1.本发明涉及飞行器起降设施装备领域,尤其是承载飞行器起飞或降落的窗户式跑道及其使用或操控方法。
背景技术:
2.对于当今航母,阻拦索已然是一种很成熟的技术,但是,阻拦索易受损,因为它必须被飞机尾钩勾住,经受尾钩的暴力摩擦与疯狂拉拽;而且,阻拦索易断裂,因为它往往在单根受力的状态下工作,独自承受飞机滑行时的巨大冲击力。这些缺陷,归根结底来至于结构设计方面的限制:一、僵硬的阻拦索只能与尾钩配对,不合适直接拦截飞机的轮子或起落架,否则会伤害轮子或起落架。二、若将阻拦索换成质地柔软的拦网,虽然让轮子及起落架受伤的可能性减小,但柔软的拦网容易与高速旋转的轮子搅在一起,轮子一旦转不动,就会与地面产生剧烈摩擦,轻则伤胎,重则爆胎。
3.本人在专利号为zl202020168414.6以及申请号为201711326472.6的申请中,提出了采用滑板、轨道、阻拦件、蓄力器、航筏车装置帮助有轮式飞行器或无轮式飞行器实现短距离起降的方法,推出了一种全新的、既能蓄能又能释能的短距离起降跑道。但实现这种跑道的方式方法是多种多样的,而且,要使这类方案得以顺利实施,还有许多细节问题需要研究和解决,还有许多具体环节的操作技术需要进一步优化与完善,特别是对如何进行弹性阻拦及有序化、自动化的安全性操控方面。
技术实现要素:
4.本发明的目的是提供承载飞行器起飞或降落的窗户式跑道及其使用或操控方法,所需解决的主要技术问题是:利用有序的弹性梯次阻拦,提升飞行器在跑道起降过程中的自动化与智能化程度,优化起降安全性能。
5.对于上述问题,本发明采用如下办法解决:
6.承载飞行器起飞或降落的窗户式跑道及其使用或操控方法,包括:
7.起降跑道,
8.所述起降跑道上设有前辅道和后辅道,在所述前辅道与后辅道之间设有运动窗口,所述运动窗口上设有一扇或一扇以上的窗门;所述窗门之下设有弹性装置或承载件或承载道,所述承载道或由轨道或引导竿或滑动装置或滚动装置构成,所述承载道或呈齿条形态;所述前辅道或后辅道的道面与所述窗门的上端面平齐或几乎平齐;所述飞行器可以在所述窗门的上端面降落或滑行或停放。
9.在所述运动窗口内部或窗框的纵向侧边上或者设有储能及/或释能控制机关,该控制机关的结构为:在所述窗门的前方或下方设置顶件,所述顶件上设有或连接有杠杆或轮状物,所述窗门的前方通过弹性物体或伸缩件或控制机关与所述顶件或所述杠杆连接,所述杠杆的阻力臂一端或设有阻齿;在所述运动窗口纵向侧边上或者设有长槽或齿条,长槽中设有滑件,或者是,在所述运动窗口的纵向侧边上设有滑竿,所述滑竿上设有滑套;所
述阻齿能与所述运动窗口侧边的齿条或者与所述承载道上的齿条搭接;所述的动力臂或阻力臂包括动力柱或阻力柱。所述顶件或有弹性。
10.窗门及/或承载件,
11.所述窗门以平置方式在所述运动窗口或承载道限定的范围内活动。
12.所述窗门或由辅助窗门与主载窗门组合而成,所述辅助窗门或呈边框样式,所述辅助窗门的边框上或者设有所述储能及/或释能控制机关。
13.所述承载件或为机动车,所述承载件或承载道上设有动力装置或制动装置或缓冲装置或车轮。所述承载件或与所述窗门合为一体;所述窗门可厚可薄,可呈板状或网格状或框架形。
14.阻拦装置及拦截件,
15.所述阻拦装置至少由拦截件与弹性装置及/或往复控制件及/或控制机关组成,用所述拦截件在所述窗门的上端面拦截或夹持所述飞行器的轮子或尾钩;所述拦截件上设有用以卸除来自所述飞行器轮子的旋转力的可以滚动的物体,所述可以滚动的物体或为轴承或滚筒或滚珠。
16.所述拦截件或者能够从所述窗门的上端面之下朝上伸出,此处所指的伸出包括弹出;或者能从平式状态转变为立式状态,所述的立式,是指拦截件与窗门的上端面呈垂直竖立或倾斜而立的方式,该方式状态与在乒乓球桌面上撑起的拦网相似,所述的平式,是指拦截件平贴于窗门上端面的方式,该方式状态与放倒乒乓球桌上的拦网使之平贴于乒乓球桌面相似;或者能够从窗门的两侧朝窗门的纵向中间线方位靠拢,以夹住或挡住或裹住或勾住飞行器的轮子或起落架。
17.所述阻拦装置或者至少由拦截件a和拦截件b组成。
18.所述拦截件或为翻页式,即采用轮流将所述拦截件a及/或拦截件b由平式状态转变为立式状态或者由立式状态转变为平式状态的方式对飞行器的轮子或起落架设置阻拦或撤销阻拦,其结构或为:转轴或转筒上至少设有页片a与页片b,页片a与页片b通过所述转轴或转筒呈直角或钝角或锐角方式连接,其外形相似于角铁;所述页片a或页片b的页面上设有轴承或滚筒或滚珠或凸状物,所述转轴或转筒或者与弹性装置或电机连接。
19.弹性装置,
20.在所述阻拦装置或窗门上至少设有通过弹性物体或气压及/或液压提供弹力的弹性装置a,所述弹性装置a的一端与所述窗门连接,另一端与所述承载件或运动窗口的侧壁连接;或者是,所述弹性装置a的一端与所述辅助窗门连接,另一端与所述主载窗门连接。
21.在所述承载件或承载道或运动窗口的侧壁上或者至少设有通过弹性物体或气压及/或液压提供弹力的弹性装置b;所述弹性装置b的一端与所述承载件连接,另一端与所述运动窗口的侧壁连接。
22.所述弹性装置a的弹力小于所述弹性装置b的弹力。
23.往复控制件,
24.所述往复控制件可呈管状或块状或条状,所述条状包括杆状或柱状;所述往复控制件上设有单向阀门及/或调节阀门及/或导流管,所述导流管中或者设有电泵或活塞。
25.在所述阻拦装置中或窗门上,设有对所述拦截件或所述窗门通过弹簧及/或气压及/或液压方式进行伸缩或旋转或折叠控制的往复控制件a;在所述承载件或承载道或运动
窗口的侧壁上,或者设有对承载件通过弹簧及/或气压及/或液压方式进行伸缩或旋转或折叠控制的往复控制件b。用所述往复控制件对拦截件或窗门或承载件的往返运动的起始时刻、停止时刻、动静状态、运行位置,运行速度、运行力度进行控制。
26.所述往复控制件或与所述弹性装置合为一体。
27.传感及探测装置,
28.在所述拦截件或窗门或承载件或前辅道或后辅道上设有传感及探测装置。
29.控制机关,
30.在所述阻拦装置及/或窗门及/或承载件及/或前辅道及/或后辅道上,设有需要通过所述拦截件发生位移或旋转或折叠的动作来完成、或者需要通过所述承载件复位的动作来完成、或者需要通过所述窗门或所述承载件出现震动的动作来完成、或者需要通过所述传感及探测装置发出信号或发出指令来完成其开启动作或闭合动作的控制机关。
31.所述控制机关或者通过所述弹性装置或往复控制件中弹力的产生或大小或保持或增减或消失的形态特征来选择或操控其开启或闭合行为。
32.所述控制机关至少分为机械控制式、电能控制式两种。
33.所述控制机关可由多个独立的分机关组合而成,或由一个综控器结合多个分机关组合而成。
34.优选地,
35.所述的使用或操控方法包括:
36.一、在帮助飞行器短距离降落时,
37.首先,让飞行器的轮子碰撞或挂住拦截件a,或者让尾钩勾住拦截件a,使拦截件a发生移位动作;其次,以拦截件a移位的动作来开启所述控制机关从而让所述窗门或承载件由不可移动状态转变为可移动状态。
38.或者是,以所述窗门或承载件进行复位运动返回到初始位置时的惯性动能,电控或触动所述控制机关,使所述控制机关闭合从而让所述窗门或承载件从可移动状态转变为不可移动状态。所述的触动包括直接触动或间接触动。
39.本发明采用此技术手段来解决助降中如何让不同的部件自动关联运动的问题。
40.二、在帮助飞行器短距离降落时,
41.所述拦截件a被飞行器的轮子挂住或尾钩勾住因此发生移位动作,就会触发传感及探测装置或所述控制机关从而让所述拦截件b能够从所述窗门之下或承载件之中向上伸出,或从平式状态转变为立式状态,或从所述窗门的上端面的纵向两侧边朝纵向中间线方位靠拢。
42.本发明采用此技术手段同样是为了解决助降中不同部件自动地相互关联运动的问题。
43.三、在帮助飞行器短距离降落时,
44.利用飞行器被拦截件拦截后,所述窗门立即产生直线运动替代飞行器轮子的旋转运动,窗门与飞行器之间会出现相对静止状态的时段,启动设于窗门纵向两侧边的拦截件朝飞行器的轮子所在位置运动以夹住轮子。
45.所述的使用或操控方法或为:
46.在帮助飞行器降落时,其使用或操作步骤至少包括:
47.用所述窗门及/或承载件承载飞行器的降落或滑行。
48.用所述拦截件从所述窗门的上端面拦截飞行器轮子的同时,先使用设于所述窗门上的弹性装置a中的弹力转移或储存或消耗飞行器的惯性动能,然后使用设于所述承载件及/或承载道及/或运动窗口的侧壁上的弹性装置b中的弹力继续转移或储存或消耗飞行器的惯性动能。
49.用所述往复控制件或动力装置控制所述拦截件或窗门或承载件能否复位、何时复位以及控制已经停稳的窗门或承载件是否还需要继续向前移位。
50.此使用或操控方法为一套能够确保飞行器自动地、安全地降落的技术方案,通过采用多步骤的、环环相扣的技术手段,解决飞行器短距降落的技术问题。
51.优选地,
52.助降时,所述窗户式跑道的使用或操控方法至少由以下步骤组合完成:
53.第一步,让拦截件以立式状态或可钩挂状态呈现在所述窗门之上,或者是让拦截件从所述窗门之中或窗门的下方向上弹出,或者是让拦截件由平式状态转变为立式状态,以此对滑行在窗门上的飞行器实施拦截,使飞行器带动拦截件运动,或者带动所述弹性装置及/或往复控制件一起运动,同时,或者利用拦截件移位的动作,通过控制机关使窗门及/或承载件从固位状态转变为可运动状态。
54.第二步,或者需要通过伸展往复控制件使窗门抵至后辅道旁侧。
55.第三步,或者需要让飞行器后退,使拦截件离开飞行器的轮子或尾钩。
56.第四步,采用让拦截件由立式状态转变为平式状态,或者是将拦截件缩回至所述道面之下或缩回至道面纵向侧边的办法使窗门上的通道畅通。
57.第五步,让飞行器从窗门上的通道经所述后辅道驶离所述跑道。
58.当然,上述的一些步骤可以合并,使之更简化。比如将所述第二步、第三步、第四步合并,使其不分先后,同时进行。
59.助飞时,所述窗户式跑道的使用或操控方法至少由以下步骤组合完成:
60.第一步,让拦截件或助推件抵于飞行器前轮后侧,然后对飞行器制动。
61.第二步,或者需要将拦截件或窗门或弹性装置或往复控制件或承载件制动,然后将往复控制件及/或弹性装置抽成真空或趋近于真空。
62.第三步,启动飞行器发动机。
63.第四步,通过控制机关解除对窗门或弹性装置或往复控制件或承载件的制动控制,允许窗门运动。
64.第五步,解除对拦截件或助推件及飞行器的制动控制,允许拦截件或助推件运动以直接助推飞行器起飞。
65.当然,上述的一些步骤可以合并,使之更简化。比如让所述第二步、第三步不分先后,同时进行。
66.优选地,
67.采用所述往复控制件对所述弹性装置进行储能的方法至少包括:
68.在所述拦截件或窗门或承载件上设置具有气压及/或液压伸缩功能的往复控制件以及设置具有弹簧的伸缩功能的弹性装置,让所述往复控制件和弹性装置一同进行伸展或收缩,一旦致使所述的伸展或收缩的动力不足以维持所述弹簧继续伸展或继续收缩或保持
停稳状态,设于所述往复控制件中的所述单向阀门就会立即自行关闭,使往复控制件腔内的气体或液体无法流动,亦即使往复控制件无法复位,因此,所述弹性装置也就无法复位,从而将所述弹性装置中的弹力暂时储存起来。
69.优选地,
70.所述往复控制件采用大气压力方式参与助力飞行器起飞需经以下使用方法或操作步骤完成:
71.一、对所述往复控制件或拦截件或窗门或承载件制动。
72.二、关闭往复控制件中单向阀门的单向流通功能,使往复控制件的腔内完全处于封闭状态。
73.三、开启所述导流管中的电泵,将往复控制件的腔内抽成真空或趋近于真空。
74.四、让所述拦截件或助推件顶住飞行器前轮的后侧及/或护其左右两侧。
75.五、解除对往复控制件或拦截件或窗门或承载件的制动控制,使往复控制件的一端朝另一端复位,助推承载件或窗门或拦截件运动,或者直接助推飞行器起飞。
76.优选地,
77.用所述动力装置推动承载件或窗门运动从而对飞行器的起飞滑行增大推力。
78.用所述制动装置对承载件的轮子进行制动,或者对所述引导竿的外表、或者对承载道的道面、或者对运动窗口的侧壁直接施以压力获取制动效果。
79.优选地,
80.所述往复控制件或弹性装置的结构为:至少由管a、管b、管c三截不同口径的管状物以套接方式组合而成,管a的口径小于管b,管b的口径小于管c;管a的腔内或者设有弹簧e,弹簧e的一端与管a的一端连接,另一端与管b的一端连接;管b的管壁上或者设有夹层,夹层中或者设有弹簧h,弹簧h的一端与管b的管壁连接,另一端与管c的一端连接;所述弹簧e的弹力与所述弹簧h的弹力不相等。
81.优选地,
82.所述往复控制件或弹性装置上至少设有两截导流管及一个用于控制所述气压及/或液压传动机构中的气体或液体只能单向流动的单向阀门和一个用以控制所述气压及/或液压传动机构中的气体或液体的进出流量的调节阀门。
83.所述阀门或导流管上至少设有用以控制阀门开合或控制所述电泵的开关或控制所述导流管中气体或液体的进出流量或控制所述弹性装置中或往复控制件中气体及/或液体的存量的机械能控件或电能控件或智能控件。在所述传感及探测装置与所述控制机关或智能控件的共同配合下,适时、适当地调整所述阀门打开的口径,控制所述导流管中流进流出的量,就能使飞行器在降落滑行中获得不同的阻力从而控制滑行的速度以及距离。同样,调整好所述弹性装置或往复控制件中气体或液体存量,也能让飞行器在起飞滑行时获得不同的大气压力助推。
84.优选地,
85.设于所述拦截件a上的弹性装置的初始弹力以及过渡弹力都小于设于拦截件b上的弹性装置的初始弹力,设于拦截件b上的弹性装置的过渡弹力或者大于设于承载件或承载道上或运动窗口中的弹性装置的过渡弹力。
86.设于所述阻拦装置上的弹性装置a的初始弹力小于设于所述承载件或承载道上或
运动窗口中的弹性装置b的初始弹力,设于所述阻拦装置上的弹性装置a的终极弹力或者大于设于所述承载件或承载道上或运动窗口中的弹性装置b的终极弹力。
87.优选地,
88.在所述窗门的上端面,设有帮助无轮式飞行器降落的弹性缓冲件及/或托件,在所述弹性缓冲件及/或托件上,或者设有拦截件及/或吸盘及/或滚动装置;所述窗门上或设有往复控制件与所述托件连接。
89.本发明所述的操控方法包括操作与控制方法。所述助降指的是帮助飞行器降落;所述助飞指的是帮助飞行器起飞。所述的承载道或承载件至少包括轨道式、滑板式、水槽式、磁悬浮式。所述引导竿或滑竿包括竿状、杆状、柱状、管状。所述承载件至少包括滑行件、滑板、桥式滑板、框架式滑板、筏式漂移件、机动车。所述动力装置包括燃油、燃气、电力驱动装置。所述拦截件为软质或硬质阻拦物体,软质阻拦物体至少包括绳状、带状、布状、条状、网状物体,硬质阻拦物体至少包括条状、杆状、块状、墙式、框式、栅栏式物体,所述的软质或硬质物体本身或有弹性。所述控制机关至少包括卡扣式、插扣式、锁扣式、嵌套式、阀门式、磁吸式、气吸式的开合装置或触碰式开关,例如电开关。所述弹性装置至少包括由金属物体或非金属物体或气体或液体或阻尼现象形成弹性的装置,金属弹性物体或非金属弹性物体例如是弹簧,所述的弹簧包含螺旋簧、涡卷簧、板状簧、异型簧、空气簧。所述杠杆包括轮状物或偏心轮。所述的连接或相连包括接触式连接。所述的飞行器至少包括导弹、火箭、航空或航天飞机。
90.本发明的有益效果至少包括三个方面:
91.一、拦截会更安全。当飞行器降落到所述窗门上时,窗门或处于不可移动状态,便于飞行器安全着陆。当飞行器的轮子或者尾钩被设于窗门上的拦截件挂住或勾住,触动控制机关,所述窗门及/或承载件就能从不可移动状态迅速转变为可移动状态。
92.翻页式拦截件可以让拦截更简单、更有效。
93.在拦截件上设有球形轴承或滚珠,它能有效化解飞行器轮子对拦截件施加的旋转及扭曲力伤害,防止意外发生。
94.二、操控会更顺畅。用设置有压力传动机构的往复控制件来控制所述拦截件、窗门、承载件进行高速单向运动,能够有效避免运动中出现高噪音、高发热、高磨损现象。
95.三、助推会更有力。所述往复控制件也可以采用大气压力方式参与助力飞行器起飞。
96.本发明将所述窗户式跑道作为一件产品,对实现短距离起降所必须的关键组成部件比如所述的拦截件、窗门、往复控制件的形状、结构以及对整件产品的使用和操控方法进行了创新或改进优化,将所述控制机关及有序运作作为一种核心技术手段与相关跑道部件整合在一起,形成一套有序的相互关联、相互补充、相互监控、相互支持、相互协助的技术对应关系,其目的是:使有轮式飞行器或者无轮式飞行器,只要降落在或滑行到所述跑道,不管其是否为后轮先着地还是前后轮同时着地还是尾钩先着地,都能够被安全拦截,然后自动地顺利停稳,而无需塔台指挥操控,以免除塔台上人为的、由于注意力不够集中、判断失误、指挥失当乃至于信号不良、信息中断等因素引发的灾难。
附图说明
97.为了更加清楚地说明本发明实施的技术方案,以下将对实施例中所需要使用的附图做简单的介绍。应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定或界定。对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它相关的附图,也可以根据这些实施例获得其它相关的实施方式。
98.图1是本发明第一种实施方式窗户式跑道的示意性部分剖面侧视图。
99.图2为图1所示方式沿g-g截面的示意性前视图。
100.图3是图1所示方式的示意性俯视图。
101.图4是图1所示方式关于所述拦网的一个局部的示意性正面视图。
102.图5是图1所示方式关于拦网拦截飞行器后轮的局部剖面示意图。
103.图6是图1所示方式飞行器降落在跑道第一次停稳的示意性侧视图。
104.图7是图1所示方式飞行器降落在跑道第一次停稳的示意性俯视图。
105.图8是图1所示方式飞行器降落在跑道第二次停稳的示意性侧视图。
106.图9是图1所示方式飞行器即将在窗户式跑道起飞的示意性侧视图。
107.图10是图1所示方式飞行器正在窗户式跑道起飞的示意性侧视图。
108.图11是本发明第二种实施方式采用翻页式拦截件拦截飞行器的示意性局部剖面侧视图。
109.图12是图11所示方式正在拦截飞行器后轮的示意性局部剖面侧视图。
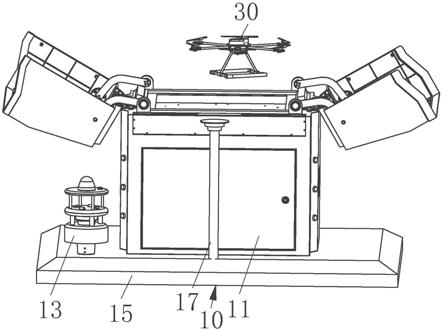
110.图13是图11所示方式飞行器刚降落时的示意性俯视图。
111.图14是图11所示方式飞行器在跑道上被拦截之后的示意性俯视图。
112.图15是本发明第三种实施方式关于无轮式飞行器降落在窗户式跑道的示意性局部剖面侧视图。
113.其中,第一种实施方式:运动窗口1,侧壁2,侧壁3,后辅道4,前辅道5,承载道6,承载件7,引导竿8,弹性装置9a1、9a2、9a3,弹性装置9b1、9b2、9b3,控制机关10a、10b、10c,拦网11a、11b、11c,阻拦装置12a、12b、12c,管13a、13b、13c,控制机关14,卡件15、16,导流管17,电泵18,电控阀门19,往复控制件20,导流管21、22,阀门23,电控阀门24,电泵25,阀门26,电控液压杆27,传感及探测器28,液压杆29,动力臂30,阻力臂31,车轮32、33,动力装置34,制动装置35,辅助窗门36,活动关节37,飞行器38,飞行器38a、飞行器38b、飞行器38c,前轮39,后轮40,传感及探测器41,控制机关42,电机43,卡扣44,储液池45,弹簧46h、47e,弹簧插销48,控制机关49,电机50,控制机关51,卡件52,控制机关53,卡件54,飞行器55,前轮56,消防孔57,轨道58、59,阻拦索60,槽孔61、阻拦索62,传感及探测装置63,槽孔64,阻拦索65、66、67,联接索68、69、70、71,球状轴承72、73、74,合成橡胶层75,球状轴承76,伸缩柱77,液压杆78,缓冲装置79,主载窗门80,拦截件81a、81b,后轮82,滑跃板83。第二种实施方式:窗门201,弹性伸缩管202,连接柱203,后辅道204,电控夹205,前辅道206,翻页式拦截件207,页片208a、209b,滚珠210,弹性装置211,控制机关212,飞行器213,前轮214,后轮215,电机216,运动窗口217,轨道218,左侧边219,右侧边220,长槽221、222,滑件223、224,皮带225、226,动力臂227、228,顶杆229,公式扣件230,母式扣件231,控制机关232,阻力件233、234,阻齿235、236,拉簧237。第三种实施方式:主载窗门301,往复控制件302、303,弹性吸盘304,压簧305,托板306,滚动棒307,前辅道308,连接柱309,飞行器310,尾钩311,防撞缓冲件
312,弹性伸缩管313,右侧边314。
具体实施方式
114.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述,附图中给出了本发明的较佳实施方式,但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。本文提供的这些实施方式的目的是为了便于对本发明的公开内容理解得更加透彻全面。
115.需要说明的是,本文所使用的术语“垂直”、“倾斜”、“水平”、“左”、“右”、“一级”、“二级”、“第一步”、“第二步”和“a”、“b”、“c”以及类似的表述,只是为了说明的目的,并不表示这是唯一的实施方式。
116.除非另有定义,本文所使用的所有技术和科学术语与属于本发明技术领域的技术人员通常理解的含义相同,本文在本说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在限制本发明,本文使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
117.图1是所述跑道的侧视剖面示意图,其中,为便于简述及理解,只对部分部件进行了示意性剖面描述。图2是图1所示实施方式中沿g
‑‑
g截面的示意图。结合图1、图2、图3、图4、图5、图6、图7、图8所示:跑道上设有运动窗口1,运动窗口1左右两侧相对应的侧壁2、侧壁3上分别设有后辅道4、前辅道5,运动窗口1内部底侧的承载道6上设有承载件7,连接于所述侧壁2、侧壁3的引导竿8从承载件7中穿过,用以稳定承载件7的运动方向与运动状态。
118.本实施例中的弹性装置至少分为两种类型,一种是小规格型的、安装于承载件7上端的弹性装置9a1、9a2、9a3,其中弹性装置9a1与控制机关10a和拦网11a组合成了阻拦装置12a;弹性装置9a2与控制机关10b和拦网11b组合成了阻拦装置12b;弹性装置9a3与控制机关10c和拦网11c组合成了阻拦装置12c。另一种是大规格型的弹性装置9b1、9b2、9b3。弹性装置9b1从承载件7的中下部穿过,从形状上看,弹性装置9b1由管13a、管13b、管13c套接而成,管13a的口径最小,其左端与控制机关14连接,控制机关14上设有卡件15和卡件16,其中,控制机关14可以操控卡件15上下伸缩。弹性装置9b1的右端与侧壁3固定式连接,该右端还连接有导流管17,导流管17中设有电泵18和电控阀门19。在承载件7的纵向中段,设有往复控制件20,其右端与侧壁3固定式连接,该右端面设有导流管21和导流管22,导流管21的上端管口设有阀门23,下端管口设有电控阀门24。导流管22的下端管口中设有电泵25,上端管口附件设有阀门26,阀门26由电控液压杆27来控制开启或关闭,电控液压杆27由传感及探测器28来操控伸缩。在承载件7中下段设置的制动装置为杠杆式制动件,当液压杆29收缩,牵引动力臂30向下旋转,阻力臂31就会对引导竿8的上表面施以压力制动。在承载件7的最下端,设有车轮32、车轮33以及动力装置34、制动装置35,动力装置34能给车轮32、33提供行驶动力,制动装置35能对车轮32、33制动。承载件7的顶端与辅助窗门36固定式连接。如图1所示,在承接飞行器降落时,辅助窗门36的右端与侧壁3或者说是与前辅道5搭接,辅助窗门36的上端面与前辅道5的道面等高。主载窗门80可向左、向右运动,但是受到弹性装置9a2、9a3的伸缩控制,因此,弹性装置9a2、9a3中的控制机关10b、10c的上端面的外圈与主载窗门80的下部焊接,形成固定式连接,可这种固定式连接并不影响控制机关10b、10c上端的中心位置里的伸缩柱及其连接的拦网11b、11c分别从槽孔61、64中向上弹出。而控制机关
10a的上端面的外圈与主载窗门80的下部通过轴承或轨道呈接触式连接,使拦网11a及弹性装置9a1能够任意地左右往复运动而不会带动主载窗门80运动。对于上述这段话的理解,可参阅图5所示,控制机关10b的顶端与主载窗门80的下部呈固定式连接,设于控制机关10b上段中心位置里的伸缩柱77及其连接的拦网11b可以从主载窗门80的槽孔61中向上弹起。
119.需要特别说明:图1、图2、图3、图6、图7、图8所示的飞行器38a、飞行器38b、飞行器38c为同一飞行器38降落在前辅道5、抵达主载窗门80上,于不同位置所表现出的不同形态作出的不同标识,这只为便于清楚地进行表述,并非说明此时此刻有多架飞行器在降落。所以,飞行器38a、38b、38c其前轮的标识符号都是39,后轮的标识符号都是40。
120.飞行器38降落在前辅道5的道面上时,其形态如图1中的飞行器38a所示,即前轮39凌空,后轮40在下。当后轮40着陆撞击在前辅道5上,传感及探测器41立刻指令阻拦装置12a上的控制机关10a启动拦网11a向上弹起做好拦截准备。当飞行器向前滑行,其形态如飞行器38b所示,前轮39与后轮40同在滑跃板83上滑跑,到达主载窗门80上端面后,前轮39必然会撞击在拦网11a上带动拦网11a运动,拦网11a的移位,会触碰到控制机关42,控制机关42即会同时进行三项操控:第一项操控,指令控制机关10b和控制机关10c分别启动拦网11b、拦网11c迅速向上弹起,此瞬间,由于所述前轮39刚刚推动拦网11a向前移位,拦网11b就向上弹起,拦网11b就能躲过拦截前轮39而截住后轮40。在弹力设置上,拦网11a所连接的弹性装置9a1的弹力很小,而拦网11b所连接的弹性装置9a2的弹力相对较大,所以,拦截飞行器38b的阻力就会迅速转移到拦网11b上,也就是转移到飞行器38b的后轮40上。第二项操控,启动导流管21下端的电控阀门24将阀门打开,确保一旦需要,储液池45中的油液能够沿着导流管21中箭头所示方向轻松进入到往复控制件20的腔内,以便往复控制件20能够轻松伸展。第三项操控,启动导流管17中的电控阀门19将阀门打开,确保一旦需要,储液池45中的油液能够沿着导流管17下端管口的箭头所示方向轻松进入到弹性装置9b1的腔内,以便弹性装置9b1能够顺利伸展。
121.图2是图1所示实施方式沿g
‑‑
g截面的示意图,如图所示,从承载件7的正前方来看,在承载件7的体中,设有弹性装置9b1、9b2、9b3,其作用包括:如果能够确定辅助窗门36上承载的飞行器38b是一架轻型飞机,则可先让控制机关51将卡件52向下移动至合适位置,使卡件52不会挡住承载件7运动,同样,也让控制机关53将卡件54向下移动至合适位置,使卡件54不会挡住承载件7运动,只留下弹性装置9b1上的卡件15挡住承载件7运动,利用弹性装置9b1中的弹簧46h、47e就足以耗尽所述轻型飞机的惯性动能。同理,如果能确定所承载的是重型飞机,则让卡件52、54都向上弹起挡住承载件7运动,让弹性装置9b1、9b2、9b3中设置的弹力一起来转移、储存或者说是消耗该重型飞机的惯性动能。
122.图3为图1所示实施方式的示意性俯视图,如图所示,整个起降跑道宛如在后辅道4与前辅道5之间设置了一面窗户,辅助窗门36可以在运动窗口1所限定的区域范围内左右运动,辅助窗门36呈边框样式,其四面边框围住了主载窗门80。辅助窗门36如同设置在承载件7上端的一个小的运动窗口,轨道58、59设置在辅助窗门36之中,主载窗门80可以沿着轨道58、59进行左右往复运动。当飞行器38在前辅道5降落,其形态如飞行器38a所示,其后轮40撞击到前辅道5上,被传感及探测器41感知,即指令阻拦装置12a上的控制机关10a启动拦网11a向上弹起做好拦截准备。飞行器38a沿滑跃板83的道面滑行,进入到主载窗门80时呈飞行器38b形态,其前轮撞击到拦网11a,带动拦网11a运动,拦网11a触碰控制机关42,控制机
关42即指令控制机关10b和控制机关10c分别启动拦网11b、拦网11c分别从槽孔61、64中迅速向上弹起,拦网11b拦截后轮40,拦网11c拦截拦网11a以及前轮39,主载窗门80立即同时压缩弹性装置9a1、9a2、9a3沿轨道58、59滑行,当主载窗门80的左侧边经过传感及探测装置63的上方,参见图1,传感及探测装置63立即指令电机43启动,以打开卡扣44使卡扣44脱离对控制机关10b的连接控制,使辅助窗门36亦即使整个承载件7从固位状态变成可移动状态,使飞行器38b能够通过拦网11a、11b、11c以及主载窗门80、辅助窗门36带动整个承载件7运动,其运行形态可同时参见图7所示,该图中,主载窗门80的左侧已经贴近辅助窗门36的右边框,而且,主载窗门80已经远离前辅道5。此外,如果飞行器38b在飞行中已经受伤起火,在拦网11b拦住所述后轮40的同时,消防喷头喷管可以立刻从消防孔57中向上伸出喷液喷粉灭火,使飞行器38b的降落滑行还未停稳,已能得到及时救援。
123.在此应当说明:为了不至于在视觉上造成错觉,图1中主载窗门80的下方,未将如图3所示的轨道59绘入,也未将消防孔57中可以上下伸缩的喷头喷管等器械绘入。
124.图4是拦网11a、11b、11c的结构图,图中所示的仅为所述拦网的一个局部的示意性正面视图。5根钢质阻拦索60、62、65、66、67通过联接索68、69、70、71并联以形成网状,在阻拦索60上,串联有多个球状轴承72、73、74,球状轴承72上设有耐磨耐撞耐高温有弹性的合成橡胶层75。结合图3、图5所示,拦网11b通过伸缩杆77可以从主载窗门80的槽孔61中向上弹起拦截所述后轮40,当后轮40以大箭头所示方向旋转,撞上拦网11b,触及球状轴承76,球状轴承76也会以小箭头所示方向旋转,从而抵消后轮40对拦网11b产生的扭曲及摩擦力伤害,与此同时,受到后轮40的撞击,拦网11b及其所连接的弹性装置9a2会带动主载窗门80连同后轮40一起向左侧方向退缩,当这种退缩达到一定的速度之后,后轮40将不再旋转,因为后轮40的惯性动能已经转移到主载窗门80和弹性装置9a2上,弹性装置9a2的回缩以及主载窗门80的直线运动已经直接与飞行器38的惯性动能对接,因此可以省略掉后轮40进行旋转运动这一中间环节,这是物体进行力的转换运动中出现的物理现象。
125.结合图1、图6所示,飞行器38从图1中的飞行器38b的位置抵达到图6中飞行器38c所示的位置时,承载件7的运动,带动了往复控制件20的伸展,储液池45中的油液会顺着导流管21源源不断地进入到往复控制件20的腔内。同时,因为弹簧46h的弹力小,管13b首先移位、伸展,该弹力可视为弹性装置9b1的初始弹力。等到管13b伸展到已无法再伸展,管13a就会带动弹力最大的弹簧47e继续伸展,该弹力可视为弹性装置9b1的终极弹力。此时,储液池45中的油液会顺着导流管17源源不断地进入到弹性装置9b1的腔内以使弹性装置9b1能够持续伸展,直至把飞行器38c的惯性动能转移、消耗殆尽的一瞬间,因为飞行器38c向前行进的惯性动力已经小于弹性装置9b1中弹簧47e的弹性复位力,弹性装置9b1就会拉动承载件7回缩,但是,又因为往复控制件20中的阀门23受到回流的油液压力而自动把导流管21的上端管口堵住了,而且,导流管22中的阀门26也处于关闭状态,这样,油液无法回流,往复控制件20也就无法收缩,飞行器38c及承载件7即停稳。详见图6,通过传感及探测器28以及传感及探测器41对承载件7的运动速度、行进距离进行跟踪探测和实时调整控制,当飞行器38c停稳之时,承载件7与后辅道4之间会留有一段安全距离,所以,当传感及探测器28感知到承载件7已经沿设定方向由急速运动状态转变为停止状态,就会指令电控液压杆27伸展,推动阀门26打开,同时启动电泵25将储液池45中的油液继续输送到往复控制件20腔内,使往复控制件20自动地继续伸展,如图8所示,当承载件7贴近后辅道4时,卡件16被设于侧壁2中的
弹簧插销48卡住,当传感及探测器28感知到卡件16已经与插销48扣接,就会立刻关闭电泵25停止输液,同时指令电控液压杆27收缩,使阀门26关闭,因此,承载件7又会再一次停稳。接着,传感及探测器28给控制机关10b、10c发出信号,由控制机关10b、10c控制拦网11b、11c分别从主载窗门80上预留的条形槽孔61、64中向下回缩,然后,给控制机关10a发出信号,使弹性装置9a1带动拦网11a也运动到条形槽孔64位置,让拦网11a也向下回缩,这样,就清除了主载窗门80上端的所有阻拦物,飞行器38c就可以通过启动自身的发动机或者通过牵引车牵引,经后辅道4的道面驶离。然后,参见图2和图8,让往复控制件20收缩,把辅助窗门36、主载窗门80以及整个承载件7带回起始位置,独留下已经蓄好弹力的弹性装置9b1卡在侧壁2上,形成弹匣式,以备需要帮助弹射飞行器起飞时使用。而如果需要重新帮助飞行器降落,可选用9b2及/或9b3提供弹性阻力。
126.所述的传感及探测器28、电控液压杆27、阀门26合成了一组简单的智能控件。同时,传感及探测器28与阀门26也组合成为了一种控制机关,它能根据所述承载件7上的弹性装置9b1的弹力是否正在持续增减或者已经停止增减的情况指令电控液压杆27伸缩从而使阀门26开合,这与权利要求书中所述的控制机关通过弹性装置或往复控制件中弹力的产生或大小或保持或增减或消失的形态特征来选择或操控其开启或闭合行为的权利要求对应。
127.在本实施例中,一旦飞行器38a降落的冲击力过大,或者是所述的往复控制件20、弹性装置9b1出现操作失控,参见图6和图2,传感及探测器28可以立即启动液压杆29收缩,通过牵引动力臂30、阻力臂31转动,对引导竿8的上表面施以压力制动,或者是通过所述制动装置35对车轮32、33制动。所述承载道6的上端面也可以表现为齿条形态,所述车轮32、33则可以表现为齿轮形态。在本实施例中,弹性装置9a1、9a2、9a3的内部结构都与弹性装置9b1或往复控制件20的结构相似,都同时具备弹性伸缩和气压及/或液压传动功能,属于将往复控制件与弹性装置合为一体的方式,因此,与权利要求书中所述的往复控制件a对应,而上述的往复控制件20则与权利要求书中所述的往复控制件b对应。
128.在本实施例中,如果拦网11a直接拦截到的是飞行器38a的后轮40,拦网11a的移位同样会触动控制机关42,控制机关42同样会立刻进行所述的三项操控,使拦网11b、11c向上弹起,因而使拦网11a迅速与拦网11c叠合,带动主载窗门80、辅助窗门36以及承载件7移动,使弹性装置9b1能够对承载件7进行弹力制动,控制其在预设的行程内停稳。也就是说,拦网11a无论拦截到所述前轮39还是后轮40,都不会影响飞行器38的正常降落。
129.倘若飞行器38a着陆时的动力或惯性动能过大,传感及探测器28或传感及探测器41会启动电控阀门24将其阀门口适当关小,使油液从导流管21进入到往复控制件20腔内的流量减少,这样,承载件7获得的阻力增大,以此调控承载件7的运动速度及运行距离,也就是调控飞行器38着陆之后的运动速度与运行距离。
130.飞机的轮子,是整架飞机上最耐撞耐磨的地方,当几十吨、愈百吨的飞机以每秒70米、上百米的速度俯冲到地面的时候,首当其冲的是轮胎,而且,在撞击的时候,地面是不会退却的,只有飞机的起落架帮助减震,在如此恶劣的情况下,轮胎尚能保持良好,反复使用,可见,所述轮胎及起落架的抗撞能力有多优秀。因此,采用拦截件直接对轮胎进行阻拦,应该才是扬长避短的最佳选择。
131.经研究发现,用拦截件帮助飞行器实现短距降落,首先有一个无法回避的关键问题,就是所述轮子39、40高速转动运动产生的破坏力问题。本实施例在拦网11a、11b、11c上
设有轴承,轴承上设有防撞的橡胶保护层,因此,能将所述轮子39、40的旋转力有效卸除。其次,还需满足三个前提条件:一、拦截件不能被固定不动。二、飞行器的轮式旋转运动要用承载物体的直线式运动来替代。三、必须取得缓冲装置或储能装置的支持。本实施例中,采用所述主载窗门80充当所述承载物体,使用弹性装置9a1、9a2、9a3、9b1、9b2、9b3让拦网11a、11b、11c及主载窗门80都能够活动的同时还提供缓冲以及储能支持。从技术层面分析:当拦网11a率先发起阻拦,其弹性阻力非常弱小,这对于具有几十吨愈百吨撞击力的飞行器38来说,该阻力九牛一毛,绝不足以致前翻、致侧翻、致偏移,何况拦网11a实施阻拦时并非硬顶,也无力硬顶,甚至一触即溃,轻轻碰到所述前轮39便会被前轮39推动后移。紧接着,拦网11b乃至11c继续追加阻拦,但弹性装置9a2、9a3所提供的阻力仍然不大,该操作主要是为了对飞行器38的后轮40进行拦截,同时对前轮39进行再阻拦,确保拦截的力达到平衡和轻重有序。
132.在拦网11a、11b、11c之下设置主载窗门80的目的,就是为了让弹性装置9a1的弹力显著区别于弹性装置9b1的弹力,使飞行器38刚受拦截时,有一股弱小的、安全的阻力来帮助完成一种运动向另一种运动的转换,即让飞行器的降落由轮子的旋转运动转移给主载窗门80变为直线滑行运动。此时,若还有必要,可趁该拦截操作完成后,飞行器38与主载窗门80之间会形成一种相对静止状态的时机,参见图3以及图1所示,让拦截件81a、81b从主载窗门80的上端面两侧朝飞行器38b的后轮40所在位置迅速靠拢,以夹住后轮40,使飞行器38从此保持稳定状态。
133.然后,才会让弹性装置9b1参与阻拦,其因弹性伸展逐渐释放由小变大、由弱渐强的阻力,最终迫使承载件7停稳,也就是迫使飞行器38停稳。理论证明,只要阻力的使用是平滑、正面、直线式、由弱渐强且在适当的时段内完成,飞行器28的短距离降落就不会有风险。鉴于飞行器28的重量,少则十吨二十吨,多则一百两百吨,有这等重量压着,当飞行器28着陆后进入滑行阶段,从理论上,就无法计算和推断出飞行器28被拦网11a、11b、11c拦截之后,还能挣脱阻拦,拽翻阻拦,撞断阻拦,逃之天天的后果,因为上述拦网都采用卸力式连续直线后退以及平滑且逐渐增大阻力的方法,更重要的是着重对后轮40实施拦截,整个过程如同对后轮40缓慢刹车。在承载道6的定向约束下,在所述轨道58、59以及弹性装置9a1、9a2、9a3、9b1和往复控制件20定向伸缩的共同制约下,在拦网11b、拦截件81a、81b同时拦截后轮40的前方及两侧的情况下,飞行器28着陆后的冲击力方向自始至终都不可能发生偏移。除非阻降的滑距过短,阻力骤然剧增!但是,对于轻型、重型飞行器分别需要设定多长的滑行距离才最合适,这可以通过计算和实验数据合理设定。
134.如图9所示,倘若要帮助飞行器55起飞,首先,要启动液压杆78伸展,将滑跃板83通过转动关节37使右侧升起至合适高度形成斜坡,然后启动液压杆27伸展以牵引阀门26打开,启动导流管21下端的电控阀门24关闭,再启动导流管22下方的电泵25,把往复控制件20中的油液抽出,使往复控制件20的腔内趋于真空。同时,让飞行器55停于控制机关10b的上方,让拦网11b充当助推件顶在飞行器55的前轮56的后侧,让飞行器55启动其自身的制动件对前轮56、后轮82进行制动控制,使飞行器55保持稳定状态,再让飞行器55启动其发动机,一切准备停当,启动控制机关49,通过电机50使弹簧插销48上提,解除对卡件16的制动控制,使往复控制件20由于其腔内趋于真空所产生的大气压力、使弹性装置9b1腔内的弹簧47e、46h所储存的弹力,共同推动承载件7向右侧方向快速运动,参见图10,当主载窗门80即
将接近前辅道5,传感及探测器41会立刻给飞行器55发出信号,指令其解除其自身的制动件对前轮56、后轮82的制动控制,同时,指令控制机关10b、10c启动弹性装置9a2、9a3即刻伸展,在主载窗门80运动到前辅道5的左侧边完成对接时,飞行器55通过其自身的发动机动力,就可以沿着滑跃板83形成的斜坡轻松滑跃起飞。此时,所述控制机关10b通过惯性运动力与所述卡扣44对接,使卡扣44自动地重新扣住控制机关10b,让辅助窗门36处于不可移动状态。设置在辅助窗门36下方的缓冲装置79能够帮助高速运动的承载件7缓冲减震以防撞坏侧壁3。另外,如果需要,承载件7下方设置的动力装置34也可以通过转动车轮32、车轮33随时对承载件7提供助推动力。
135.如图11所示,窗门201的右端通过电控夹205与前辅道206连接,窗门201的下方设有弹性伸缩管202,弹性伸缩管202的右端与前辅道206连接,其左端的连接柱203的上端面与窗门201的下端面连接。
136.在窗门201上,设有翻页式拦截件207,所述拦截件207上设有页片208a、209b,页片208a与页片209b呈直角方式连接,页片209b的一面设有滚珠210,拦截件207的转轴与弹性装置211连接,弹性装置211起到减震作用。在拦截件207上设有能够主动调整页片208a、209b转动方向的电机216。所述窗门201上设有控制机关212。
137.页片208a与权利要求书中所述的拦截件a对应,页片209b与权利要求书中所述的拦截件b对应。
138.当飞行器213降落在前辅道206,滑行进入到窗门201的上端面,其前轮214碰到页片208a之后,页片208a会被动地朝左方向转动,当前轮214碾压拦截件207时,弹性装置211会引导拦截件207向下弹性回缩,使前轮214如履平地,此时,页片208a由立式状态转变为平式状态。参见图12,随着前轮214向前推动页片208a旋转,页片209b立刻翘起拦截后轮215,此时,页片209b由平式状态转变为立式状态。该操作,无论飞行器213的运动速度有多快,页片209b都能机械地及时翘起对后轮215进行拦截。在前轮214碾压页片208a的同时,页片208a按压控制机关212启动电控夹205将夹口张开,使窗门201脱离与前辅道206的连接,这样,当后轮215撞击页片209b的时候,窗门201就可以通过推动弹性伸缩管202伸展而沿着轨道218所引导的方向朝前运动。当后轮215撞击页片209b时,设于页片209b上的滚珠210能够将后轮215的旋转力卸去,直至飞行器213的惯性动能被耗尽而停稳。这时,如果需要解除页片209b对后轮215的阻拦,可让飞行器213先后退一小段距离,然后启动电机216使页片209b朝顺时针方向旋转,由立式状态变回平式状态,再让后轮215从拦截件207上通过即可。在窗门201上,可以设置两副或两副以上像拦截件207一样的翻页式拦截件。
139.图13和图14是图11所示实施方式的俯视图,结合图13、图14与图11所示,在后辅道204与前辅道206之间设有运动窗口217,在运动窗口217上设有所述储能及/或释能的控制机关,该控制机关的结构为:在运动窗口217的左侧边219和右侧边220上分别设有长槽221和长槽222,长槽221、222中分别设有滑件223、224,滑件223、224上分别设有皮带225、226与窗门201连接,在滑件223、224上设置的动力臂227、228与顶杆229呈活动式连接,顶杆229上设有公式扣件230,窗门201的前端设有可以伸缩的母式扣件231,公式扣件230与母式扣件231配对可进行连接或分离操作。所述左侧边219的内侧和右侧边220的内侧都设有齿条,滑件223、224上设置的阻力件233、234上分别设有阻齿235、236。在实际应用中,所述长槽222可以用滑竿代替,滑件223用滑套代替;所述公式扣件230、母式扣件231以及顶杆229、滑件
223、224都可以设在所述窗门201的下方,因此,当窗门201与后辅道204靠拢在一起的时候,不影响窗门201上端面的道面畅通。
140.当窗门201处于待降状态时,受到拉簧237的拉力作用,窗门201与前辅道206贴靠在一起,因为顶杆229受到窗门201的拉力,带动动力臂227、228和阻力件233、234转动,使阻齿235、236卡住所述的左侧边219的内侧和右侧边220的内侧上的齿条,使整个窗门201处于不可移动状态。
141.当飞行器213降落到前辅道206上,滑行进入窗门201,其前轮214推动页片208a向前转动,压迫控制机关212解除电控夹205对前辅道206的连接控制,同时使页片209b翘起挡住后轮215从而带动窗门201以及顶杆229向前运动,顶杆229的移位会通过动力臂227、228带动阻力件233、234朝前方转动,使阻齿235、236解除对所述左侧边219的内侧齿条和右侧边220的内侧齿条的控制,这样,窗门201便会载着飞行器213沿轨道218所限定的方向朝前运动,牵引拉簧237以及弹性伸缩管202伸展,消耗飞行器213的惯性动能。
142.当飞行器213的惯性动能被耗尽,受拉簧237的拉力作用,窗门201及顶杆229会后退,但是,顶杆229会带动阻齿235、236分别再次卡住所述左侧边219的内侧齿条和右侧边220的内侧齿条,阻止窗门201运动,从而使拉簧237伸展后的弹力得以自动储存。
143.当需要借用拉簧237以及弹性伸缩管202所储存的弹力助推飞行器起飞,可通过控制机关232解除公式扣件230与母式扣件231之间的卡扣连接,使滑件223、224因为设于其内部的弹簧的旋转力带动阻力件233、234转动,使阻齿235、236解除对所述左侧边219的内侧齿条和右侧边220的内侧齿条的控制,让窗门201得以运动,完成了拉簧237以及弹性伸缩管202的一次自动释能助推过程。而且,窗门201的运动,会通过皮带225、226以一定的距离带动滑件223、224和顶杆229一块运动,便于一旦需要,伸长母式扣件231,仍能与公式扣件230扣接。
144.本实施例中,所述窗门201与承载件合成了一体,窗门201就是承载件,承载件就是窗门201。轨道218就是承载道。弹性伸缩管202与权利要求书中的弹性装置a对应,拉簧237与权利要求书中的弹性装置b对应。
145.如图15所示,主载窗门301的下方设有弹性伸缩管313,弹性伸缩管313的右端设有连接柱309,连接柱309的上端面与主载窗门301连接,连接柱309的右侧设有防撞缓冲件312,防撞缓冲件312的右边为前辅道308。主载窗门301的上端面设有压簧305,压簧305的上方设有托板306,托板306与主载窗门301之间连接有往复控制件302、303,托板306的上端面设有滚动装置,该滚动装置为用橡胶包裹而成的滚动棒307。当无轮式飞行器310降落到前辅道308的上方时,放下尾钩311勾住托板306的右侧边314,飞行器310就会带动主载窗门301推动弹性伸缩管313回缩,同时,飞行器310向下落,压迫滚动棒307、托板306,使压簧305进行弹性折叠,因此,也挤压往复控制件302、303缩短,但是,往复控制件302、303缩短之后,若不经过刻意地去启动其伸展机关,它们就不会伸展,其工作原理,可参阅图1、图6中对往复控制件20的描述。这样,落下的飞行器310也就不会出现反弹,以此减少或免除震动的频率。与此同时,可以伸缩的弹性吸盘304从托板306的对应位置预留的孔中穿过托板306去吸住飞行器310底部,确保飞行器310的稳定。往复控制件302、303以及弹性吸盘304和滚动棒307的共同作用,能够让无轮式飞行器310降落在窗门301上之后,不会出现摇摆、震颤、倾滑之类的有害动作。
146.本发明所述的跑道之所以用窗户式命名,目的只为能够简洁地将跑道中各部件及其组成结构、使用或操控方法叙述清楚。所述跑道也可表述为重叠式跑道,顶层的辅助窗门36和主载窗门80为活动式跑道,中间的承载件7为过渡式跑道,底层的承载道6为固定式跑道,呈现了三级或者也可以呈现出两级以及拓展为呈现出四级甚至更多级别的立体式跑道组合。
147.上述窗户式跑道,可将目前陆地上普遍使用的起降跑道缩短,因为它在助降时,采用弹性阻拦系统及/或弹性储能蓄力系统,在助飞时,采用弹性的包括弹簧、大气压力在内的释能释力装置,其效果,在刚开始的试行阶段,即便只能将当前陆地上常见的3千多、4千米跑道缩短至2千多米或1千米,也应视为进步。所述的窗户式跑道,建造成本虽比当下通用的起降跑道高,但它省地,助飞时节能,助降时更安全,且起降效率更高。
148.以上实施例仅表达了本发明的几种实施方式,其描述已较为具体和详细,但本发明的保护范围不限于以上附图及其实施例。应当指出的是,对于本领域的普通技术人员,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围,因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。