1.本技术属于飞机运动机构试验技术领域,具体涉及一种针对飞行器可动翼面的随动加载装置。
背景技术:
2.由于智能结构、蒙皮的应用,使得飞机翼面弯度变化更大、气动效率更高,其在运动轨迹过程中的实时模拟气动载荷的加载成为重点研究方向,传统的采用胶布带或拉压垫结构形式的固定式加载方式,往往限制了蒙皮的自由度和伸展效率,试验过程中对结构增加了附加约束,其加载方式不能充分验证智能结构的变化规律,很难准确模拟可动翼面其系统作为一个整体在飞机飞行过程中的真实受载历程和结构与运动机构之间在受载过程中的相互影响。
技术实现要素:
3.为了解决现有技术中存在的至少一个技术问题,本技术提供了一种针对飞行器可动翼面的随动加载装置。
4.本技术公开了一种针对飞行器可动翼面的随动加载装置,包括:
5.试验件固定装置,所述试验件固定装置设置在试验区内,用于固定可动翼面;
6.加载作动筒,其包括筒体以及设置在筒体上的加载杆,并通过其筒体竖直固定在所述试验区的地坪上,且位于所述可动翼面底部;
7.随动加载头,所述随动加载头的底端与所述加载作动筒的加载杆端部通过铰接接头铰接,且所述随动加载头能够绕与所述铰接接头在预定角度范围内转动,另外,在所述随动加载头的顶端沿着所述可动翼面的航向方向镶嵌有至少三个加载滚轮,所述随动加载头转动的预定角度范围以及所述至少三个加载滚轮的布置方式配置成,无论所述随动加载头转动至任一角度,至少有一个所述加载滚轮的外轮面与顶部的所述可动翼面进行线接触;
8.驱动装置,所述驱动装置与所述可动翼面连接,用于驱动所述可动翼面进行偏转;
9.角度传感器,所述角度传感器设置在所述可动翼面上,用于实时检测所述可动翼面的偏转角度;
10.操纵系统,所述操纵系统与驱动装置、所述角度传感器以及加载作动筒连接,用于通过所述驱动装置来控制所述可动翼面的偏转以及偏转角度,还用于根据所述角度传感器的反馈信号,生成并发送用于控制所述加载作动筒施加对应载荷的加载指令。
11.根据本技术的至少一个实施方式,所述至少三个加载滚轮中,在第一个和最后一个加载滚轮之间的所有加载滚轮的轴心位置,均高于第一个加载滚轮与最后一个加载滚轮的轴心的连线。
12.根据本技术的至少一个实施方式,所述加载滚轮的数量为三个,位于第一个和第三个加载滚轮之间的第二个加载滚轮的轴心位置,高于第一个加载滚轮与第三个加载滚轮的轴心的连线。
13.根据本技术的至少一个实施方式,所述加载滚轮由弹性材料制成。
14.本技术至少存在以下有益技术效果:
15.1)本技术的针对飞行器可动翼面的随动加载装置,通过调节自适应随动加载头,实现可动翼面运动机构的随动加载,可以准确反映襟缝翼结构系统在所有飞行姿态下的受载问题;
16.2)本技术的针对飞行器可动翼面的随动加载装置,仅仅实现翼面法向载荷的施加,保证了翼面蒙皮沿展向和航向的伸展,不约束其他方向的自由度,可根据结构的变化自适应的实现载荷施加,无任何附加约束;
17.3)本技术的针对飞行器可动翼面的随动加载装置中,随动加载头可自适应的根据可动翼面的弯度变化而发生轨迹变化,并保持运动轨迹一致;
18.5)本技术的针对飞行器可动翼面的随动加载装置中,可以通过调节加载作动筒载荷的大小,可实现翼面展向方向弯度变化后的载荷随动加载;
19.6)通过本技术的针对飞行器可动翼面的随动加载装置进行试验,证明随动加载方法科学可行、满足工程试验要求。
附图说明
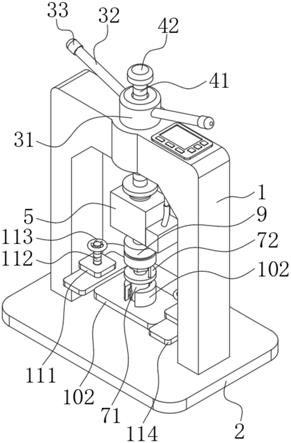
20.图1是本技术的针对飞行器可动翼面的随动加载装置的结构示意图;
21.图2是本技术的针对飞行器可动翼面的随动加载装置在加载过程中襟翼(即可动翼面)载荷-位移谱变化规律示意图;
22.图3是本技术的针对飞行器可动翼面的随动加载装置中随动加载头的结构示意图;
23.其中:
24.1-可动翼面、2-随动加载头、3-加载滚轮、4-铰接接头、5-加载作动筒、6-地坪、7-试验件固定装置。
具体实施方式
25.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本技术一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
26.需要理解的是,在本技术的描述中可能涉及到的技术术语,例如“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制。
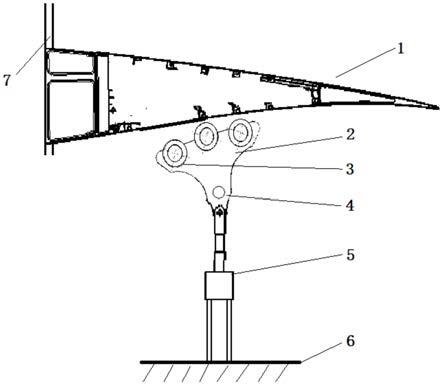
27.如图1-图3所示,本技术公开了一种针对飞行器可动翼面的随动加载装置,可以包括试验件固定装置7、加载作动筒5、随动加载头2、驱动装置、角度传感器以及操纵系统。
28.具体的,试验件固定装置7设置在试验区内,用于固定可动翼面1,且可动翼面1在试验件固定装置7上能够实现弯度变化(即可偏转),其弯度变化范围可参见图2所示,其中的过程反映了飞机在各个飞行阶段下襟翼所处的不同角度;具体的,图中的a-b-c-d为飞机起飞过程,δ1为起飞放襟翼角度,e-f-g-a着陆过程,δ2为着陆放襟翼角度。
29.加载作动筒5采用目前已知的作动筒结构,可以包括筒体以及设置在筒体上的加载杆;加载作动筒5通过其筒体竖直(此时筒体位于底部,加载杆位于顶部)固定在试验区的地坪上,且位于可动翼面1底部。
30.随动加载头2可以根据需要设置成多种适合的外形,本实施例中,如图3所示,采用底部窄顶部宽的近似倒三角形形状;其底端与加载作动筒5的加载杆端部通过铰接接头4铰接,且随动加载头2能够绕与铰接接头4在预定角度范围内转动;另外,在随动加载头2的顶端沿着可动翼面1的航向方向镶嵌有至少三个加载滚轮3;可以理解的是,随动加载头2转动的预定角度范围可以根据随动加载头2的形状、加载滚轮3的数量、设置位置等进行适合选择;本实施例中,随动加载头2转动的预定角度范围与至少三个加载滚轮3的布置方式,相互之间需要满足如下条件:无论随动加载头2转动至任一角度,至少有一个加载滚轮3的外轮面与顶部的可动翼面1进行线接触(以实现载荷的施加)。
31.还可以理解的是,为满足上述要求,加载滚轮3的数量及布置位置的可以有多种组合;本实施例中,优选加载滚轮3的数量为三个,且位于第一个和第三个加载滚轮3之间的第二个加载滚轮3的轴心位置,高于第一个加载滚轮3与第三个加载滚轮3的轴心的连线。
32.进一步,驱动装置(图中未示出)与可动翼面1连接,用于驱动可动翼面1进行偏转;其中,驱动装置可以采用多种已知的结构,例如可以是作动筒或者驱动电机带动的绳索等。
33.角度传感器设置在可动翼面1上对应位置处,用于实时检测可动翼面1的偏转角度。
34.操纵系统与驱动装置、角度传感器以及加载作动筒5连接,用于通过驱动装置来控制可动翼面1的偏转以及偏转角度;其中,偏转角度的控制可以由0
°
至最大角度,再回到0
°
状态;进一步,操纵系统还可以用于根据角度传感器的反馈信号,生成并发送用于控制加载作动筒5施加对应载荷的加载指令(即可根据可动翼面1偏转角度的不同,发送不同载荷加载命令,形成与襟翼运动轨迹一致的多自由度加载平台)。其中,操纵系统可以采用目前已知的例如plc控制器、微型计算机等。
35.进一步,本技术的针对飞行器可动翼面的随动加载装置中,优选加载滚轮3由弹性材料(例如橡胶或其他弹性材料)制成,从而使得加载滚轮3具备一定的弹塑性,以保证可动翼面1的安全性。
36.进一步,本技术的针对飞行器可动翼面的随动加载装置在试验过程中,通过调节加载作动筒5的输出载荷通过3个加载滚轮3进行加载,加载滚轮3与可动翼面1线接触,实现可动翼面1的法向载荷施加,而保证了可动翼面1蒙皮沿展向和航向的伸展,不约束其他方向的自由度;另外,本技术的针对飞行器可动翼面的随动加载装置中,加载滚轮3施加的载荷始终垂直于可动翼面,载荷作用点的运动轨迹基本上在一个平面内;并且,本技术的针对飞行器可动翼面的随动加载装置可根据结构的变化自适应的实现载荷施加,无任何附加约束。
37.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何
熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。