1.本发明涉及送餐机器人技术领域,具体为机器人动态场景下路径自动规划装置送餐机器人。
背景技术:
2.送餐机器人有运动功能,他能在指定的区域中行走,到达用户指定的位置,并根据周围的信息躲避障碍,同时也可以通过遥控器控制其行走;机器人可以在工作人员的操作下进行餐厅地图创建与编辑,设置一系列的餐桌目标点;在每次进入工作模式时,机器人就可以知道当前的位置,并可以自主导航运动到目标位置上;机器人具有语音输出功能,可以介绍菜品,提示顾客取餐;可以使用智能手机/平板电脑对机器人直接进行运动、语音控制,也可以通过下达一系列预置指令,让机器人自动完成某项复杂任务;机器人具有电量检测功能,当电量低于设定值时,可以自己走到充电站的位置进行充电。
3.现有的送餐机器人其多是将送餐的位置和餐盘上的食物暴露在外,这样容易造成来往的顾客不小心的情况将毛发落入其中,或者儿童在奔跑途中,造成餐盘上的食物倾倒而导致食物烫伤儿童的情况发生;同时现有的送餐机器人一次性多半只能运送单个餐盘上的食物,这样会大大降低其工作效率的降低;同时由于餐厅的空间大,这样食物在送餐机器人从使用者手中到顾客的手中的这段时间,容易让食物的口感以及味道降低,从而影响了食物的品质;同时由于餐厅销售的食物如汤类、甜品、肉类食物,其盛放的餐盘的高度也大小不一,这样会导致在盛放的过程中,盛放不下的情况发生,因此,本发明设计了机器人动态场景下路径自动规划装置送餐机器人。
技术实现要素:
4.本发明的目的在于提供机器人动态场景下路径自动规划装置送餐机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:机器人动态场景下路径自动规划装置送餐机器人,包括送餐机器人,所述送餐机器人包括机器人头部、机器人颈部和机器人身部,所述机器人头部的顶部和底部之间竖直固定连接有分隔板,所述分隔板将机器人头部分为电器元件安装区和餐盘放置区,所述机器人头部中设置有具有多级电动伸缩杆的调节机构,所述机器人头部的顶板处设置有具有加热丝的恒温机构。
6.优选的,所述调节机构包括直线模组、多级电动伸缩杆、伸缩组件、餐盘和控制器,所述送餐机器人的顶部和底部之间位于电器元件安装区中竖直固定安装有三根直线模组,三根所述直线模组的滑动端的同一侧上均水平固定连接有多级电动伸缩杆,三根所述多级电动伸缩杆的三根所述多级电动伸缩杆的滑动端上均固定连接有固定套,三根所述固定套远离多级电动伸缩杆的一端上均固定连接有餐盘上均固定连接有固定套,三根所述固定套远离多级电动伸缩杆的一端上均固定连接有餐盘。
7.优选的,三根所述直线模组的滑动端的同一侧面均水平固定连接有伸缩组件,所
述伸缩组件从左至右由多根直径从大到小的方形筒组成,从大到小的方形筒依次套接,最小的方形筒均固定连接至餐盘的一侧上。
8.优选的,三根所述多级电动伸缩杆和三根直线模组均内接控制器和锂电池,三根所述多级电动伸缩杆从上至下依次分为第一多级电动伸缩杆、第二多级电动伸缩杆和第三多级电动伸缩杆,所述第一多级电动伸缩杆的最大伸长行程是第二多级电动伸缩杆三分之二,所述第二多级电动伸缩杆的最大伸长行程是第三多级电动伸缩杆的三分之二。
9.优选的,所述机器人头部的一侧上内嵌安装有卷帘门,所述卷帘门的内部绕卷安装有led透明卷帘板,所述卷帘门内接锂电池。
10.优选的,所述恒温机构包括加热丝和恒温控制器,所述机器人头部的顶板处开设有凹槽,所述凹槽中内嵌安装有加热丝,所述加热丝内接恒温控制器和锂电池。
11.优选的,所述恒温机构包括加热丝和恒温控制器,所述机器人头部的顶板处开设有凹槽,所述凹槽中内嵌安装有加热丝,所述加热丝内接恒温控制器和锂电池。
12.与现有技术相比,本发明的有益效果:
13.本发明中,设置的调节机构,通过设置的三个直线模组、多级电动伸缩杆和伸缩组件,使送餐机器人一次性可以运送多个餐盘,解决了现有的送餐机器人一次性只能运送单个餐盘的缺点,设置的调节机构,具有设计新颖、节省运送时间的优点;
14.本发明中,设置的,设置的调节机构,将三个多级电动伸缩杆的行程设计不一,使用者和用餐者在拿取盘中的实物的时候便于存取,同时也可以根据餐盘的大小来调整上下两个餐盘的间距,使之具有灵活运用和调节简单的优点;
15.本发明中,设置的恒温机构,在机器人头部设置的加热丝,将餐盘上的食物放置在机器人头部的餐盘放置区,使食物保持恒温,避免其口感下降或在送到顾客手中,导致食物变凉的情况发生;
16.本发明中,将现有的送餐机器人送餐位置多是暴露在外,将其设计在密闭的空间中,避免了食物在运送的过程中,导致食物掉入异物的麻烦,同时也避免了儿童在餐厅中奔跑导致食物倾倒烫伤孩子的危险事情发生。
附图说明
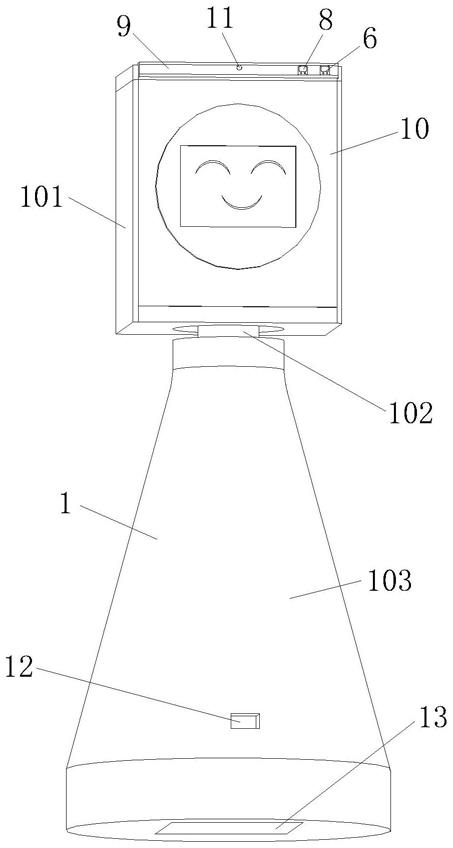
17.图1为本发明中的整体结构示意图;
18.图2为本发明中的机器人头部和调节机构结构示意图;
19.图3为本发明中的调节机构结构示意图;
20.图4为本发明中的恒温机构结构示意图;
21.图5为本发明中的系统结构示意图。
22.图中:1、送餐机器人;101、机器人头部;102、机器人颈部;103、机器人身部;2、直线模组;3、多级电动伸缩杆;4、伸缩组件;5、餐盘;6、控制器;7、加热丝;8、恒温控制器;9、卷帘门;10、led透明卷帘板;11、障碍物感应器;12、usb插孔;13、锂电池。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术工作人员员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.请参阅图1至图4,本发明提供一种技术方案:机器人动态场景下路径自动规划装置送餐机器人,包括送餐机器人1,送餐机器人1包括机器人头部 101、机器人颈部102和机器人身部103,机器人头部101的顶部和底部之间竖直固定连接有分隔板,分隔板将机器人头部101分为电器元件安装区和餐盘放置区,机器人头部101中设置有具有多级电动伸缩杆3的调节机构,机器人头部101的顶板处设置有具有加热丝7的恒温机构。
25.本实施例中,如图2和图3所示,调节机构包括直线模组2、多级电动伸缩杆3、伸缩组件4、餐盘5和控制器6,送餐机器人1的顶部和底部之间位于电器元件安装区中竖直固定安装有三根直线模组2,三根直线模组2的滑动端的同一侧上均水平固定连接有多级电动伸缩杆3,三根多级电动伸缩杆3的三根多级电动伸缩杆3的滑动端上均固定连接有固定套,三根固定套远离多级电动伸缩杆3的一端上均固定连接有餐盘5上均固定连接有固定套,三根固定套远离多级电动伸缩杆3的一端上均固定连接有餐盘5。
26.本实施例中,如图2和图3所示,三根直线模组2的滑动端的同一侧面均水平固定连接有伸缩组件4,伸缩组件4从左至右由多根直径从大到小的方形筒组成,从大到小的方形筒依次套接,最小的方形筒均固定连接至餐盘5 的一侧上。
27.本实施例中,如图2和图3所示,三根多级电动伸缩杆3和三根直线模组2均内接控制器6和锂电池13,三根多级电动伸缩杆3从上至下依次分为第一多级电动伸缩杆、第二多级电动伸缩杆和第三多级电动伸缩杆,第一多级电动伸缩杆的最大伸长行程是第二多级电动伸缩杆三分之二,第二多级电动伸缩杆的最大伸长行程是第三多级电动伸缩杆的三分之二。
28.本实施例中,如图1所示,机器人头部101的一侧上内嵌安装有卷帘门9,卷帘门9的内部绕卷安装有led透明卷帘板10,卷帘门9内接锂电池13。
29.本实施例中,如图1和图2所示,恒温机构包括加热丝7和恒温控制器8,机器人头部101的顶板处开设有凹槽,凹槽中内嵌安装有加热丝7,加热丝7 内接恒温控制器8和锂电池13。
30.本实施例中,如图1所示,控制器6和恒温控制器8均安装至卷帘门9 的同一侧上,卷帘门9位于控制器6和恒温控制器8的同一侧的中心位置安装有障碍物感应器11,机器人身部103的底部内嵌安装有锂电池13,机器人身部103的正前方的底部处设置有usb插孔12;usb插孔12用于给锂电池电源13充电,锂电池电源13用于给送餐机器人1上的电器元件供电。
31.本实施例中,如图1和图5所示,机器人头部101中安装有cpu、计算元件和执行元件,cpu、计算元件和执行元件均内接锂电池13;计算元件采用的是机器人常用的rrt算法,当障碍物感应器11感应到前方有障碍物的时候,障碍物感应器11会将信号传输给cpu,cpu会将接收的信号传输到计算元件中,后rrt算法会自动规划路线,后机器人的执行元件即按照自动规划后的新路线避开障碍物继续行走,此为现有公开的技术,再次不过多的赘述。
32.本发明的使用方法和优点:该种机器人动态场景下路径自动规划装置送餐机器人在使用时,工作过程如下:
33.如图1和图5所示,当准备在餐盘5上准备放置餐盘的时候,只需要人工先打开卷帘
门9的启动开关,使其上升,后人工启动控制器6,使三根多级电动伸缩杆3同时伸出最大行程,多级电动伸缩杆3的伸出会带动伸缩组件4 同步伸出,后使用者只需要将餐盘依次放置在餐盘5上即可,设置的三个餐盘5,具有一次性可放置多个餐盘的优点,避免了现有的送餐机器人一次性只能盛放单个的餐盘的局限性;
34.当放置的餐盘其高度较高的时候,比方从上至下第三个餐盘5上放置的餐盘过高的时候,此时只需要启动控制器6,将从上至下的第二个直线模组2 的滑动端调至到顶部,将第三个直线模组2的滑动端调整到底部,这样直线模组2的移动同步带动多级电动伸缩杆3、伸缩组件4和餐盘5同步移动,也就使从上至下的第二个餐盘5和第三个餐盘5之间的间距增大,便可以放置过高的餐盘到点歌餐盘5上,上述操作,使多个餐盘5可以放置不同高度的餐盘,具有调整简单,缩小占地空间和灵活运用的优点,同时如图3所示,将三个多级电动伸缩杆3的行程设置为不一,并且将三个餐盘5从上至下设置成斜行,这样便于使用者包括用餐者拿取实物的优点;
35.在冬季的时候,使用者可启动加热丝7的开关,同时通过恒温控制器8 控制机器人头部101中的温度,这样使送餐机器人1从使用者的位置到用餐者的位置之间,也保障了饭菜的味道和品质,同时将现有的送餐机器人的送餐机构暴露在外而将其设置于机器人头部101的内部,主要也是防止现有的送餐机器人在送餐的过程中,来往的顾客在行走的过程中,不小心头发掉落到餐盘中,或者奔跑的孩子误撞刀机器人头部101,导致餐盘中的菜打翻造成烫伤孩子的危险发生。
36.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术工作人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
