1.本发明属于建筑材料检测技术领域,具体涉及一种建筑板材的抽样自动化质量检测方法。
背景技术:
2.建筑用板材,如木质地板在生产过程中,每批产品在生产过程中需要对其进行检测,以监测产品的实时质量,现有的生产过程中产品质量的监测方法为,在间隔的时间段内,在流水线上随机抽取若干完成生产的地板,然后对地板的密度,以及各项性能进行检测,包括防水性能等;然而现有检测流程中,对地板的各项检测都需要人工一项项的通过不同的设备测得,操作较繁琐,且检测人员需要定时去检测,若由于检测人员的疏忽,忘记了检测时间,则容易造成次品流入后道工序中,从而影响产品的整体质量;
3.现有测量板材的防水性能时,需要设置喷水机构对板材喷水后,查看板材的防水性能;因此需要另外设置喷水装置,增加了设备的投入。
技术实现要素:
4.本发明提出一种建筑材料自动化质量检测方法,以解决现有技术存在的问题。
5.本发明采用以下技术方案予以实现:
6.一种建筑材料自动化质量检测方法,包括以下步骤:
7.步骤一:取经检测质量合格的建筑板材,获得对比数据,包括建筑板材的标准密度值以及板材的防水性能标准评价曲线;其中,分别通过自动密度值测量机构及微波信号检测机构获得所述标准密度值和所述防水性能标准评价曲线;
8.步骤二:通过第一自动取料机构取生产线上待检测的若干建筑板材作为抽样;分别通过自动密度值测量机构获得各抽样的实际密度值;
9.步骤三:将各抽样测得的实际密度值与标准密度值进行对比;若其中有一抽样的实际密度值不在标准密度值的阈值内;则直接判定该批抽样的检测不合格,发出警报,工作人员检测板材的各道工序或重新抽样检测;若各抽样的实际密度值均在标准密度值的阈值内;则进入步骤四;
10.步骤四:通过第二自动取料机构将完成密度检测的抽样输送至微波信号检测机构处,通过微波信号检测机构获得各抽样的防水性能实际评价曲线;将防水性能实际评价曲线与防水性能标准评价曲线进行对比;若防水性能实际评价曲线在防水性能标准评价曲线的阈值内;则判定该抽样检测合格;否则判定抽样检测不合格;
11.步骤五:经步骤四检测的抽样都合格时,判定该批抽样检测合格;若其中有一抽样的检测不合格,则判定为不合格,发出警报,工作人员检测板材的各道工序或重新抽样检测。
12.优选的,步骤一中通过自动密度值测量机构获得建筑板材的标准密度值的方法,包括如下子步骤:
13.a1:取若干组经检测质量合格的建筑板材,自动密度值测量机构包括自动称重组件以及自动体积测量组件,通过所述自动称重组件分别对若干组建筑板材进行称重,称重后获得各组建筑板材的质量;
14.a2:通过自动体积测量组件测量各组建筑板材的体积,计算得到各组建筑板材的密度,取各组密度的平均值得到标准密度值。
15.优选的,获得防水性能标准评价曲线、防水性能实际评价曲线以及判断建筑板材抽样的防水性能是否合格的方法,包括如下子步骤:
16.b1:将检测质量合格的建筑板材浸入水中,浸泡时间t后,取出,以板材的中心点为基准点;呈环形排列设置向外延伸的若干标准测量面;在标准测量面上取若干点测得微波信号变化参数,形成对应于每个标准测量面的标准微波信号变化曲线作为防水性能标准评价曲线;
17.b2:将待检测建筑板材的抽样浸入水中,浸泡时间t后,取出,以待检测抽样的中心点为基准点;呈环形排列设置向外延伸的若干实际测量面;在实际测量面上取若干点测得微波信号变化参数,形成对应于每个测量面的实际微波信号变化曲线作为防水性能实际评价曲线;
18.b3:取抽样上其中一个实际测量面的实际微波信号变化曲线;将其与对应标准测量面的标准微波信号变化曲线做对比;若实际微波信号变化曲线在标准微波信号变化曲线的阈值内,则判定该抽样在该实际测量面范围内的防水性能符合标准;依次将各个实际测量面的实际微波信号变化曲线;与对应标准测量面的标准微波信号变化曲线做对比;若每个实际测量面的防水性能均符合标准时;则判定该抽样的防水性能符合标准;
19.b4:若抽样的某个实际测量面的防水性能不符合标准时,则做出标记;由于每个实际测量面上设置若干的测量点,标记可以对应到某个测量面上的某个测量点,因此检测人员根据该标记可以快速得出抽样板材内部不符合防水性能的部位;进行分析改进。
20.优选的,包括设置于流水线侧边的检测平台,所述检测平台上依次设置有自动称重组件、自动体积测量组件以及微波信号检测机构;还包括第一自动取料机构以及第二自动取料机构,所述第一自动取料机构将待检测建材由自动称重组件输送至自动体积测量组件,第二自动取料机构将完成体积测量的待测板材输送至微波信号检测机构。
21.优选的,所述自动称重组件包括承重平台,所述承重平台上设置有重量传感器;通过所述重量传感器测得待称重板材进行称重,自动体积测量组件包括箱本体;所述箱本体侧部设置有一透明窗口;所述透明窗口由箱本体的顶边延伸至箱本体的底边上;透明窗口的外部设置有安装壳体,安装壳体内设置有ccd图像扫描机构,所述ccd图像扫描机构包括第一驱动电机、主传动齿轮、从动传动齿轮、齿条以及ccd扫描头组件;所述第一驱动电机的壳体固定在安装壳体的右侧壁外侧,其输出轴穿过所述安装壳体的右侧壁端部固定有所述主传动齿轮;所述从动传动齿轮设置于所述主传动齿轮的正下方,所述齿条传动连接所述主传动齿轮以及从动传动齿轮,ccd扫描头组件固定在齿条的其中一侧上;ccd扫描头组件在透明窗口顶边以及底边之间上下运动,扫描获得透明窗口内液体的图像。
22.优选的,第一自动取料机构包括设置于检测平台上方的安装梁,所述安装梁上固定有一滑轨;所述滑轨上设置有第一滑块所述第一滑块上固定有第一气缸,所述第一气缸的活塞杆上设置有第一气动吸盘;所述第一滑块通过第一连接块连接有第二气缸,第二气
缸的缸体固定在安装梁上;
23.第二自动取料机构包括滑动连接在滑轨上的第二滑块,所述第二滑块上固定有第三气缸,所述第三气缸的活塞杆上连接有第二驱动电机,所述第二驱动电机的输出轴上连接有第二气动吸盘;
24.所述微波信号检测机构包括设置与第二滑块底部的第一安装板,以及设置在检测平台上的第二安装板;所述第一安装板的底面上设置有若干间隔排列的微波发射器;所述第二安装板的顶面上设置有与微波发射器一一对应的若干间隔排列的微波接收器;还包括位置传感器发射器以及位置传感器接收器,所述位置传感器发射器设置在第一安装板的末端,所述位置传感器接收器设置在第二安装板的末端,当位置传感器接收器接收到所述位置传感器发射器发射的信号时,则所述微波发射器及微波发射器实现一一对应。
25.优选的,通过自动体积测量组件测量待测板材的体积的方法,包括如下步骤:
26.c1:在箱本体内加入有色水体,将第一自动取料机构的第一气动吸盘部分置于有色水体中,通过ccd图像扫描机构获得由有色水体底部至顶部的局部图像;获得图像的高度为h,宽度为w,将获得的图像转换为初始灰度图像;此时,初始灰度图像中,有色水体区域的灰度值为g0,无有色水体区域的灰度值为gn;
27.c2:第一自动取料机构吸取待测板材后,将其浸入箱本体中;液面静置后,通过ccd图像扫描机构获得由有色水体底部至顶部的局部图像;获得图像的高度为h,宽度为w,将获得的图像转换为实际灰度图像;
28.c3:将初始灰度图像与实际灰度图像叠合进行与运算;计算叠合后初始灰度图像中各像素点的灰度值g1与实际灰度图像中各像素点的灰度值g2的差值绝对值;若||g1-g2|-|g0-gn||小于等于10,则对该像素点进行标记;否则舍弃该像素点;
29.c4:得到步骤c3处理后的灰度图像;得到标记后像素点的高度,即为第一自动取料机构吸取待测板材浸入箱本体后,有色水体液位改变量l,通过v=sl得出待测板材的体积v。
30.与现有技术相比,本发明的有益效果在于:
31.本发明将流水线上的待测建筑板材抽样自动拿取后,自动化完成对板材的各项性能检测,包括板材的防水性能检测,且通过微波信号变化曲线判断板材内部的吸水量,从而从侧面判断板材的吸水性能,同时,采用图像识别技术识别板材体积的测量,相比于超声波测量时,存在的延时性缺陷,本方法测得的数据更精确;且采用液位变化测得抽样的体积的同时可以将板材直接浸在水体中,待吸水后直接进行防水性能检测,无需额外增加设备。
附图说明
32.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
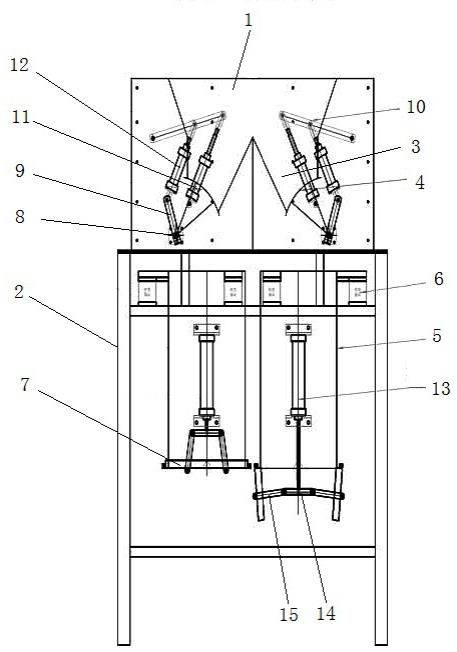
33.图1为本发明一种建筑材料自动化质量检测方法的检测设备结构示意图;
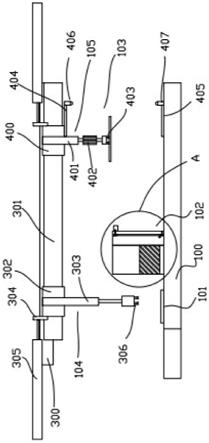
34.图2为图1的a的放大结构示意图。
具体实施方式
35.下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
36.实施例1
37.如图1-2所示,本实施例涉及的设备包括设置于流水线侧边的检测平台100,所述检测平台上依次设置有自动称重组件101、自动体积测量组件102以及微波信号检测机构103;还包括第一自动取料机构104以及第二自动取料机构105,所述第一自动取料机构将待检测建材由自动称重组件输送至自动体积测量组件,第二自动取料机构将完成体积测量的待测板材输送至微波信号检测机构,所述自动称重组件包括承重平台,所述承重平台上设置有重量传感器;通过所述重量传感器测得待称重板材进行称重,自动体积测量组件包括箱本体200;所述箱本体侧部设置有一透明窗口201;所述透明窗口由箱本体的顶边延伸至箱本体的底边上;透明窗口的外部设置有安装壳体202,安装壳体内设置有ccd图像扫描机构,所述ccd图像扫描机构包括第一驱动电机203、主传动齿轮204、从动传动齿轮205、齿条206以及ccd扫描头组件207;所述第一驱动电机的壳体固定在安装壳体的右侧壁外侧,其输出轴穿过所述安装壳体的右侧壁端部固定有所述主传动齿轮;所述从动传动齿轮设置于所述主传动齿轮的正下方,所述齿条传动连接所述主传动齿轮以及从动传动齿轮,ccd扫描头组件固定在齿条的其中一侧上;ccd扫描头组件在透明窗口顶边以及底边之间上下运动,扫描获得透明窗口内液体的图像,第一自动取料机构包括设置于检测平台上方的安装梁300,所述安装梁上固定有一滑轨301;所述滑轨上设置有第一滑块302所述第一滑块上固定有第一气缸303,所述第一气缸的活塞杆上设置有第一气动吸盘306;所述第一滑块通过第一连接块304连接有第二气缸305,第二气缸的缸体固定在安装梁上;第二自动取料机构包括滑动连接在滑轨上的第二滑块400,所述第二滑块上固定有第三气缸401,所述第三气缸的活塞杆上连接有第二驱动电机402,所述第二驱动电机的输出轴上连接有第二气动吸盘403;所述微波信号检测机构包括设置与第二滑块底部的第一安装板404,以及设置在检测平台上的第二安装板405;所述第一安装板的底面上设置有若干间隔排列的微波发射器;所述第二安装板的顶面上设置有与微波发射器一一对应的若干间隔排列的微波接收器;还包括位置传感器发射器406以及位置传感器接收器407,所述位置传感器发射器设置在第一安装板的末端,所述位置传感器接收器设置在第二安装板的末端,当位置传感器接收器接收到所述位置传感器发射器发射的信号时,则所述微波发射器及微波发射器实现一一对应。
38.一种建筑材料自动化质量检测方法,包括以下步骤:
39.步骤一:取经检测质量合格的建筑板材,获得对比数据,包括建筑板材的标准密度值以及板材的防水性能标准评价曲线;其中,分别通过自动密度值测量机构及微波信号检测机构获得所述标准密度值和所述防水性能标准评价曲线;
40.其中,通过自动密度值测量机构获得建筑板材的标准密度值的方法,包括如下子步骤:
41.a1:取三组经检测质量合格的建筑板材,并对每组建筑板材进行命名为a1、a2、a3,自动密度值测量机构包括自动称重组件以及自动体积测量组件,通过所述自动称重组件分别对三组建筑板材进行称重,称重后获得三组建筑板材的质量分别为m1、m2、m3;
42.a2:通过自动体积测量组件测量三组建筑板材的体积分别为v1、v2、v3;
43.以测量v1为例,测量建筑板材的体积具体方法包括如下子步骤:
44.c1:在箱本体内加入有色水体,为了与透明色有较大的反差,本实施例在水体中加入红色颜料,形成红色水体;将第一自动取料机构的第一气动吸盘部分置于有色水体中,通过ccd图像扫描机构获得由有色水体底部至顶部的局部图像;获得图像的宽度高度为8cm*30cm,将获得的图像转换为初始灰度图像;此时,初始灰度图像中,有色水体区域的灰度值为g0=165,无有色水体区域的灰度值为gn=232;
45.c2:第一自动取料机构吸取待测板材后,将其浸入箱本体中;液面静置后,通过ccd图像扫描机构获得由有色水体底部至顶部的局部图像;获得图像的高度为30cm,宽度为8cm,将获得的图像转换为实际灰度图像;
46.c3:将初始灰度图像与实际灰度图像叠合进行“与”运算;计算叠合后初始灰度图像中各像素点的灰度值g1与实际灰度图像中各像素点的灰度值g2的差值绝对值;若||g1-g2|-|g0-gn||小于等于10,则对该像素点进行标记;否则舍弃该像素点;
47.c4:得到步骤c3处理后的灰度图像;得到标记后像素点的高度,计算方法为:获得的实际灰度图像以及标准灰度图像的大小相同,本实施例获得的两图像大小为8cm*30cm;即302像素*1134像素;对应的可以的到单个像素的液位l为0.26mm;标记后像素点的个数n=47;则有色水体液位改变量l=1.23cm。即为第一自动取料机构吸取待测板材浸入箱本体后,有色水体液位改变量l=1.23cm,通过v=sl得出待测板材的体积v;其中,s为箱本体的截面积。如此依次得到v1、v2、v3;计算得到三组建筑板材a1、a2、a3的平均密度分别为ρ1、ρ2、ρ3,取ρ1、ρ2、ρ3的平均值得到标准密度值ρ01=1.12g/cm3;取标准密度值的阈值为正负0.05g/cm3,其中,通过自动体积测量组件测量待测板材的体积的方法,
48.步骤二:通过第一自动取料机构取生产线上待检测的三组建筑板材作为抽样;分别通过自动密度值测量机构获得各抽样的实际密度值ρ100=1.08g/cm3,ρ200=1.13g/cm3,ρ300=1.10g/cm3;具体的实际密度值获得的方法与步骤一中的相同;
49.步骤三:将各抽样测得的实际密度值与标准密度值进行对比,各抽样的实际密度值均在标准密度值的阈值内;则进入步骤四;
50.步骤四:通过微波信号检测机构获得各抽样的防水性能实际评价曲线;将防水性能实际评价曲线与防水性能标准评价曲线进行对比;若防水性能实际评价曲线在防水性能标准评价曲线的阈值内;则判定该抽样检测合格;否则判定抽样检测不合格;
51.步骤五:经步骤四检测的抽样都合格时,判定该批抽样检测合格;若其中有一抽样的检测不合格,则判定为不合格,发出警报,工作人员检测板材的各道工序或重新抽样检测;其中,获得防水性能标准评价曲线、防水性能实际评价曲线以及判断建筑板材抽样的防水性能是否合格的方法,包括如下子步骤:
52.b1:将检测质量合格的建筑板材浸入水中,浸泡时间30min后,取出,以板材的中心点为基准点;呈环形排列设置向外延伸的5个标准测量面;分别为1号标准测量面、2号标准测量面、3号标准测量面、4号标准测量面、5号标准测量面,在各标准测量面上取10个点测得微波信号变化参数,形成对应于每个标准测量面的5个标准微波信号变化曲线作为防水性能标准评价曲线;
53.b2:将待检测建筑板材的抽样浸入水中,浸泡时间30min后,取出,以待检测抽样的
中心点为基准点;呈环形排列设置向外延伸的5个实际测量面;分别为1号实际测量面、2号实际测量面、3号实际测量面、4号实际测量面、5号实际测量面;在实际测量面上取10个点测得微波信号变化参数,形成对应于每个测量面的5个实际微波信号变化曲线作为防水性能实际评价曲线;
54.b3:取抽样上1号实际测量面的实际微波信号变化曲线;将其与1号标准测量面的标准微波信号变化曲线做对比;若实际微波信号变化曲线在标准微波信号变化曲线的阈值内,则判定该抽样在该实际测量面范围内的防水性能符合标准;由内向外,依次其他各个实际测量面的实际微波信号变化曲线;与对应标准测量面的标准微波信号变化曲线做对比;得出每个实际测量面的防水性能均符合标准;判定该抽样的防水性能符合标准,如此完成检测。
55.实施例2
56.本实施例涉及的检测设备与实施例1中的相同;具体的,包括设置于流水线侧边的检测平台100,所述检测平台上依次设置有自动称重组件101、自动体积测量组件102以及微波信号检测机构103;还包括第一自动取料机构104以及第二自动取料机构105,所述第一自动取料机构将待检测建材由自动称重组件输送至自动体积测量组件,第二自动取料机构将完成体积测量的待测板材输送至微波信号检测机构,所述自动称重组件包括承重平台,所述承重平台上设置有重量传感器;通过所述重量传感器测得待称重板材进行称重,自动体积测量组件包括箱本体200;所述箱本体侧部设置有一透明窗口201;所述透明窗口由箱本体的顶边延伸至箱本体的底边上;透明窗口的外部设置有安装壳体202,安装壳体内设置有ccd图像扫描机构,所述ccd图像扫描机构包括第一驱动电机203、主传动齿轮204、从动传动齿轮205、齿条206以及ccd扫描头组件207;所述第一驱动电机的壳体固定在安装壳体的右侧壁外侧,其输出轴穿过所述安装壳体的右侧壁端部固定有所述主传动齿轮;所述从动传动齿轮设置于所述主传动齿轮的正下方,所述齿条传动连接所述主传动齿轮以及从动传动齿轮,ccd扫描头组件固定在齿条的其中一侧上;ccd扫描头组件在透明窗口顶边以及底边之间上下运动,扫描获得透明窗口内液体的图像,第一自动取料机构包括设置于检测平台上方的安装梁300,所述安装梁上固定有一滑轨301;所述滑轨上设置有第一滑块302所述第一滑块上固定有第一气缸303,所述第一气缸的活塞杆上设置有第一气动吸盘304;所述第一滑块通过第一连接块304连接有第二气缸305,第二气缸的缸体固定在安装梁上;第二自动取料机构包括滑动连接在滑轨上的第二滑块400,所述第二滑块上固定有第三气缸401,所述第三气缸的活塞杆上连接有第二驱动电机402,所述第二驱动电机的输出轴上连接有第二气动吸盘403;所述微波信号检测机构包括设置与第二滑块底部的第一安装板404,以及设置在检测平台上的第二安装板405;所述第一安装板的底面上设置有若干间隔排列的微波发射器;所述第二安装板的顶面上设置有与微波发射器一一对应的若干间隔排列的微波接收器;还包括位置传感器发射器406以及位置传感器接收器407,所述位置传感器发射器设置在第一安装板的末端,所述位置传感器接收器设置在第二安装板的末端,当位置传感器接收器接收到所述位置传感器发射器发射的信号时,则所述微波发射器及微波发射器实现一一对应。
57.一种建筑材料自动化质量检测方法,包括以下步骤:
58.步骤一:取经检测质量合格的建筑板材,获得对比数据,包括建筑板材的标准密度
值以及板材的防水性能标准评价曲线;其中,分别通过自动密度值测量机构及微波信号检测机构获得所述标准密度值和所述防水性能标准评价曲线;
59.其中,通过自动密度值测量机构获得建筑板材的标准密度值的方法,包括如下子步骤:
60.a1:取四组经检测质量合格的建筑板材,并对每组建筑板材进行命名为b1、b2、b3、b4,自动密度值测量机构包括自动称重组件以及自动体积测量组件,通过所述自动称重组件分别对四组建筑板材进行称重,称重后获得四组建筑板材的质量分别为n1、n2、n3、n4;
61.a2:通过自动体积测量组件测量四组建筑板材的体积分别为s1、s2、s3、s4,计算得到四组建筑板材b1、b2、b3、b4的平均密度分别为ρ300、ρ400、ρ500、ρ600,取ρ300、ρ400、ρ500、ρ600的平均值得到标准密度值ρ02=1.02g/cm3;取标准密度值的阈值为正负0.05g/cm3。
62.以测量s1为例,测量建筑板材的体积具体方法包括如下子步骤:
63.c1:在箱本体内加入有色水体,将第一自动取料机构的第一气动吸盘部分置于有色水体中,通过ccd图像扫描机构获得由有色水体底部至顶部的局部图像;获得图像的宽度高度为8cm*30cm,将获得的图像转换为初始灰度图像;此时,初始灰度图像中,有色水体区域的灰度值为g0=173,无有色水体区域的灰度值为gn=226;
64.c2:第一自动取料机构吸取待测板材后,将其浸入箱本体中;液面静置后,通过ccd图像扫描机构获得由有色水体底部至顶部的局部图像;获得图像的高度为30cm,宽度为8cm,将获得的图像转换为实际灰度图像;
65.c3:将初始灰度图像与实际灰度图像叠合进行与运算;计算叠合后初始灰度图像中各像素点的灰度值g1与实际灰度图像中各像素点的灰度值g2的差值绝对值;若||g1-g2|-|g0-gn||小于等于10,则对该像素点进行标记;否则舍弃该像素点;
66.c4:得到步骤c3处理后的灰度图像;得到标记后像素点的高度,计算方法为:获得的实际灰度图像以及标准灰度图像的大小相同,本实施例获得的两图像大小为8cm*30cm;即302像素*1134像素;对应的可以的到单个像素的液位l为0.26mm;标记后像素点的个数n=68;则有色水体液位改变量l=1.78cm。即为第一自动取料机构吸取待测板材浸入箱本体后,有色水体液位改变量l=1.78cm,通过v=sl得出待测板材的体积v;其中,s为箱本体的截面积。
67.如此依次得到s1、s2、s3、s4,计算得到四组建筑板材b1、b2、b3、b4的平均密度分别为ρ300、ρ400、ρ500、ρ600,取ρ300、ρ400、ρ500、ρ600的平均值得到标准密度值ρ02=1.02g/cm3;取标准密度值的阈值为正负0.05g/cm3。
68.步骤二:通过第一自动取料机构取生产线上待检测的三组建筑板材作为抽样;分别通过自动密度值测量机构获得各抽样的实际密度值ρ301=0.91g/cm3,ρ401=0.94g/cm3,ρ501=1.03g/cm3,ρ601=1.04g/cm3;具体的实际密度值获得的方法与步骤一中的相同;
69.步骤三:将各抽样测得的实际密度值与标准密度值进行对比,有2抽样的实际密度值不在标准密度值的阈值内;由于板材密度不再设定范围内,因此,若板材的密度太小,则表示内部结构不紧密,吸水性能会相对增加,因此无需进行防水性能检测,若密度大于设定范围,则判定内部结构过于紧密,导致单位体积内材料增加,成本相应增加,因此直接判定该批抽样的检测不合格,发出警报,工作人员进行重新抽样检测。
70.如此,当设定好第一自动取料机构在流水线行拿取抽样的时间间隔,即可自动化完成流水线上板材的自动化检测,当出现异常时,发出警报,工作人员只需根据警报提示进行处理。
71.以上结合附图对本发明的实施方式作了详细说明,但本发明不限于所描述的实施方式。对于本领域的技术人员而言,在不脱离本发明原理和精神的情况下,对这些实施方式进行多种变化、修改、替换和变型,仍落入本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。