技术特征:
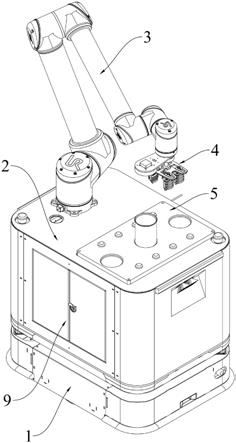
1.一种机械臂复合机器人,其特征在于,所述机械臂复合机器人包括:移动搬运机器人;电器柜,所述电器柜与所述移动搬运机器人可拆卸连接,所述电器柜与所述移动搬运机器人电连接;机械臂,所述机械臂上设置有多个活动关节,所述机械臂的第一端与所述电器柜连接;执行装置,所述执行装置包括机械手和视觉检测相机,所述机械手设置于所述机械臂的第二端,所述视觉检测相机设置于所述机械手上,所述视觉检测相机与所述电器柜电连接;以及,装载工装,所述装载工装设置于所述电器柜上,所述机械手能够从所述装载工装上取放物品。2.如权利要求1所述的机械臂复合机器人,其特征在于,所述电器柜包括柜体以及设置在所述柜体内并相互电连接的机械臂控制器和执行装置控制器;所述机械臂控制器与所述机械臂电连接,所述执行装置控制器与所述执行装置电连接。3.如权利要求2所述的机械臂复合机器人,其特征在于,所述柜体包括框架、顶板以及底板;所述顶板和所述底板均水平设置于所述框架上,所述装载工装和所述机械臂均设置于所述顶板上,所述底板抵接于所述移动搬运机器人上;所述机械臂控制器和所述执行装置控制器均设置于所述框架内;所述机械臂控制器内设置有第一控制电路板,所述机械臂与所述第一控制电路板电连接;所述执行装置控制器内设置有第二控制电路板,所述第一控制电路板与所述第二控制电路电连接,所述执行装置与所述第二控制电路板电连接。4.如权利要求3所述的机械臂复合机器人,其特征在于,所述电器柜还包括壳体,所述壳体设置于所述框架上,所述壳体上一组相对的侧面上均设置有视觉避障相机,所述视觉避障相机与所述移动搬运机器人电连接。5.如权利要求4所述的机械臂复合机器人,其特征在于,所述壳体上还设置有显示屏和多个维护检修口,所述维护检修口上铰接有维护检修门。6.如权利要求1-3任意一项所述的机械臂复合机器人,其特征在于,所述机械手包括连接件、安装架以及多个气动夹爪;所述连接件转动设置于所述机械臂的第二端,所述安装架设置于所述连接件上,多个所述气动夹爪均滑动设置于所述安装架上,所述视觉检测相机设置于所述安装架上。7.如权利要求6所述的机械臂复合机器人,其特征在于,所述气动夹爪包括第一气动夹爪、第二气动夹爪、第三气动夹爪以及第四气动夹爪;所述第一气动夹爪、所述第二气动夹爪、所述第三气动夹爪以及所述第四气动夹爪均包括滑台、限位件、夹指以及滑轨;所述滑轨设置于所述安装架上,所述滑台与所述滑轨滑动连接,所述夹指和所述限位件均设置于所述滑台上,所述限位件能够将所述滑台固定在所述滑轨上,所述夹指与外部气源连接;
所述第一气动夹爪和所述第二气动夹爪的所述滑轨位于第一直线上,所述第三气动夹爪和所述第四气动夹爪的所述滑轨位于第二直线上,所述第一直线和所述第二直线平行。8.如权利要求1-3任意一项所述的机械臂复合机器人,其特征在于,所述移动搬运机器人的底部阵列设置四个万向轮,所述移动搬运机器人的底部还设置有两个驱动轮,所述驱动轮能够驱动所述移动搬运机器人运动。9.如权利要求1-3任意一项所述的机械臂复合机器人,其特征在于,所述移动搬运机器人上设置激光导航系统,所述激光导航系统包括第一导航激光器和第二导航激光器,所述第一导航激光器和第二导航激光器分别与所述移动搬运机器人的一组相对的角一一对应设置。10.如权利要求1-3任意一项所述的机械臂复合机器人,其特征在于,所述机械臂复合机器人还包括示教显示器,所述示教显示器设置于所述电器柜上。
技术总结
本实用新型涉及一种机械臂复合机器人,其包括移动搬运机器人、电器柜、机械臂、执行装置和装载工装。电器柜与移动搬运机器人可拆卸连接,电器柜与移动搬运机器人电连接。机械臂上设置有多个活动关节,机械臂的第一端与电器柜连接。执行装置包括机械手和视觉检测相机,机械手设置于机械臂的第二端,视觉检测相机设置于机械手上,视觉检测相机与电器柜电连接。装载工装设置于电器柜上,机械手能够从装载工装上取放物品。物料送检时通过机械手抓取待检物放置在装载工装上,并通过移动搬运机器人将物料运至检测点,再通过机械手将待检物料放置到检测台,送检过程无需人工参与,降低了人工成本,同时有效地避免了待检物料受污染,提高了产品质量。产品质量。产品质量。
技术研发人员:韩东 金伟华 杭航
受保护的技术使用者:杭州蓝芯科技有限公司
技术研发日:2021.11.30
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。