结构。
26.附图标记:
27.101、壳体;102、输入轴;103、中间轴;104、输出轴;105、电机;106、太阳轮;107、行星轮;108、内齿圈;109、行星架;110、第一主动轮;111、第一被动轮;112、第二主动轮;113、第二被动轮;114、定子;115、转子;116、链轮;
28.401、第一齿轮;402、第二齿轮。
具体实施方式
29.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
30.在本实用新型的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方
位构造和操作,因此不能理解为对本实用新型的限制。
31.在本实用新型的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
32.本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
33.下面参照图1至图4,说明本实用新型实施例的助力装置、中置电机105及电动自行车。
34.可以理解的是,图1中各个部件以简单的图案表示以方便本领域的技术人员理解,例如,齿轮以“工”型表示,轴以“一”型表示。
35.参照图1所示,本实用新型实施例的助力装置包括壳体101、输入轴102、中间轴103、输出轴104、电机105、太阳轮106、行星轮107、内齿圈108、行星架109、第一主动轮110、第一被动轮111、第二主动轮112和第二被动轮113,并且电机105、太阳轮106、行星轮107、内齿圈108、行星架109、第一主动轮110、第一被动轮111、第二主动轮112和第二被动轮113均位于壳体101内,输入轴102、中间轴103和输出轴104与壳体101转动连接。
36.其中,输入轴102、中间轴103和输出轴104沿径向方向依次布置,电机105、太阳轮106和行星架109沿轴向方向依次布置在输入轴102上,第一主动轮110固定连接在行星架109上,以保持与行星架109同轴转动;内齿圈108固定在壳体101上,第一被动轮111和第二主动轮112沿轴向方向依次布置在中间轴103上;第二被动轮113布置在输出轴104上。
37.参照图1所示,可以理解的是,电机105包括定子114和转子115,定子114固定在壳体101上,转子115固定在输入轴102上,从而实现转子115转动带动输入轴102转动,为输入轴102提供动力。太阳轮106固定在输入轴102上,输入轴102转动也带动太阳轮106一起转动。内齿圈108与壳体101固定连接,行星轮107与太阳轮106和内齿圈108啮合,并且行星轮107转动连接至行星架109,从而实现太阳轮106的转动带动行星架109的转动。第一主动轮110与行星架109固定连接,行星架109转动会带动第一主动轮110同轴转动,即第一主动轮110也是绕输入轴102转动。第一被动轮111固定在中间轴103上,第一被动轮111与第一主动轮110啮合,第一主动轮110转动会带动第一被动轮111一起转动。第二主动轮112也固定在中间轴103上,中间轴103转动也会带动第二主动轮112一起转动。第二被动轮113固定在输出轴104上,第二被动轮113与第二主动轮112啮合,第二主动轮112转动带动第二被动轮113转动,进而带动输出轴104转动,实现动力输出。
38.可以理解的是,由于第一主动轮110与输入轴102同轴,相对平行轴结构可以减少一根轴,因此可减少零件数量,如至少可减少一根轴、两组轴承,可以减少结构成本。
39.可以理解的是,太阳轮106、行星轮107、内齿圈108和行星架109组成行星齿轮机构,在行星齿轮机构中,行星架109相当于具有齿数,且满足:行星架109齿数=太阳轮106齿数 内齿圈108齿数,太阳轮106齿数<内齿圈108齿数<行星架109齿数。
40.可以理解的是,在内齿圈108作为固定件,太阳轮106作为主动件,行星架109作为从动件的运动情况下,行星齿轮机构实现减速的效果。行星架109的旋转方向与太阳轮106
的旋转方向相同,即行星架109的旋转方向与输入轴102的旋转方向相同。
41.可以理解的是,第一被动轮111与第一主动轮110组成第一齿轮401减速机构,第一主动轮110的齿数大于第一被动轮111的齿数,从而实现减速的效果。第一主动轮110的旋转方向与行星架109的旋转方向相同,第一被动轮111的旋转方向与第一主动轮110的旋转方向相反,即第一被动轮111的旋转方向与输入轴102的旋转方向相反,中间轴103的旋转方向与输入轴102的旋转方向相反。
42.可以理解的是,第二被动轮113与第二主动轮112组成第二齿轮402减速机构,第二主动轮112的齿数大于第二被动轮113的齿数,从而实现减速的效果。第二主动轮112的旋转方向与第一被动轮111的旋转方向,第二被动轮113的旋转方向与第二主动轮112的旋转方向相反,即第二被动轮113的旋转方向与输入轴102的旋转方向相同,输出轴104的旋转方向与输入轴102的旋转方向相同。
43.可以理解的是,行星齿轮机构、第一齿轮401减速机构和第二齿轮402减速机构组成减速系统。如果使用行星齿轮机构代替第一齿轮401减速机构和第二齿轮402减速机构也可实现减速的目的,但是多组行星齿轮机构的使用会使整体结构复杂成本会出现上升。
44.可以理解的是,电机105的动力通过太阳轮106、行星轮107、内齿圈108实现一级动力放大,再通过第一主动轮110和第一被动轮111实现二级动力放大,接着通过第二主动轮112和第二被动轮113实现三级动力放大,总共通过三次动力放大,大大提升了整车的动力性。
45.需要说明的是,如果第一齿轮401减速机构用于实现一级动力放大,而行星齿轮机构用于实现二级动力放大,第二齿轮402减速机构用于实现三级动力放大,则内齿圈108要固定,会造成壳体101结构复杂。如果第一齿轮401减速机构用于实现一级动力放大,第二齿轮402减速机构用于实现二级动力放大,而行星齿轮机构用于实现三级动力放大,则会增大整体的体积,因为输出轴104一般较粗,从而造成行星齿轮机构提交增大,进而会增大整体的体积。
46.可以理解的是,为了改善助力装置的承载能力,本实用新型实施例的助力装置采用行星齿轮机构替代平行轴结构。如图3所示,图中表示的本实用新型实施例的是行星齿轮机构,在行星齿轮机构中,太阳轮106和内齿圈108可以同轴布置,所需的径向空间较小,且行星轮107有多个,可以使得太阳轮106的扭矩分配到多个位置,提升了太阳轮106的承载能力,在同样的承载能力下可减小太阳轮106的径向尺寸,从而减小内齿圈108的径向尺寸,进而整个机构的径向尺寸就减小了。如图4所示,图中表示的是现有的平行轴结构,包括第一齿轮401和第二齿轮402,第一齿轮401和第二齿轮402分别设置在两个平行的轴上,即第一齿轮401和第二齿轮402平行布置,为了实现一定的速比,平行轴结构占据的径向空间会比行星齿轮机构的更大。
47.参照图1和图2所示,可以理解的是,第一主动轮110设置在行星架109的外周侧,也即第一主动轮110为在行星架109的外周侧形成的外齿圈,从而可以从加工精度上保证第一主动轮110与行星架109的同轴度,能够提高传动精度,减少齿轮磨损。并且还可以减少一个零件,相应地减少了一个物料的管理及装配环节,达到降低成本的效果。
48.参照图1和图2所示,可以理解的是,行星架109转动连接于输入轴102。一般的行星齿轮减速结构中,行星架109是与轴保持一定间距的,即行星架109是与轴不连接的。而在本
方案中,第一被动轮111与第一主动轮110啮合,第一主动轮110固定连接在行星架109上,因此行星架109会受到第一被动轮111与第一主动轮110作用的径向力,该径向力会造成行星架109不稳定,也会影响行星轮107与太阳轮106和内齿圈108的配合,使得行星轮107与太阳轮106和内齿圈108受力不均,即产生局部受力过大,有可能会加剧齿轮的局部磨损。而本实用新型实施例行星架109转动连接于输入轴102,可以通过输入轴102对行星架109进行辅助支撑,使得行星架109更加稳定,同时也减少第一被动轮111与第一主动轮110作用的径向力对行星轮107的影响。
49.可以理解的是,行星架109可以通过衬套或轴承等常用的结构连接于输入轴102,以减少行星架109的磨损,并使得转动更加顺畅。其中,衬套是用于机械部件外,以达到密封、磨损保护等作用的配套件,是指起衬垫作用的环套。轴承的主要功能是支撑机械旋转体,降低其运动过程中的摩擦系数,并保证其回转精度。
50.可以理解的是,太阳轮106、内齿圈108、行星架109和第一主动轮110为同轴线设置,通过同轴设置的太阳轮106、内齿圈108、行星架109和第一主动轮110,能使得中置电机105的各个零件设置的更为紧凑,进而能减小输入轴102的轴向尺寸,能便于将踩踏宽度值设置于合适的值,进而能将应用该中置电机105的电动自行车上双脚之间的横向距离减小,有利于使用者发力,同时减小迎风面积,能减小风阻。
51.在现有的齿轮啮合结构中常采用金属齿轮与金属齿轮啮合,如低碳钢和低碳钢啮合,由于制造成本和工艺的限制,金属齿轮与金属齿轮啮合产生的噪音较大。本实用新型实施例应用的塑胶齿轮与金属齿轮啮合可显著的降低噪音峰值,如本实用新型实施例的行星轮107使用塑胶材料,第一主动轮110使用塑胶材料,太阳轮106使用金属材料,内齿圈108使用金属材料,第一被动轮111使用金属材料,第二主动轮112使用金属材料,第二被动轮113使用金属材料,经试验对比分贝值可降低15db。
52.当然,还可以是采用其他实施例,例如,行星轮107使用塑胶材料,内齿圈108使用塑胶材料,第二被动轮113使用塑胶材料,太阳轮106使用金属材料,第一主动轮110使用金属材料,第一被动轮111使用金属材料,第二主动轮112使用金属材料。
53.可以理解的是,行星轮107、第一主动轮110、第一被动轮111、第二主动轮112和第二被动轮113中的至少一个为塑胶材质。塑胶齿轮和金属齿轮啮合相比金属齿轮和金属齿轮啮合会大大降低噪音,从而提升骑行舒适感。
54.可以理解的是,相互啮合的两个齿轮为不同的材质。例如第一主动轮110和第一被动轮111为不同的材质,具体地,第一主动轮110使用塑胶材料,第一被动轮111使用金属材料,可以实现塑胶齿轮和金属齿轮啮合会大大降低噪音,从而提升骑行舒适感。在另外的实施例中,第一主动轮110使用塑胶材料,第一被动轮111也使用塑胶材料,但是第一主动轮110的塑胶材料与第一被动轮111的塑胶材料不同,可以避免同种塑胶材料造成的磨损严重的问题。
55.可以理解的是,在一些实施例中,行星轮107采用直齿轮设置,相对应的,太阳轮106和内齿圈108同样采用直齿设置。应当理解,在其他实施例中,行星轮107采用斜齿轮设置,相对应的,太阳轮106和内齿圈108同样采用斜齿轮设置。其中,通过斜齿设置能使得行星轮107承受更大的载荷,能提高行星轮107的过载能力,降低噪音以及使得运动更加的平稳。
56.可以理解的是,在一些实施例中,第一主动轮110采用直齿轮设置,相对应的,第一被动轮111同样采用直齿设置。应当理解,在其他实施例中,第一主动轮110采用斜齿轮设置,相对应的,第一被动轮111同样采用斜齿轮设置。其中,通过斜齿设置能使得第一主动轮110和第一被动轮111承受更大的载荷,能提高第一主动轮110和第一被动轮111的过载能力,降低噪音以及使得运动更加的平稳。
57.可以理解的是,在一些实施例中,第二主动轮112采用直齿轮设置,相对应的,第二被动轮113同样采用直齿设置。应当理解,在其他实施例中,第二主动轮112采用斜齿轮设置,相对应的,第二被动轮113同样采用斜齿轮设置。其中,通过斜齿设置能使得第二主动轮112和第二被动轮113承受更大的载荷,能提高第二主动轮112和第二被动轮113的过载能力,降低噪音以及使得运动更加的平稳。
58.相关技术中,在电机中,定子的绕线通常采用圆线绕组,圆线绕组的绕线槽满率较低,在定子体积不变的条件下,电机的功率密度和效率均较低,此类电机应用在电动自行车中,加快消耗电池的续航能力,因而对电机能效的提升有极大的需求。
59.可以理解的是,定子114包括绕组和定子铁芯,定子铁芯一般采用硅钢片裁切而成,将裁切出的硅钢片加工成卷绕式的定子铁芯,为了提高硅钢片的利用率,在裁切时需要提前设计拼料裁切方式,如果定子铁芯的齿部设置有齿靴,在切割定子铁芯时,必须要根据齿靴去设计拼料裁切方式,但是无论如何优化,在有齿靴的情况下,硅钢片的材料利用率最多也只能达70%,很难进一步提升。本实用新型实施例的定子铁芯采用无齿靴的齿部,优化拼料裁切方式,进而提高硅钢片的材料利用率。
60.可以理解的是,齿部设置为直齿状,绕组无须在齿部上绕线,可以在外部利用工装完成绕线,操作空间大,能够有效提高绕线槽满率。此外,绕组采用非圆形截面的铝导线,比如正方形截面的铝导线,而齿部采用直齿形结构,比如齿部的截面同样为正方形,绕组的铝导线匹配齿部的形状,铝导线紧密贴合在齿部的外壁,使得铝导线的排布更为紧密,因而提高了定子114的绕线槽满率,在定子114的体积不变的情况下,提升了电机105的功率密度和效率,电机105应用于电动自行车,有助于提升电动自行车的续航能力。
61.本实用新型实施例的中置电机105包括本实用新型实施例的助力装置。由于具有本实用新型实施例的助力装置所有的技术特征,因此也具有上述的所有实施例的有益效果,在此不再赘述。
62.可以理解的是,在一些实施例中,输出轴104作为脚踏轴,本实用新型实施例的中置电机105还包括动力输出件、第一单向逆止装置(图中未示出)和第二单向逆止装置(图中未示出),第一单向逆止装置设置在动力输出件与脚踏轴之间。动力输出件可以包括链轮116,用于连接链条等传动连接件,并通过链条连接于车轮,以将助力作用传递至车轮,进而提供助力作用。脚踏轴用于连接脚踏曲柄,脚踏曲柄连接脚踏板。骑行人员在脚踩脚踏板时,通过脚踏曲柄带动脚踏轴转动,第一单向逆止装置工作,人力通过第一单向逆止装置传递到动力输出件,进而将脚踏的动力传递至车轮,最终带动车轮转动。第二单向逆止装置设置在第二被动轮113和动力输出件之间。电机105的动力传递到减速系统,第二单向逆止装置工作,进而将电机105的动力传递至车轮,最终带动车轮转动。
63.另外,通过使用第一单向逆止装置,在电机105输出动力,而骑行人员没有脚踏的情况下,消除了脚踏轴对减速系统造成磁阻或者机械阻力的现象,进而使得在骑行人员没
有脚踏时保证不会增加对电机105额外的阻力。通过使用第二单向逆止装置,在电机105停止运转时,消除了电机105及减速系统对脚踏轴造成磁阻或者机械阻力的现象,进而使得在电机105未进行助力时保证不会增加对骑行人员额外的阻力。
64.可以理解的是,脚踏轴由人力带动正向转动,同时电机105未向动力输出件提供助力时,脚踏轴能够带动第一单向逆止装置工作,人力通过第一单向逆止装置传递到动力输出件,此时第二单向逆止装置空转,人力不影响减速系统,实现由人力脚踏带动动力输出件转动。另外,当骑行人员停止脚踏或者沿反向转动脚踏板时,此时脚踏轴相对第一单向逆止装置沿反向转动,即此时脚踏轴不向动力输出件传递动力。另外,当电机105输出动力,而骑行人员没有进行脚踏时,此时电机105沿正向转动,并递到动力输出件,此时第一单向逆止装置空转,电机105不影响脚踏轴。即,人力带动脚踏轴正向转动时通过第一单向逆止装置向动力输出件提供动力,在当人力带动脚踏轴沿反向转动或者没有相对转动时,脚踏轴和第一单向逆止装置相对转动,即脚踏轴不向动力输出件传递阻力。
65.可以理解的是,当电机105沿正向转动时能通过第二单向逆止装置带动动力输出件沿正向转动。另外,当脚踏轴带动动力输出件转动,并且同时电机105未向动力输出件提供助力时,此时第二单向逆止装置空转,即此时动力输出件能相对第二单向逆止装置转动,不影响脚踏轴转动。当电机105相对于第二单向逆止装置的转动方向为反向时,此时电机105也不向动力输出件传递动力。即,电机105在相对第二单向逆止装置沿正向转动时通过第二单向逆止装置向动力输出件提供助力,在当电机105相对于第二单向逆止装置沿反向转动或者没有相对转动时,电机105和第二单向逆止装置相对转动,即电机105不向动力输出件传递阻力。
66.需要说明的是,当脚踏轴沿正向转动和/或电机105沿正向转动并驱动动力输出件时,此时电动自行车为前行状态。
67.可以理解的是,第一单向逆止装置可以为超越离合器或者棘轮机构。第二单向逆止装置也可以为超越离合器或者棘轮机构。
68.本实用新型实施例的电动自行车包括本实用新型实施例的中置电机105。由于具有本实用新型实施例的中置电机105所有的技术特征,因此也具有上述的所有实施例的有益效果,在此不再赘述。
69.上面结合附图对本实用新型实施例作了详细说明,但是本实用新型不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
