1.本实用新型涉及起重机测量的领域,尤其是涉及一种起重机轨道承重基础相对沉降的快速测量系统。
背景技术:
2.起重机是指在一定范围内垂直提升和水平搬运重物的多动作起重机械,又称天车、航吊或吊车。
3.起重机,特别是大型起重机的轨道承重基础,由于地质条件或起重机经常性单侧重载吊运,导致局部区域基础沉降大于其他区域,将影响起重机正常安全运行。
4.然而,当前还没有一个有效的手段对两侧轨道称重基础的相对沉降数据进行快速测量,进而无法确保起重机的运行安全。
技术实现要素:
5.本实用新型的目的是:提供一种起重机轨道承重基础相对沉降的快速测量系统,对两侧轨道承重基础的相对沉降数据自动快速测量,实现对轨道承重基础相对沉降的在线监测,确保起重机运行安全。
6.为了达到上述目的,本实用新型的技术方案提供了一种起重机轨道承重基础相对沉降的快速测量系统,包括光信号发射装置、光信号接收装置、以及控制装置;所述光信号发射装置包括第一基座、设于所述第一基座的第一支架、转动连接于所述第一支架的第一杆件、设于所述第一杆件的光信号发射模块、以及设于所述光信号发射模块底部的第一重物块;所述光信号接收装置包括第二基座、设于所述第二基座的第二支架、转动连接于所述第二支架的第二杆件、设于所述第二杆件的光信号接收模块、以及设于所述光信号接收模块底部的第二重物块;所述控制装置输出控制信号至所述光信号发射模块,所述光信号发射模块输出光信号至所述光信号接收模块,所述光信号接收模块输出数据信号至所述控制装置。
7.优选的,所述光信号发射模块设为激光发射模块;所述光信号接收模块设为激光接收模块。
8.优选的,所述第一基座远离所述第一支架一侧设有第一底座,所述第一基座与所述第一底座之间连接有第一可调螺杆;所述第二基座远离所述第二支架一侧设有第二底座,所述第二基座与所述第二底座之间连接有第二可调螺杆。
9.优选的,所述第一底座和所述第二底座均设为磁性结构,或,所述第一底座和所述第二底座均设有磁性结构。
10.优选的,所述第一底座和所述第一可调螺杆均设为多个且对应;所述第二底座和所述第二可调螺杆均设为多个且对应。
11.优选的,所述第一基座和所述第二基座均设为块状;所述第一可调螺杆设于所述第一基座四个端角;所述第二可调螺杆设于所述第二基座四个端角。
12.综上所述,本实用新型包括以下有益技术效果:
13.本实用新型在起重机主梁上设置激光发射装置、激光接收装置和控制装置组成的测量系统,对两侧轨道承重基础的相对沉降数据自动快速测量,实现对轨道承重基础相对沉降的在线监测,确保起重机运行安全。
附图说明
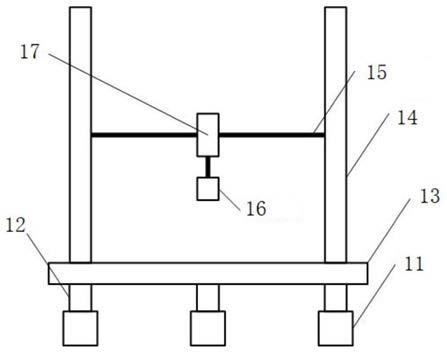
14.图1是本实用新型中激光发射装置的主视图;
15.图2是本实用新型中激光发射装置的侧视图;
16.图3是本实用新型中激光接收装置的主视图;
17.图4是本实用新型中激光接收装置的侧视图;
18.图5是布置激光发射装置和激光接收装置时的示意图;
19.图6是用于展示起重机基础沉降时激光发射装置和激光接收装置之间相对关系的结构示意图;
20.图7是用于展示起重机基础未沉降时激光发射模块和激光接收模块之间相对关系的示意图;
21.图8是用于展示起重机基础沉降时激光发射模块和激光接收模块之间相对关系的示意图。
22.附图标记:
23.11、第一磁性底座;12、第一可调螺杆;13、第一基座;14、第一支架;15、第一转动杆件;16、第一重物块;17、激光发射模块;
24.21、第二磁性底座;22、第二可调螺杆;23、第二基座;24、第二支架;25、第二转动杆件;26、第二重物块;27、激光接收模块;
25.31、起重机主梁;32、起重机基础;33、起重机轨道;34、起重机车轮。
具体实施方式
26.以下结合附图1-8对本实用新型作进一步详细说明。
27.本实用新型实施例公开一种起重机轨道承重基础相对沉降的快速测量系统。
28.本实用新型包括激光发射装置、激光接收装置、以及控制装置。
29.参照图1、图2和图5,激光发射装置包括第一磁性底座11、第一可调螺杆12、第一基座13、第一支架14、第一转动杆件15、第一重物块16、以及激光发射模块17。
30.第一磁性底座11设为六个,且与起重机主梁31上翼缘板表面通过磁性固定;第一可调螺杆12设为六个,且分别对应设置在六个第一磁性底座11上;第一基座13设置在第一可调螺杆12的顶部,其中四个第一可调螺杆12连接在第一基座13下表面四个端角位置,第一基座13的水平位置和高度可通过第一可调螺杆12进行调整;
31.第一支架14设为两个,分别垂直固定在第一基座13两端;第一转动杆件15两端分别与两个第一支架14中部转动连接,且水平设置;激光发射模块17沿水平方向的两侧固定连接在第一转动杆件15的中部,激光发射模块17可通过第一转动杆件15自由转动;第一重物块 16固定连接于激光发射模块17的下端,用于使激光发射模块17保持竖直状态。
32.其中,激光发射模块17接收控制装置的控制信号,并向激光接收装置发射水平激
光。
33.参照图3、图4和图5,激光接收装置与激光发射装置对应,激光接收装置包括第二磁性底座21、第二可调螺杆22、第二基座23、第二支架24、第二转动杆件25、第二重物块26、以及激光接收模块27。
34.第二磁性底座21设为六个,且与起重机主梁31上翼缘板表面通过磁性固定;第二可调螺杆22设为六个,且分别对应设置在六个第二磁性底座21上;第二基座23设置在第二可调螺杆22的顶部,其中四个第二可调螺杆22连接在第二基座23下表面四个端角位置,第二基座23的水平位置和高度可通过第二可调螺杆22进行调整;
35.第二支架24设为两个,分别垂直固定在第二基座23两端;第二转动杆件25两端分别与两个第二支架24中部转动连接,且水平设置;激光接收模块27沿水平方向的两侧固定连接在第二转动杆件25的中部,激光接收模块27可通过第二转动杆件25自由转动;第二重物块 26固定连接于激光接收模块27的下端,用于使激光接收模块27保持竖直状态。
36.其中,激光接收模块27接收来自激光发射模块17的水平激光,并向控制装置发送水平激光照射在激光接收模块27上的相应坐标数据。
37.控制装置电连接激光发射模块17和激光接收模块27;控制装置控制激光发射模块17,向激光发射模块17发送控制信号;控制装置接收来自激光接收模块27的坐标数据,并处理分析得到起重机基础 32的相对沉降数据。
38.参照图1-8,本实用新型的使用方法如下:
39.(1)将激光发射装置通过第一磁性底座11磁性固定在起重机主梁31的一端,将激光接收装置通过第二磁性底座21固定在起重机主梁31的另一端,并使激光发射装置和激光接收装置相向布置;
40.(2)分别调整第一可调螺杆12和第二可调螺杆22,使第一基座13和第二基座23均水平并且距离起重机基础32表面的高度相同;
41.(3)在激光接收模块27上设置坐标系,且坐标系原点a在中心,水平方向为x轴方向,竖直方向为y轴方向;若两侧起重机基础32 无相对沉降,则水平激光应落在激光接收模块27的x轴上,即坐标为(x0,0);
42.(4)将起重机沿着起重机轨道33运行至不同位置并停止;控制装置将控制信号发送至激光发射模块17,控制激光发射模块17向激光接收模块27发送水平激光,并且,控制装置接收来自激光接收模块27的水平激光坐标数据,分别记为(x1,y1)、(x2,y2)
···
(xn, yn);
43.(5)计算每处位置的起重机基础32的相对沉降y
降
=|yn|。
44.以上均为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。