1.本实用新型涉及起重机起重控制技术领域,具体而言,尤其涉及固定于柔性缆索的超轻起重机姿态控制机构。
背景技术:
2.超轻起重机姿态控制机构安装在柔性缆索(如威亚)之下,可以实现吊重的水平起升、空中翻转及竖直旋转一系列动作执行。由于威亚(柔性缆索)固定在建筑物结构梁上,承重能力有限,因此要求该设备必须严格控制重量,设备重量要求控制在以往常规产品重量的四分之一以内。
3.现需要开发一种超轻起重机姿态控制机构,能固定于柔性缆索上且满足重量承载要求。
技术实现要素:
4.根据上述提出的技术问题,而提供一种超轻型的适用于更为灵活的柔性缆索吊装的起重机姿态控制机构。
5.本实用新型采用的技术手段如下:
6.一种固定于柔性缆索的超轻起重机姿态控制机构包括:上部机构、下部机构和电控设备;
7.上部机构包括:吊绳、平台ⅰ,下部机构包括:平台ⅱ、回转机构、平台ⅲ、起升机构;
8.电控设备包括:电控柜、电缆卷筒、电动滑环;
9.回转机构包括:回转轴承、小齿轮和三合一减速电机;
10.起升机构采用电动葫芦,其包含钢丝绳来起吊吊重。
11.上部机构与下部机构通过回转轴承相连,上部机构的平台ⅰ通过吊绳安装在威亚装置之下;
12.平台ⅰ与平台ⅱ通过回转轴承相连,回转机构固定在平台ⅱ上,平台ⅲ上的四根立柱与平台ⅱ固定连接(组成框架结构),两套起升机构安装在平台ⅲ上,吊重上有四个吊点,通过钢丝绳分别与两套起升机构相连;电控设备固定在平台ⅲ上;通过控制两套起升机构的动作可实现吊重的水平起升和空中翻转,两套起升机构同时起升时,吊重水平起升;当其中一套起升机构起升,另一套机构下降,吊重实现空中翻转;由于吊重与下部机构相连,下部机构中的回转机构通过小齿轮与回转轴承啮合实现旋转,从而使吊重完成360
°
旋转动作。
13.超轻起重机姿态控制机构的主要受力结构,如平台ⅰ、平台ⅱ和平台ⅲ采用高强度的铝合金材料,采用矩形或方形铝合金管材焊接而成,既能满足强度,又能满足刚度和局部稳定性的要求,材料的选用大大降低了设备重量。
14.较现有技术相比,本实用新型具有以下优点:
15.1.实现了吊重的水平起升、空中翻转和立式360
°
旋转。
16.2.解决了设备的超轻自重问题。
17.3.电气采用遥控,可以实现远程控制。
附图说明
18.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
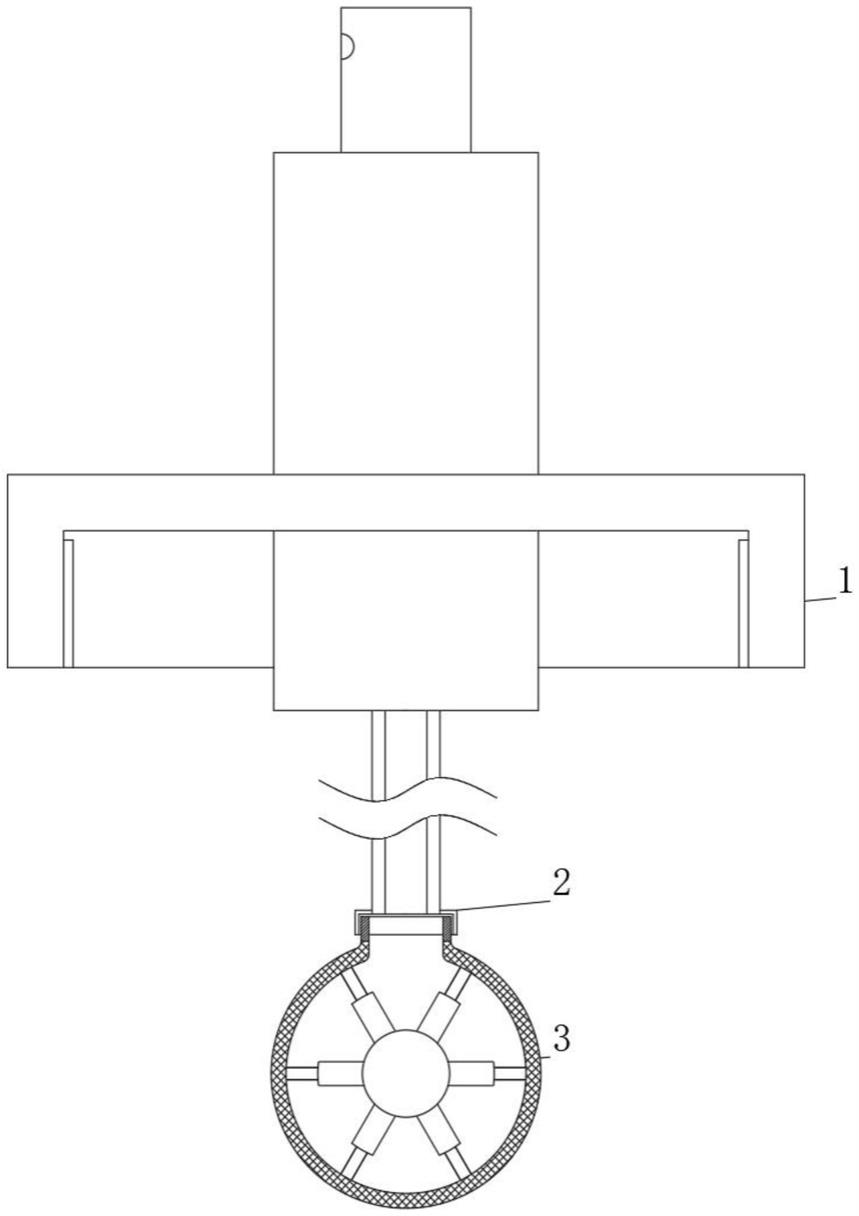
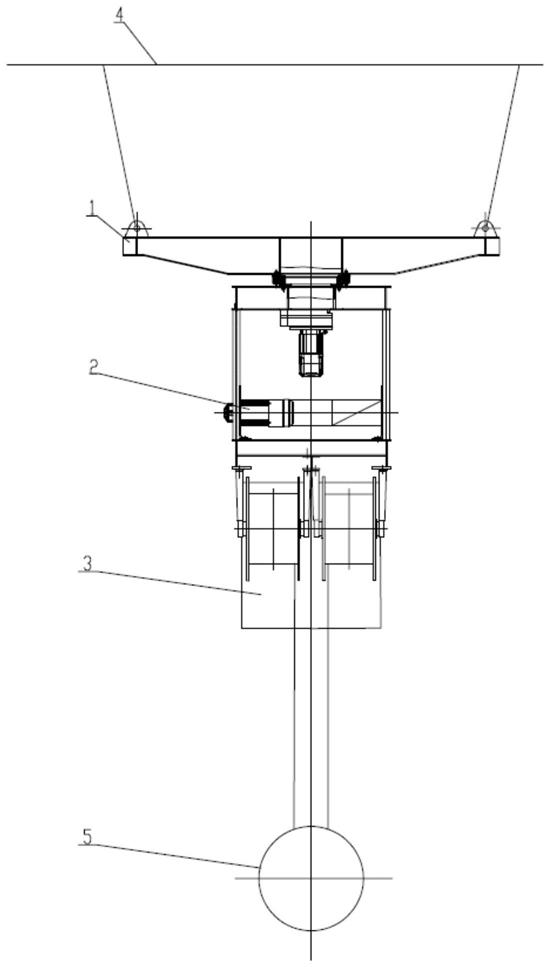
19.图1为本实用新型的设备总图主视图。
20.图2为本实用新型的设备总图侧视图。
21.图3为本实用新型的上部机构主视图。
22.图4为本实用新型的上部机构侧视图。
23.图5为本实用新型的下部机构主视图。
24.图6为本实用新型的下部机构俯视图。
25.图7为本实用新型的下部机构俯视图。
26.图8为本实用新型的回转机构。
27.图中:1、上部机构;2、下部机构;3、电控设备;4、威亚装置;5、吊重。
28.1.1、吊绳;1.2、平台ⅰ;2.1、平台ⅱ;2.2、回转机构;2.3、平台ⅲ;2.4、起升机构;2.2.1、轴承;2.2.2、小齿轮;2.2.3、三合一减速电机;2.4.1、钢丝绳;
29.3.1、电控柜;3.2、电缆卷筒;3.3、电动滑环。
具体实施方式
30.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
31.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本实用新型及其应用或使用的任何限制。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本实用新型的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
33.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本实用新型的范围。同时,应当清楚,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员己知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任向具体值应被解释为仅仅是示例
性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
34.在本实用新型的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制:方位词“内、外”是指相对于各部件本身的轮廓的内外。
35.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其位器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
36.此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本实用新型保护范围的限制。
37.如图1-8所示,本实用新型提供了一种固定于柔性缆索的超轻起重机姿态控制机构包括:上部机构1、下部机构2和电控设备3;
38.上部机构1包括:吊绳1.1、平台ⅰ1.2,下部机构2包括:平台ⅱ2.1、回转机构2.2、平台ⅲ2.3、起升机构2.4;
39.电控设备3包括:电控柜3.1、电缆卷筒3.2、电动滑环3.3;
40.回转机构2.2包括:回转轴承2.2.1、小齿轮2.2.2和三合一减速电机2.2.3;
41.起升机构2.4采用电动葫芦,其包含钢丝绳2.4.1来起吊吊重5。
42.上部机构1与下部机构2通过回转轴承2.2.1相连,上部机构1的平台ⅰ1.2通过吊绳1.1安装在威亚装置4之下;
43.平台ⅰ1.2与平台ⅱ2.1通过回转轴承2.2.1相连,回转机构2.2固定在平台ⅱ2.1上,平台ⅲ2.3上的四根立柱2.3.1与平台ⅱ2.1固定连接(组成框架结构),两套起升机构2.4安装在平台ⅲ2.3上,吊重5上有四个吊点,通过钢丝绳2.4.1分别与两套起升机构2.4相连;电控设备3固定在平台ⅲ2.3上;通过控制两套起升机构2.4的动作可实现吊重5的水平起升和空中翻转,两套起升机构2.4同时起升时,吊重5水平起升;当其中一套起升机构2.4起升,另一套机构2.4下降,吊重5实现空中翻转;由于吊重5与下部机构2相连,下部机构2中的回转机构2.2通过小齿轮2.2.2与回转轴承2.2.1啮合实现旋转,从而使吊重5完成360
°
旋转动作。
44.超轻起重机姿态控制机构的主要受力结构,如平台ⅰ1.2、平台ⅱ2.1和平台ⅲ2.3采用高强度的铝合金材料,采用矩形或方形铝合金管材焊接而成,既能满足强度,又能满足
刚度和局部稳定性的要求,材料的选用大大降低了设备重量。
45.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。