技术特征:
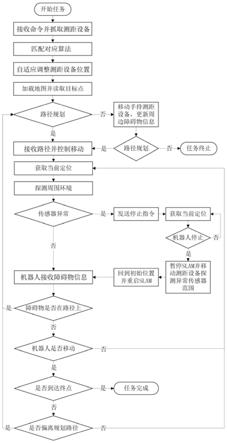
1.一种人形机器人导航方法,基于机器人系统,其特征在于:机器人系统包括机器人以及若干种可手持移动的测距设备,机器人上设置机械手和若干位置固定的传感器;所述人形机器人导航方法包括抓取测距设备流程和路径规划流程,当发生事件a时,机器人进入抓取测距设备流程,事件a发生于路径规划流程之前、之中、之后的任一时间点;路径规划流程包括以下步骤:s1:机器人加载已有地图;s2:机器人加载目标点位置信息和机器人的实时位置信息;s3:机器人结合地图、传感器和/或测距设备获取的周围障碍物信息、机器人的实时位置信息、目标点位置信息,基于slam算法生成到达目标点的路径;s4:机器人根据已生成的路径行进;抓取测距设备流程包括以下步骤:t1:机器人的机械手接收抓取命令;t2:机器人的机械手对命令所指定种类的测距设备进行抓取。2.如权利要求1所述的人形机器人导航方法,其特征在于:所述抓取测距设备流程在t2这一步骤之后,还具有以下步骤:t3:机器人根据测距设备种类匹配相对应slam算法;t4:机器人自适应调整测距设备位置。3.如权利要求1所述的人形机器人导航方法,其特征在于:所述事件a包括以下事件之中的至少一个:事件一:机器人接收到人为指令,人为指定机械手所需抓取的测距设备种类;事件二:机器人进行自行场景检测来判断所需抓取测距设备种类;事件三:机器人在路径规划流程中,无法生成到达目标点的路径;事件四:机器人上位置固定的传感器出现异常。4.如权利要求3所述的人形机器人导航方法,其特征在于:所述事件二中自行场景检测出的场景包括两种,第一种为室内环境,第二种为室外环境。5.如权利要求4所述的人形机器人导航方法,其特征在于:所述室内环境下,机器人选择抓取的测距设备为单目摄像头或双目摄像头,室外环境下,机器人选择抓取的测距设备为激光雷达。6.如权利要求3所述的人形机器人导航方法,其特征在于:当所述机器人已完成抓取测距设备流程、且无法生成到达目标点的路径时,机器人执行以下步骤:s5:机器人移动所抓取的测距设备,读取机器人周围不同高度和角度的数据,更新周围障碍物信息;s6:机器人根据s5中周围障碍物信息重新进行路径规划。7.如权利要求3所述的人形机器人导航方法,其特征在于:当所述机器人监测到传感器发生异常、且机器人已完成抓取测距设备流程时,机器人进行以下步骤:s7:机器人判断自身是否停止移动;判断为是时,进入s7.1~s7.3步骤,s7.1:机器人暂停当前slam定位;s7.2:机器人移动所抓取的测距设备,探测异常传感器的探测范围,更新周围障碍物信
息;s7.3:机器人重启slam定位;s7.4:机器人继续执行导航;判断为否时,重新进入s7步骤,机器人重新判断自身是否停止移动。8.如权利要求1~7任一所述的人形机器人导航方法,其特征在于:所述机器人上位置固定的传感器返回数据的同时会提供数据可信数值,如果该参数超出设定数值,就认为此刻该传感器数据不可靠,并判断为该传感器异常。9.如权利要求8所述的人形机器人导航方法,其特征在于:所述机器人在s4步骤中周期性判断是否发生移动,若是无移动,判断传感器是否异常。10.如权利要求6或7所述的人形机器人导航方法,其特征在于:每一种所述测距设备预设有相对应的移动路径,当机器人进入t2步骤时,机器人根据测距设备种类所对应的移动路径来移动所抓取的测距设备。11.如权利要求1~7任一所述的人形机器人导航方法,其特征在于:所述机器人在s4步骤中接收来自传感器和/或测距设备实时监测的周围障碍物信息,结合已规划的路径来判断该路径上是否存在障碍物,如果存在,重新规划路线。12.如权利要求1~7任一所述的人形机器人导航方法,其特征在于:所述机器人在s4步骤中根据实时位置信息与目标点位置信息判断是否到达终点,如果实时位置在目标点的预设可接受范围内,机器人移动完成,如果不在预设可接受范围内,则判断是否偏离路径,偏离时重新规划路径,非偏离时,判断传感器是否异常。13.如权利要求1~7任一所述的人形机器人导航方法,其特征在于:所述机器人上设置有测距设备放置位点,为储物格形式,每个储物格具有独立id,测距设备可发送所在储物格id和测距设备型号信息到机器人。14.如权利要求13所述的人形机器人导航方法,其特征在于:所述t2步骤中,机器人解析接收到的命令中测距设备型号和所在储物格id,机械手移动到指定储物格抓取测距设备;t2步骤之后还包括以下步骤:机械人发送启动命令到测距设备;机械人将所抓取的测距设备移动到设定位置;机械人通过测距设备内配置的imu对测距设备的位置和角度进行微调。
技术总结
本发明涉及一种人形机器人导航方法,基于机器人系统,包括机器人及若干种可移动的测距设备,机器人上设机械手和若干位置固定的传感器;导航方法包括抓取测距设备流程和路径规划流程;抓取测距设备流程:机器手接收抓取命令,机械手对命令所指定种类的测距设备进行抓取,机械手自适应调整测距设备位置,机器人根据测距设备种类匹配相对应SLAM算法。路径规划流程:机器人结合地图信息、传感器和/或测距设备获取的周围障碍物信息、机器人的实时位置信息、目标点位置信息,基于SLAM算法生成到达目标点的路径,机器人行进过程中实时监控机器人位置判断是否偏离路径,偏离时调整路径。本发明可实现机器人灵活更换移动测距设备进行辅助导航以适应不同场景。助导航以适应不同场景。助导航以适应不同场景。
技术研发人员:杨华 濮正楠 宋华 詹犇 张涛 郑秀谦 龚圆杰 赵保文
受保护的技术使用者:广东纯米电器科技有限公司
技术研发日:2022.01.14
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。