1.本技术涉及公路及铁路施工装备技术领域,具体地,涉及一种接触网放线车。
背景技术:
2.随着高速电气化铁路的发展,接触网施工技术、装备和工艺水平的不断提高,对作业设备也提出了更高的要求。传统的接触网放线车是专用轨道车。
3.高速铁路站后四电工程在施工中,常常出现站后工程零工期或负工期,赶工期设备不足,工程工期又不允许滞后,而且现场施工时铁路轨道敷设不及时,传统的专用轨道车也不能及时到场,另外专用轨道车管理复杂。
4.因此,传统的专用轨道车形式的接触网放线车无法适应目前接触网施工工期的要求,是本领域技术人员急需要解决的技术问题。
5.在背景技术中公开的上述信息仅用于加强对本技术的背景的理解,因此其可能包含没有形成为本领域普通技术人员所知晓的现有技术的信息。
技术实现要素:
6.本技术实施例提供了一种接触网放线车,以解决传统的专用轨道车形式的接触网放线车无法适应目前接触网施工工期的要求的技术问题。
7.本技术实施例的一种接触网放线车,包括:
8.车架;
9.公铁两用轮胎,安装在车架之下;
10.侧导向装置,所述侧导向装置安装在所述车架的侧面,所述侧导向装置能够在横向方向向远离车架方向伸出和收回,且所述侧导向装置能够在垂向方向向下伸出和收回;
11.其中,所述侧导向装置用于贴在轨道的轨道板的侧面对放线车进行导向,所述横向方向是轨道的两个轨条的宽度方向。
12.本技术实施例由于采用以上技术方案,具有以下技术效果:
13.当需要在公路上行驶时,侧导向装置保持收回;当需要在轨道上行驶时,公铁两用轮胎置于轨道的轨道之上,侧导向装置在横向方向向远离车架方向伸出,再在垂向方向向下伸出,紧贴在轨道的轨道板的侧面,对放线车进行导向,以防止接触网放线车行走时发生侧移倾翻,即侧导向装置通过轨道的轨道板的侧面进行导向,尤其能够适用于在轨道的轨道板已经铺设完成,且轨道的轨条尚未进行铺设的情况。这样,接触网放线车在轨道的轨条尚未进行铺设的情况下,也能进行接触线的架设,更能适应接触网施工工期的要求。
附图说明
14.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
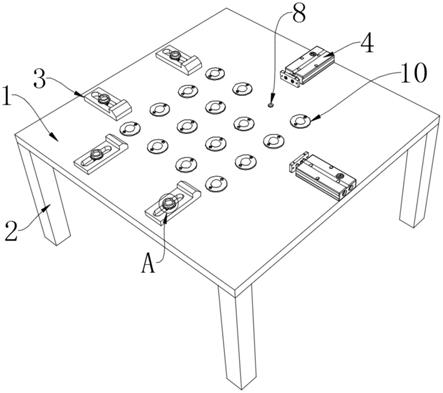
15.图1为本技术实施例的接触网放线车的示意图;
16.图2为图1的接触网放线车的垂向导向装置的垂向导向轮压在轨道的轨条之上的示意图;
17.图3为本技术实施例的接触网放线车的恒张力放线装置的简化示意图;
18.图4为图3所示接触网放线车的液压控制组件和液压执行组件的连接示意图。
19.附图标记:
20.120车架,130公铁两用轮胎,140侧导向装置,141侧导向轮,150垂向导向装置,151垂向导向轮,
21.110放线盘,111放线盘夹钳,112导绳轮,113放线盘移动装置,
22.210张力盘,211张力盘夹钳,213张力盘移动装置,
23.310顶升柱,313顶升动力装置,
24.411发动机,412液压油泵,413电液比例阀,414油箱,415电磁阀,416 液压马达,
25.11接触线,12轨道板。
具体实施方式
26.为了使本技术实施例中的技术方案及优点更加清楚明白,以下结合附图对本技术的示例性实施例进行进一步详细的说明,显然,所描述的实施例仅是本技术的一部分实施例,而不是所有实施例的穷举。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
27.实施例一
28.如图1和图2所示,本技术实施例的接触网放线车,包括:
29.车架120;
30.公铁两用轮胎130,安装在车架120之下;
31.侧导向装置140,所述侧导向装置140安装在所述车架120的侧面,所述侧导向装置140能够在横向方向向远离车架方向伸出和收回,且所述侧导向装置140能够在垂向方向向下伸出和收回;
32.其中,所述侧导向装置140用于贴在轨道的轨道板12的侧面对接触网放线车进行导向,所述横向方向是轨道的两个轨条的宽度方向。
33.本技术实施例的接触网放线车,当需要在公路上行驶时,侧导向装置保持收回;当需要在轨道上行驶时,公铁两用轮胎置于轨道的轨道之上,侧导向装置在横向方向向远离车架方向伸出,再在垂向方向向下伸出,紧贴在轨道的轨道板的侧面,对放线车进行导向,以防止接触网放线车行走时发生侧移倾翻,即侧导向装置通过轨道的轨道板的侧面进行导向,尤其能够适用于在轨道的轨道板已经铺设完成,且轨道的轨条尚未进行铺设的情况。这样,接触网放线车在轨道的轨条尚未进行铺设的情况下,也能进行接触线的架设,更能适应接触网施工工期的要求。
34.本技术实施例的接触网放线车,结构紧凑,能够实现公路铁路行走的快速切换,能够快速实现转场。
35.实施中,如图1和图2所示,所述侧导向装置140的下端具有侧导向轮141;
36.其中,所述侧导向轮141用于贴在轨道的轨道板12的侧面滚动对接触网放线车进行纵向方向的导向;
37.其中,纵向方向是轨道的长度方向。
38.通过侧导向装置下端的侧导向轮紧贴在轨道的轨道板的侧面进行滚动对接触网放线车进行纵向方向的导向的方式,两者之间的摩擦力较小。
39.实施中,如图1和图2所示,所述侧导向装置140为两对,每对侧导向装置140对称安装在车架120的两侧;
40.其中一对侧导向装置设置在距离车架头部的四分之一位置,另一对侧导向装置设置在距离车架头部的四分之三位置。
41.每对侧导向装置对称设置在车架的两侧,这样,对称设置在车架两侧的侧导向装置,使得在进行侧导向时,能够对每个侧导向装置施加预设值的压力,使得侧导向不会发生偏移,轨道的轨道板的两侧面收到方向相反的两个作用力,轨道板受力达到平衡。
42.两对侧导向装置,均匀的设置在车架的两侧,使得整个车架受力均衡,侧导向不会发生偏移。
43.实施中,如图1和图2所示,接触网放线车还包括:
44.垂向导向装置150,安装在所述车架120的下方,所述垂向导向装置150 能够在垂向方向向下伸出和收回;
45.其中,所述垂向导向装置150的底端具有垂向导向轮151,所述垂向导向轮151用于压在轨道的轨条之上对接触网放线车进行纵向方向的导向。
46.通过垂向导向装置底端的垂向导向轮紧贴在轨道的轨条的之上进行滚动对接触网放线车进行纵向方向的导向的方式,两者之间的摩擦力较小。
47.具体的,所述垂向导向装置150为两对,对称安装在车架120每侧的前后两端。
48.本技术实施例的接触网放线车包括公铁两用底盘、接触网恒张力放线装置、动力系统,控制系统、制动系统、液压系统和电气系统。
49.所述公铁两用底盘,包括车架、设置在车架上的驾驶室、连接在车架底部连接有公铁两用轮胎的驱动桥和转向驱动桥、连接在车架上的侧导向装置、连接在车架前后的导向钢轮装置。
50.所述车架,为型钢焊接结构,以做为承载主体。
51.所述驾驶室,设置在车架前部上,为简易棚式结构,驾驶室内有集成操作面板和液晶显示器、车外设置有多个摄像头,显示各项整机参数和外部环境景象。
52.转向驱动桥和驱动桥,采用国产或进口专用公铁两用车桥,选取合适的轴重、减速比、制动力矩,保证所述驱动桥各项参数都有安全的冗余,所述驱动桥带转向和液压盘式制动,设有驻车制动功能,能实现紧急停车。
53.公铁两用轮胎为橡胶轮胎,可在持续当班作业和重负荷载重的情况下长时间使用,连接在所述驱动桥上。
54.所述侧导向装置,连接在所述车架上,以防止车辆侧移倾翻,包括横移机构、纵移机构、横移油缸、纵移油缸、安装座、导向滚轮等;所述导向钢轮装置,分别连接在所述车架前后,用以铁路走行,包括轮对、构架、变幅油缸和减震弹簧等,不带动力。
55.公铁两用轮胎由转向驱动桥和驱动桥驱动,即接触网放线车自带动力。侧导向轮和垂向垂向导向轮均为刚性的导向轮。
56.所述动力系统,设置在所述公铁两用底盘中部,包括发动机、燃油箱、加油泵及油
管等,系统还设有备用泵,在车辆出现故障或车辆检修时,给除走行外的装置提供动力。
57.所述控制系统,设置在所述公铁两用底盘驾驶室内,包括动力控制系统、走行控制系统、行车跟随控制系统、侧导向控制系统、导向钢轮控制系统、恒张力放线控制系统等。
58.所述制动系统,包括液压制动和手制动,行车制动采用所述驱动桥自带的液压盘式制动机,驻车制动采用所述驱动桥自带的湿式制动,另外设置紧急制动系统,在紧急情况下按下紧急制动按钮,可实现整车紧急制动,设置辅助制动系统,并在操纵台、车体栏杆的适当位置设置操作按钮。
59.所述液压系统,包括走行液压系统、转向制动液压系统、导向液压系统和上装液压系统,走行液压系统负责所述放线车走行,转向制动液压系统负责所述放线车制动和转向,导向液压系统负责所述侧导向横移升降、导向钢轮升降和散热系统,上装液压系统负责恒张力放线装置作业,通过油缸来实现接触网线盘架、承力索线盘架对中和恒张力装置张力调节,通过线盘架制动阀、张力轮制动阀控制制动盘油路的通断,实现接触网、承力索线盘和张力轮的制动与释放。液压系统设置有应急系统,在动力系统或主系统出现故障时,启动应急系统,保证放线车安全。系统所有液压控制组件都具有数字显示工作压力的压力传感器,对各回路中的压力能进行监控和显示,便于各仪表、手动换向阀等元件的安装,同时方便司机观察和操纵,并有相应的指示标牌。
60.所述电气系统,由电控箱、信号接线箱、报警器、电喇叭和操作台等组成,同时可依据需求配置遥控器。
61.实施例二
62.本技术实施例的,在实施例一的基础上,还具有以下特点。
63.如图3所示,本技术实施例的接触网放线车,包括固定在车架之上的恒张力放线装置,所述恒张力放线装置包括:
64.放线盘110,固定在所述车架之上;其中,所述放线盘110用于预缠绕接触线11;
65.放线盘处张力施加装置,安装于所述放线盘110处;其中,所述放线盘处张力施加装置用于为所述放线盘110的出线施加张力;
66.张力机,固定在所述车架之上且与所述放线盘110间隔设置;其中,所述张力机用于承载所述放线盘110的出线并施加张力后从所述张力机出线。
67.本技术实施例的接触网放线车,接触网恒张力放线装置有序布置在公铁两用底盘上,可实现电气化铁路接触网、承力索收放线,可实现恒张力放线作业,张力可根据实际需要调节。恒张力放线装置具有两个能够施加张力的部件,放线盘处张力施加装置和张力机,放线盘处张力施加装置用于对放线盘的出线施加张力,张力机对自身承载的经放线盘放出的接触线施加张力并出线。本技术实施例的接触网放线车,通过设置两个能够施加张力的部件,放线盘处张力施加装置和张力机,为接触网放线车放线的张力值稳定提供了条件。
68.实施中,如图3所示,所述张力机包括两个同步转动的张力盘210;其中,两个所述张力盘210用于承载所述放线盘110的出线;
69.所述放线盘处张力施加装置包括:
70.放线盘转动阻力施加装置,用于对所述放线盘110的转动施加转动阻力,使得所述放线盘110与所述张力盘210的转动方向相同,且所述放线盘110的转动速度小于所述张力盘210的转动速度。
71.传统的放线车,放线盘一般随着张力盘被动转动,随着放线盘上接触线的放出,放线盘重量减小,放线盘的转动阻力会越来越小,以致使放线盘与张力盘之间导线的张力值越来越小,也就意味着缠绕至张力盘上的接触线逐渐松散,使后续架设的接触线不能达到规定的张力值,严重降低了接触网结构的稳定性和弹性。
72.本技术实施例的接触线放线车,由于具有放线盘转动阻力施加装置,随着方向盘上接触线的放出,放线盘重量减小,放线盘的转动阻力变小,放线盘转动阻力施加装置能够施加转动阻力,使得放线盘与张力机之间接触线的张力值是能够调整的,为接触网放线车放线的张力值稳定提供了条件。
73.实施中,接触网放线车还包括:
74.控制单元,用于根据所述放线车的放线张力目标值,所述放线盘出线的实际张力值和所述张力机出线的实际张力值,控制放线盘转动阻力施加装置对所述放线盘的转动施加转动阻力。
75.放线盘转动阻力施加装置对放线盘的转动施加的转动阻力,受到控制单元的控制,从而使得放线盘的转动受到控制单元的控制。这样,放线盘与张力机之间接触的张力值能够调整,为接触网放线车放线的张力值稳定提供了条件。
76.实施中,如图3所示,所述放线盘处张力施加装置还包括:
77.放线盘夹钳111,一个所述放线盘夹钳111对应安装于一个放线盘;其中,所述放线盘夹钳111用于在所述放线盘110的出线位置夹紧接触线11施加制动力后出线;
78.所述张力机还包括:
79.张力盘夹钳211,一个所述张力盘夹钳211对应安装于一个张力盘210;其中,所述张力盘夹钳用于在所述张力盘的出线位置夹紧接触线施加制动力后,以预设圈数缠绕两个所述张力盘后出线。
80.在接触网放线车沿接触线架设方向匀速前进拉扯接触线,为接触线的架设提供张紧力。通过放线盘夹钳和张力盘夹钳提供的制动力,为架设的接触线提供张力。
81.放线盘夹钳能够为放线盘的出线提供制动力,即为放线盘的出线提供张力;张力盘夹钳能够为张力盘的出线提供制动力,即为张力盘的出线提供张力。
82.实施中,如图3所示,所述控制单元,还用于根据所述放线车的放线张力目标值,所述放线盘出线的实际张力值和所述张力机出线的实际张力值,控制放线盘夹钳111和张力盘夹钳211的施加的制动力,使得所述张力机出线的实际张力值与所述放线车出线的目标值的差值比例绝对值在预设范围内。放线张力目标值即为放线张力设定值。
83.这样,控制单元根据放线车的放线张力目标值,放线盘出线的实际张力值和张力机出线的实际张力值,控制放线盘夹钳和张力盘夹钳的施加的制动力以及放线盘转动阻力施加装置对所述放线盘的转动施加转动阻力。
84.具体的,控制单元根据放线车的放线张力目标值,放线盘出线的实际张力值和张力机出线的实际张力值;
85.优先控制放线盘夹钳和张力盘夹钳的施加的制动力;在放线盘夹钳和张力盘夹钳能够施加的制动力达到各自的调整范围的上限值时,无法再调整放线盘夹钳和张力盘夹钳后;再控制放线盘转动阻力施加装置对所述放线盘的转动施加转动阻力,使得所述张力机出线的实际张力值与所述放线车出线的目标值的差值比例绝对值在预设范围内,如小于等
于5%。
86.实施中,如图3和图4所示,接触网放线车还包括:
87.张力盘移动装置213,与两个所述张力盘210连接,其中,所述张力盘移动装置213用于移动两个所述张力盘210远离和靠近所述放线盘110。
88.即在张力盘夹钳,放线盘夹钳,放线盘转动阻力施加装置都施加了各自最大的张力,接触线在张力机的出线位置的张力值仍让达不到放线车的放线张力目标值时,通过张力盘移动装置能够实现调整两个张力盘作为一个整体相对于张力盘的位置能够调整,实现出线张力的补偿,保证了在极端条件下依然能满足接触线的恒张力控制。放线车的放线张力目标值与接触网的接触线规定的张力一致,这样,如果接触网放线车的方向张力实际值能够达到放线张力目标值时,接触网放线车架设的接触线达到了接触线规定的张力。
89.实施中,如图3和图4所示,接触网放线车还包括:
90.放线盘移动装置113,与所述放线盘110连接,其中,所述放线盘移动装置113用于移动所述放线盘110沿所述放线盘的轴向方向移动;
91.导向杆,所述导向杆固定在所述放线盘和所述张力机之间,且所述导向杆的长度方向和所述放线盘的轴向方向一致;
92.导绳轮112,套接在所述导向杆的外周面,且所述导绳轮112能够沿所述导向杆的长度方向移动;
93.其中,所述放线盘110的出线经所述导绳轮112的下轮面进入所述张力机,以控制接触线在所述张力机的进线高度;所述放线盘110能够沿所述放线盘的轴向方向移动使得所述放线盘的出线位置接近所述张力机的进线位置,放线盘的车险位置调整的目标是所述放线盘的出线和所述张力机的进线位于同一直线或者接近同一直线。
94.随着放线盘的放线,放线盘的出线的高度会变高,放线盘的出线经导绳轮的下轮面进入到张力机,使得即使放线盘的出线高度变高,接触线在张力机的进线高度仍然保持不变。放线盘移动装置能带动放线盘沿所述放线盘的轴向方向移动,这样,配合导绳轮和导向杆,使得放线盘的出线位置能够配合张力机的进线位置进行调整,使得放线盘的出线位置和所述张力机的进线位置位于同一直线,能够减少放线过程中对接触线的摩擦和拉拽,提高了接触网的质量。
95.实施中,所述控制单元还用于:
96.根据所述导绳轮沿所述导向杆偏离基准位置的位移,控制所述放线盘沿所述放线盘的轴向方向进行同向位移,使得所述放线盘的出线位置接近所述张力机的进线位置。放线盘的车险位置调整的目标是所述放线盘的出线和所述张力机的进线位于同一直线或者接近同一直线。
97.放线盘移动装置能带动放线盘沿所述放线盘的轴向方向移动,这样,配合导绳轮和导向杆,使得放线盘的出线位置能够配合张力机的进线位置进行调整,使得放线盘的出线位置和所述张力机的进线位置位于同一直线或接近同一直线,即实现了接触线的对中。
98.实施中,接触网放线车还包括:
99.放线盘出线张力传感器,与所述控制单元通信连接,设置在所述放线盘的出线位置,用于获取所述放线盘出线的实际张力值,并传递至所述控制单元;
100.张力机出线张力传感器,与所述控制单元通信连接,设置在所述张力机的出线位
置,用于获取所述张力机出线的实际张力值,并传递至所述控制单元;
101.导绳轮距离传感器,与所述控制单元通信连接,设置在所述导绳轮上,用于获取所述导绳轮偏离所述导绳轮在所述导向杆的预设位置的距离,并传递至所述控制单元。
102.放线盘出线张力传感器,张力机出线张力传感器和导绳轮距离传感器,作为获得放线盘出线的实际张力值,所述张力机出线的实际张力值,导绳轮偏离所述导绳轮在所述导向杆的预设位置的距离,为控制单元的控制提供了基础。
103.实施中,如图3所示,接触网放线车还包括:
104.顶升柱310,所述顶升柱310固定在所述车架之上,且所述放线盘110位于所述顶升柱310和所述张力机之间;
105.顶升动力装置313,所述顶升动力装置313用于为顶升柱310提供升降的动力;
106.其中,所述顶升柱310用于顶起所述张力机出线的接触线,所述顶升柱能够升降以适应接触网的高度。
107.顶升柱的存在使得接触网放线车的放线高度是能够调整的,使得接触网放线车通用性更好。
108.本技术实施例的关键点包括:
109.控制单元通过控制放线盘夹钳和张力盘夹钳的施加的制动力,放线盘转动阻力施加装置的转动阻力,实现了接触网放线车出线张力值的自动调整,调整的目标是将张力机出线的实际张力值尽量接近放线车出线的目标值,或者至少在张力机出线的实际张力值与所述放线车出线的目标值的差值比例绝对值在预设范围内,如小于等于5%。这样,接触网放线车的出线为恒张力的接触网放线车。
110.控制单元通过导绳轮,导向杆,导绳轮距离传感器的结合,使得放线盘的出线和张力机的进线大致在一条直线上,实现了自动对中。
111.在放线盘夹钳,张力盘夹钳和放线盘转动阻力施加装置的调节范围,接触网放线车的出线的实际张力值仍然达不到放线车出线的目标值时,通过张力盘移动装置移动作为一个整体的两个张力盘的位置,进行张力补偿。
112.实施中,如图4所示,所述接触网放线车还包括:
113.两个张力盘驱动装置,一个所述张力盘驱动装置对应一个所述张力盘,所述张力盘驱动装置用于为所述张力盘的转动提供动力;
114.所述放线盘移动装置113,张力盘移动装置213,顶升动力装置313分别采用液压油缸;
115.所述放线盘夹钳和所述张力盘夹钳采用液压夹钳。
116.实施中,接触网放线车还包括液压控制组件:
117.用于控制液压执行组件中的液压油的流量和压力,以对液压执行组件所能转化的液压进行调整;
118.其中,所述液压执行组件包括液压油缸和液压夹钳。
119.具体的,如图4所示,液压控制组件包括发动机411、液压油泵412及电液比例阀413组成。如图4所示,发动机411通过分动箱与液压油泵412相连,为液压油泵412提供动力,使液压油泵412可以将机械能转化为液压能;液压油泵412是整个液压系统的动力源,能够满足液压系统对压力和流量的需求。其中,液压油泵412的进油口与油箱414相连通,出油口分
别与各个液压执行组件相连通,为液压执行组件提供相应的液压能。电液比例阀413设置在液压油泵412与液压执行组件之间的油路中,用于控制油路中液压油的流量和压力。如图4所示,电液比例阀的控制端与plc控制系统电连接。
120.控制单元采用plc控制系统。通过传感器采集信号分析计算,对液压系统各油路的流量和压力进行实时检测和控制,以调节对接触线施加的张力。工作时,信号传感器将信号传送给plc控制系统,plc控制系统进行内部运算后,将控制信号传输给相应的电液比例阀413及电磁阀415,从而通过电液比例阀及电磁阀对油路中液压油的流量和压力进行控制。
121.具体的,plc控制系统是在传统的顺序控制器的基础上引入了微电子技术、计算机技术、自动控制技术和通讯技术而形成的一代新型工业控制装置,目的是用来取代继电器、执行逻辑、记时、计数等顺序控制功能,建立柔性的远程控制系统。
122.信号传感器包括放线盘出线张力传感器,张力机出线张力传感器,导绳轮距离传感器。
123.脉冲宽度调制(pulse width modulation,pwm)技术。
124.实施例三
125.本技术实施例的接触网放线车的控制方法,对实施例二所述的接线王放线车进行自动控制,接触网放线车为接触线施加恒定张力。其具体步骤如下:
126.步骤s1:启动发动机411,发动机411通过分动箱为液压油泵412提供动力;
127.步骤s2:液压油泵412与油箱414连通,为液压控制组件和液压执行组件提供液压油;
128.步骤s3:接触线架设前,将放线盘110上的接触线11通过导绳轮112缠绕至张力盘210上,将所需张力输入至plc控制系统中并设定放线速度;
129.步骤s4:接触线11架设时,放线车按照设定的放线速度匀速前进,拉紧张力盘210及放线盘110上的接触线,放线盘夹钳111和所述张力盘夹钳211 夹紧,为接触线的架设提供制动力。车辆沿接触线架设方向匀速前进拉扯接触线,为接触线的架设提供张紧力。车辆沿接触线架设方向匀速的目标值即为放线车车速设定值。
130.通过放线盘出线张力传感器和张力机出线张力传感器对接触线的张力进行检测,然后将信号反馈给plc控制系统,plc控制系统内部进行pid运算,利用运算结果改变控制放线盘夹钳111和张力盘夹钳211的pwm值,从而改变放线盘夹钳111和张力盘夹钳211的制动力,令架设的接触线达到规定张力;
131.导绳轮112随放线盘释放的接触线11被动移动,导绳轮112距离传感器将导绳轮位置实信号传递给plc控制系统,plc控制系统经过计算,依据计算结果调节作为放线盘移动装置的液压油缸的电磁阀,进而对放线盘110位置沿方向盘的轴向方向进行调整,使得放线盘110的出线位置与张力盘的进线位置处于同一条线上;
132.若在张力自动调节过程中,plc控制系统判断出液压夹钳的调整范围和张力盘移动装置带动的张力盘的调整范围无法满足接触线张力需求时,则plc 控制系统控制作为张力盘驱动装置的张力补偿油缸接入,调整两个张力盘210 作为一个整体远离放线盘110,令接触线达到规定张力。
133.步骤s5:接触线架设完成后,放线盘夹钳111和所述张力盘夹钳211松开,放线盘113收线液压马达416启动,收卷回剩余接触线和接触网放线车的承力索。
134.本技术实施例的接触网放线车可实现电气化铁路接触网、承力索收放线,可实现恒张力放线作业,张力可根据实际需要调节,保证放线质量。
135.在本技术及其实施例的描述中,需要理解的是,术语“顶”、“底”、“高度”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
136.在本技术及其实施例中,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接,还可以是通信;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
137.在本技术及其实施例中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度小于第二特征。
138.上文的公开提供了许多不同的实施方式或例子用来实现本技术的不同结构。为了简化本技术的公开,上文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本技术提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
139.尽管已描述了本技术的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。
140.显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。