1.本公开涉及支持机器人的参数集的调整的方法、程序以及信息处理装置。
背景技术:
2.以往,存在设定机器人的控制参数的技术。在专利文献1的技术中,服务器计算机导出与“缩短动作时间优先”、“轨迹精度优先”、“能耗量最小化优先”等优化的目的相应的多个调整用参数。针对算出的各个调整用参数,计算优化的效果。例如,在优化的目的选择了“缩短动作时间优先”时,计算动作时间缩短的比例,在选择了“能耗量最小化优先”时,计算能耗量的减少比例。操作人员确认这些优化的效果,选择导入哪个调整用参数。机器人控制盘将当前的调整用参数的数据变更为从服务器计算机接收到的调整用参数的数据。
3.专利文献1:日本专利特开2003-103482号公报
4.但是,即使将优化的效果表示为例如“动作时间缩短的比例”,对于没有足够机器人的参数设定经验的用户来说,也无法掌握其具体的动作时间优异到何种程度。另外,对于以“缩短动作时间优先”为优化目的而得到的参数,不判断“轨迹精度”的值对于用户而言是否在允许范围内。
5.本技术的发明人改变专利文献1的技术,例如对如下方法也进行了研究:预先使用户针对轨迹精度的设想范围指定数值,在该约束下,以“缩短动作时间优先”为优化目的导出参数。但是,若使用户关于轨迹精度预先指定数值,则有可能指定无法实现的数值。在这样的情况下,无法通过优化处理得到调整用参数。
技术实现要素:
6.根据本公开的一方面,提供一种支持机器人的参数集的调整的方法。该方法具备:工序(a),接收规定所述机器人的对象动作的轨迹的轨迹信息;工序(b),响应调整用于控制所述对象动作的参数集的指示,关于预先准备的一个以上的初始参数集,获取使用各个初始参数集使所述机器人执行所述对象动作时的控制结果的评价指标的值;工序(c),将基于关于所述一个以上的初始参数集而获取的所述评价指标的值的一个以上的参考显示显示于显示部;以及工序(d),接收确定所述参数集的优化处理的条件的关于所述评价指标的条件信息的输入,并按照所述条件信息进行所述参数集的优化处理,决定新的参数集的值。
附图说明
7.图1是示出本公开一实施方式的机器人系统的说明图。
8.图2是示出控制装置40的功能块、机器人1~3以及光学系统20的关系的框图。
9.图3是示出参数44a的图。
10.图4是示出按照加减速特性控制的tcp的速度的例子的图。
11.图5是示出tcp的加减速特性所包括的tcp的基准目标加速度ast与惯性i的关系的曲线图。
12.图6是示出设定装置600的结构的框图。
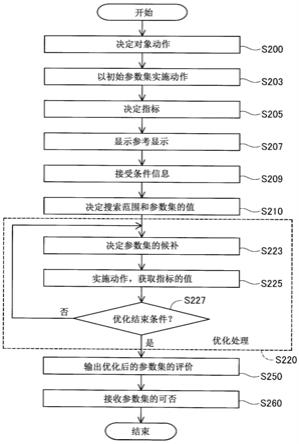
13.图7是示出支持机器人1~3的参数集的调整的方法的流程图。
14.图8是示出动作结束时的tcp的位置的曲线图。
15.图9是将横轴设为频率来表示机器人执行动作时产生的声音的大小(db)的曲线图。
16.图10是示出在图7的步骤s205中显示于设定装置600的显示器602的用户界面画面i205的图。
17.图11是示出在图7的步骤s207中显示于设定装置600的显示器602的用户界面画面i207的图。
18.图12是示出通过反复进行步骤s223、s225、s227的处理而获得的参数集的动作时间ot的值以及超调量os的值的散布图。
19.图13是示出在步骤s250中示出的用户界面画面i251的图。
20.图14是示出在实施方式二的步骤s207中显示于设定装置600的显示器602的用户界面画面i207b的图。
21.图15是示出在实施方式三的步骤s207中显示于设定装置600的显示器602的用户界面画面i207c的图。
22.图16是示出在实施方式四的步骤s207中显示于设定装置600的显示器602的用户界面画面i207d的图。
23.图17是示出在实施方式五的步骤s207中显示于设定装置600的显示器602的用户界面画面i207e的图。
24.图18是示出在实施方式六的步骤s207中显示于设定装置600的显示器602的用户界面画面i207f的图。
25.附图标记说明
26.a
…
臂、a1~a6
…
臂部件、ast
…
基准目标加速度、at
…
目标价速度、b11~b15
…
按钮、b51
…
按钮、b52
…
按钮、b71
…
按钮、b72
…
按钮、b73
…
按钮、b74
…
按钮、b75
…
按钮、b76
…
按钮、b77
…
按钮、b78
…
按钮、b81
…
按钮、b82
…
按钮、b83
…
按钮、b91
…
按钮、b92
…
按钮、d11
…
选择窗、d12
…
选择窗、d71
…
输入窗、d72
…
输入窗、d73
…
输入窗、d74
…
输入窗、da
…
旋转角度、dc
…
控制量、de
…
偏差、dt
…
目标角度、e1~e6
…
编码器、i
…
惯性、i205
…
用户界面画面、i207
…
用户界面画面、i207b
…
用户界面画面、i207c
…
用户界面画面、i207d
…
用户界面画面、i207e
…
用户界面画面、i207f
…
用户界面画面、i251
…
用户界面画面、imax
…
最大值、imin
…
最小值、ith
…
惯性的阈值、j1~j6
…
关节、kpd
…
微分增益、kpi
…
积分增益、kpp
…
比例增益、kpd
…
微分增益、kpi
…
积分增益、kpp
…
比例增益、l
…
位置、l71
…
显示、l72
…
显示、l73
…
显示、l74
…
显示、l75
…
显示、l76
…
显示、l81
…
显示、l82
…
显示、l83
…
显示、l91
…
显示、l92
…
显示、lmax
…
超调、lpm
…
允许误差、lt
…
目标位置、m1~m6
…
电机、os
…
超调量、ot
…
动作时间、r71
…
参考显示、r72
…
参考显示、r73
…
参考显示、r74a、74b
…
参考显示、r75a、75b
…
参考显示、r76a、76b
…
参考显示、r77
…
参考显示、r78
…
参考显示、r79
…
参考显示、r81
…
参考显示、r82
…
参考显示、r83
…
参考显示、rt
…
频带、s1
…
加速度传感器、t
…
基台、tcp
…
工具中心点、ts
…
tcp的位置偏移小于lpm的时刻、u1
…
对应关系、u2
…
对应关系、v
…
速度、w
…
对象物、a0
…
限制最大加速度、a1
…
上限最大加速度、b
…
基准
目标加速度的倾斜度、t1
…
时刻、t2
…
时刻、t3
…
时刻、t4
…
时刻、1
…
机器人、2
…
机器人、3
…
机器人、20
…
光学系统、21
…
拍摄部、22
…
照明部、23
…
夹爪、40
…
控制装置、42
…
检测部、43
…
控制部、43a
…
位置控制部、43d
…
伺服系统、44
…
存储部、44a
…
参数、44b
…
机器人程序、44c
…
动作参数、44d
…
光学参数、44e
…
力控制参数、44p
…
初始参数、44p1
…
高速参数、44p2
…
标准参数、44p3
…
高精度参数、600
…
设定装置、602
…
显示器、604
…
键盘、605
…
鼠标、610
…
cpu、611
…
动作执行部、612
…
参数搜索部、612a
…
指标决定部、612b
…
新参数决定部、612c
…
参数获取部、612d
…
初始条件决定部、613
…
评价部、613a
…
动作时间测量部、613b
…
超调量测量部、613c
…
振动量测量部、613d
…
噪音等级测量部、613e
…
推断寿命计算部、613f
…
转矩比例计算部、614
…
显示控制部、615
…
轨迹受理部、617
…
条件受理部、630
…
ram、630a
…
参数、630b
…
条件信息、630c
…
机器人程序、630d
…
初始参数、630e
…
高速参数、630f
…
标准参数、630g
…
高精度参数、640
…
rom
具体实施方式
27.a.实施方式一:
28.a1.机器人系统的构成:
29.图1是示出本公开一实施方式的机器人系统的说明图。作为本公开一实施方式的机器人系统具备机器人1~3、控制装置40以及设定装置600。
30.控制装置40控制机器人1~3。控制装置40通过电缆与机器人1~3连接为能够通信。控制装置40具备作为处理器的cpu、ram以及rom。ram包括主存储器和辅助存储装置。控制装置40的cpu通过将存储于辅助存储装置的计算机程序加载到主存储器并执行而使机器人进行动作。
31.设定装置600生成规定机器人1~3的动作的动作程序,并设定动作程序的参数。设定装置600通过电缆与控制装置40连接为能够通信。由设定装置600生成的动作程序以及由设定装置600设定的参数被发送到控制装置40。控制装置40按照从设定装置600接收到的动作程序以及参数使机器人1~3进行动作。关于设定装置600的结构,在后面进行说明。
32.机器人1~3是通过进行示教而能够进行各种作业的通用机器人。更具体而言,机器人1~3是通过在臂a装配各种末端执行器来进行使用的单臂机器人。机器人1~3是分别具备不同的末端执行器21、22、23的六轴机器人。在本实施方式中,在机器人1~3中,臂a、轴的结构相同。
33.以机器人3为例,对机器人1~3的结构进行说明。机器人3具备基台t、六个臂构件a1~a6以及六个关节j1~j6。基台t固定于作业台。基台t以及六个臂构件a1~a6通过关节j1~j6连结。在本实施方式中,关节j2、j3、j5是弯曲关节。关节j1、j4、j6是扭转关节。在本说明书中,也将各关节j1~j6中的旋转轴称为“工作轴”。
34.在臂a中位于前端的臂构件a6上装配有末端执行器。机器人1~3通过驱动六轴的臂a,能够将末端执行器配置于预定范围内的任意位置,使其具有任意的姿势、即角度。
35.在机器人1~3上安装有互不相同的末端执行器。安装于机器人1的末端执行器是拍摄部21。拍摄部21能够拍摄视野内的图像。拍摄部21具备能够调整曝光时间和光圈的机构。安装于机器人2的末端执行器是照明部22。照明部22能够向照射范围照射光。照明部22具备能够调整亮度的机构。以下,也将拍摄部21以及照明部22称为“光学系统”。安装于机器
人3的末端执行器是夹具23。夹具23能够把持对象物w。
36.在本实施方式中,将相对于机器人1~3所具备的末端执行器相对地固定的位置定义为工具中心点(tcp)。tcp的位置为末端执行器的基准的位置。以tcp为原点,定义tcp坐标系。tcp坐标系是相对于末端执行器相对地固定的三维正交坐标系。
37.在臂a中位于前端的臂构件a6上与末端执行器一起装配有加速度传感器s1。加速度传感器s1能够获取关于相互垂直的三个轴的方向的加速度以及绕这些轴的角速度的信息。基于这些信息,控制装置40识别末端执行器的倾斜度、包括末端执行器的速度和朝向在内的移动速度、以及末端执行器的当前位置。
38.在本说明书中,将规定设置有机器人1~3的空间的坐标系称为“机器人坐标系”。机器人坐标系是由在水平面上相互正交的x轴和y轴、以及以铅直向上为正方向的z轴规定的三维正交坐标系(参照图1上段的左侧)。z轴上的负方向与重力方向一致。通过x、y、z方向的位置而能够表现三维空间中的任意的位置。用rx表示绕x轴的旋转角,用ry表示绕y轴的旋转角,用rz表示绕z轴的旋转角。通过rx、ry、rz方向的旋转角而能够表现三维空间中的任意的姿势。以下,在本说明书中,在表述为“位置”的情况下,也可以意指姿势。
39.在本实施方式中,预先定义了坐标系之间的关系。其结果,各坐标系中的坐标的值能够相互转换。即,tcp坐标系、传感器坐标系以及机器人坐标系中的位置、矢量能够相互转换。在此,为了容易理解技术,假设控制装置40以机器人坐标系控制tcp的位置来对技术内容进行说明。
40.a2.机器人的控制:
41.(1)机器人的结构和控制装置的功能:
42.图2是示出控制装置40的功能块、机器人1~3以及光学系统20的关系的框图。机器人1~3分别具备作为致动器的电机m1~m6和作为传感器的编码器e1~e6。
43.电机m1~m6分别驱动关节j1~j6。具体而言,机器人的臂a的控制是通过控制电机m1~m6来进行的。在向各电机m1~m6供给电力的电源线上分别具备电流计。控制装置40能够经由这些电流计测量供给到各电机m1~m6的电流。编码器e1~e6分别检测电机m1~m6的旋转角度。
44.控制装置40具备存储部44。控制装置40作为检测部42以及控制部43发挥功能。
45.检测部42与构成光学系统20的拍摄部21和照明部22连接。检测部42检测对象物,并指定对象物的位置以及姿势。控制部43进行机器人1~3的末端执行器的位置控制。以下,对末端执行器的位置控制进行说明。
46.(2)机器人的末端执行器的位置控制:
47.在控制部43中,电机m1~m6的旋转角度的组合与机器人坐标系中的tcp的位置的对应关系u1存储于未图示的存储介质(参照图2中段的右侧)中。在控制部43中,坐标系彼此的对应关系u2进一步存储于未图示的存储介质中。需要指出,对应关系u1、u2也可以存储于存储部44中。
48.控制部43能够基于对应关系u2将任意坐标系中的矢量变换为其它坐标系中的矢量。例如,控制部43能够基于加速度传感器s1的输出获取传感器坐标系中的机器人1~3的加速度,并转换为机器人坐标系中的tcp的加速度。
49.控制部43通过驱动臂a来控制机器人1~3的各部位的位置。控制部43具备作为功
能部的位置控制部43a以及伺服系统43d(参照图2中段)。
50.(i)伺服系统43d中的处理:
51.伺服系统43d执行伺服控制。更具体而言,伺服系统43d执行使编码器e1~e6的输出所示的电机m1~m6的旋转角度da与作为控制目标的目标角度dt一致的反馈控制。伺服系统43d使用旋转角度da与目标角度dt的偏差de、该偏差de的积分以及该偏差de的微分,执行关于位置的pid控制。图2中示出了比例增益kpp、积分增益kpi、微分增益kpd(参照图2中段的左侧)。
52.伺服系统43d使用用到上述kpp、kpi、kpd的关于位置的pid控制的输出与旋转角度da的微分的偏差、该偏差的积分、该偏差的微分,执行关于速度的pid控制。图2中示出了比例增益kvp、积分增益kvi、微分增益kvd(参照图2中段的左侧)。
53.作为以上处理的结果,决定控制量dc。针对电机m1~m6各自决定控制量dc。控制部43以各电机m1~m6的控制量dc控制各电机m1~m6。控制部43控制电机m1~m6的信号是pwm(pulse width modulation:脉冲宽度调制)调制后的信号。需要指出,伺服系统43d使用的伺服增益kpp、kpi、kpd、kvp、kvi、kvd是能够变更的参数。以下,在对位置控制部43a中的处理进行说明之前,对机器人1~3的参数进行说明。
54.(ii)机器人的参数:
55.在存储部44中存储有各种参数44a、用于控制机器人1~3的机器人程序44b以及初始参数44p(参照图2中段的左侧)。机器人程序44b主要指示机器人1~3所实施的作业的序列、即动作的顺序。机器人程序44b是通过预先定义的指令的组合来描述的。
56.参数44a表示为实现各动作所需的具体的值。参数44a被描述为各指令的自变量。伺服增益kpp、kpi、kpd、kvp、kvi、kvd是参数44a的一部分。参数44a能够按每个动作被优化。
57.在本实施方式中,参数44a以及机器人程序44b是通过使用设定装置600对机器人进行示教而生成的,存储于存储部44(参照图2下段的右侧)。存储于存储部44的参数44a以及机器人程序44b可由设定装置600修正。
58.图3是示出参数44a的图。参数44a包括动作参数44c、光学参数44d以及力控制参数44e。光学参数44d是用于控制机器人1的拍摄部21和机器人2的照明部22的参数(参照图1中段的左侧以及图3上段)。
59.动作参数44c是与机器人1~3的臂a的动作相关的参数。动作参数44c在位置控制中被参照。机器人1~3进行的一系列作业被分为多个动作。实施各动作时的动作参数44c是通过示教而生成的。
60.动作参数44c包括指示各动作中的“起点”和“终点”的参数(参照图3中段)。起点和终点可以用各种坐标系定义。在本实施方式中,控制对象的机器人的tcp的“起点”以及“终点”用机器人坐标系定义。定义关于机器人坐标系的各轴的平移位置和旋转位置。
61.动作参数44c包括多个动作中的tcp的“加减速特性”(参照图3中段)。通过加减速特性规定机器人1~3的tcp从各动作的起点移动到终点时各时刻下的tcp的速度。
62.图4是示出按照加减速特性控制的tcp的速度的例子的图。在图4中,在从起点处的tcp的移动开始时刻t1直至tcp到达终点的时刻t4为止的各时刻,规定了tcp的速度v。在图4的例子中,在时刻t1~t2的期间,tcp以目标加速度进行加速,在时刻t2~t3的期间保持一定的速度,在时刻t3~t4的期间,tcp以目标加速度进行减速。在本实施方式中,加速时的目
标加速度的绝对值的大小与减速时的目标加速度的绝对值的大小相同。
63.加减速特性可以用各种坐标系定义。在本实施方式中,通过加减速特性描述的速度是关于控制对象的机器人的tcp的速度。该tcp的速度用机器人坐标系定义。即,定义关于机器人坐标系的各轴的平移速度和旋转速度(角速度)。
64.在机器人1~3中,某关节前的机器人的构成部分的形状可能根据位于其前的关节的角度而变化。因此,机器人1~3的某关节前的惯性、即惯性力矩可能根据位于其前的关节的角度而变化。例如,在六个臂构件a1~a6采取排成一列的姿势时,以关节j1为基准的旋转的惯性最大(参照图1)。此时,六个臂构件a1~a6的整体的重心位于离关节j1最远的位置。另一方面,当臂a采取六个臂构件a1~a6的整体的重心最接近关节j1的姿势时,以关节j1为基准的旋转的惯性最小。电机可实现的加速度根据电机驱使的对象物的惯性而变化。因此,对驱动各关节的电机指示的加速度根据各个关节之前的惯性决定(参照图4的t1~t2、t3~t4)。tcp的加速度如下确定。
65.图5是示出tcp的加减速特性所包括的tcp的基准目标加速度ast与惯性i的关系的曲线图。关于各关节j1~j6,作为动作参数44c之一,确定了限制最大加速度a0。限制最大加速度a0是在该关节前的机器人的构成的惯性i为最大值imax时电机可稳定地实现的加速度。另外,关于各关节j1~j6,作为动作参数44c之一,确定了上限最大加速度a1。上限最大加速度a1是在该关节前的机器人的构成的惯性i为规定值ith以下时电机可稳定地实现的加速度。惯性ith是该关节前的机器人的构成的惯性的最小值imin与最大值imax之间的值。需要指出,限制最大加速度a0以及上限最大加速度a1是以机器人保持预定的额定负载为前提而决定的。
66.由图5可知,在该关节前的惯性为规定值ith以下时,基准目标加速度ast为一定值a1。在该关节前的惯性大于规定值ith时,基准目标加速度ast以倾斜度b相对于惯性线性地减少。即,b是基准目标加速度ast的变化率。
67.b={(a0-a1)/(imax-ith)}
…
(eq1)
68.进而,基准目标加速度ast根据机器人所保持的负载的大小进行校正。tcp的目标加速度at是通过基准目标加速度ast乘以负载校正系数cl而得到的(参照图4的t1~t2、t3~t4)。
69.at=cl
×
ast
…
(eq2)
70.负载校正系数cl例如由下式确定。当机器人所保持的负载w为额定负载w0时,c=1。当机器人所保持的负载w大于额定负载w0时,c<1。当机器人所保持的负载w小于额定负载w0时,c>1。
71.c={-(w-w0)/(wmax-wmin)} 1
72.=d
×
(w-w0) 1
73.在此,w是机器人所保持的负载的大小。
74.w0是作为基准的额定负载。
75.wmax是机器人可保持的负载的最大值。
76.wmin是机器人可保持的负载的最小值。
77.d={-1/(wmax-wmin)}
78.作为动作参数44c的一部分的加减速特性的参数包括限制最大加速度a0、上限最
大加速度a1、基准目标加速度ast的倾斜度b、负载校正系数cl的倾斜度d(参照图3中段)。通过后述的处理使这些参数优化,从而能够按每个动作自动地设定工作轴的加减速的变化。
79.动作参数44c包括伺服增益kpp、kpi、kpd、kvp、kvi、kvd(参照图3中段)。控制部43进行调整,以使伺服系统43d所适用的伺服增益kpp、kpi、kpd、kvp、kvi、kvd达到作为动作参数44c而存储的值。在本实施方式中,伺服增益的值按各个动作而确定。不过,在后述的优化等中,伺服增益也可以按各个更短的区间而确定。
80.力控制参数44e(参照图3下段)是与机器人1~3的力控制相关的参数,在力控制时被参照。需要指出,为了容易地理解技术,在本说明书中省略对力控制的详细内容的说明。
81.力控制参数44e包括指示“起点”、“终点”、“加减速特性”以及“伺服增益”的参数。在力控制参数44e中,起点、终点、加减速特性、伺服增益与属于动作参数44c的起点、终点、加减速特性、伺服增益(参照图3中段)是同样的。
82.不过,在力控制的情况下,存在起点及终点中的至少一部分在一个动作中不被定义的情况。例如,在某动作中,在进行碰撞避免、仿形控制以使作用于某一方向的力为0时,有时也不会定义该方向上的起点及终点而定义位置可任意变化的状态以使该方向的力为0。
83.力控制参数44e包括指示“力控制坐标系”的信息(参照图3下段)。力控制坐标系是用于定义力控制的目标力的坐标系。在进行优化之前,目标力矢量的起点是力控制坐标系的原点,力控制坐标系的一轴朝向目标力矢量的方向。在机器人的示教中定义力控制中的各种目标力时,对各作业的各动作中的目标力的作用点进行示教。例如,使对象物的一点碰到其它物体,在两者的接触点从对象物对其它物体作用一定的目标力的状态下,使对象物的朝向发生变化的情况下,如下那样重新定义力控制坐标系。即,对象物与其它物体接触的点成为目标力的作用点,定义以该作用点为原点的力控制坐标系。
84.力控制参数44e包括用于指定以力控制的目标力所作用的点为原点且一轴朝向目标力的方向的坐标系、即力控制坐标系的信息作为参数。需要指出,该参数可以进行各种定义。例如,用于指定力控制坐标系的参数可以通过指示力控制坐标系与其它坐标系(机器人坐标系等)的关系的数据来定义。
85.力控制参数44e包括“目标力”(参照图3下段)。目标力是在各种作业中作为应作用于任意点的力而被示教的力,通过力控制坐标系定义。指示目标力的目标力矢量被定义为目标力矢量的起点和从起点起的六轴分量、即三轴的平移力以及三轴的转矩,通过力控制坐标系来表现。需要指出,若利用力控制坐标系与其它坐标系的关系,则能够将该目标力转换为任意的坐标系、例如机器人坐标系中的矢量。
86.力控制参数44e包括“阻抗参数”(参照图3下段)。阻抗控制是通过电机m1~m6的驱动力来实现虚拟的机械阻抗的控制。在阻抗控制中,tcp虚拟地具有的质量被定义为虚拟惯性系数m。tcp虚拟地受到的粘性阻力被定义为虚拟粘性系数d。tcp虚拟地受到的弹性力的弹簧常数被定义为虚拟弹性系数k。阻抗参数是这些m、d、k。阻抗参数是关于相对于机器人坐标系的各轴的平移和旋转而定义的。
87.在本实施方式中,力控制坐标系、目标力、阻抗参数按各机器人所执行的各动作而设定值(参照图3)。但是,也可以按更短的各区间设定值。
88.初始参数44p表示为了实现动作所需的具体的值(参照图2下段的左侧)。参数44a
是针对各动作而确定的,与此相对地,初始参数44p是以能够应对各种动作的方式而确定的通用的参数。初始参数44p在机器人1~3和控制装置40从工厂出货时预先存储于存储部44。
89.初始参数44p如下确定。首先,决定随机确定起点和终点的100个动作。关于这100个动作,在确定了平均动作速度的下限、超调量的上限、转矩比例的上限、推断寿命的下限等条件的基础上,由设定装置600或其它计算机进行优化处理,以使平均动作速度最大化。其结果,决定满足所设定的条件且平均动作速度大的初始参数。关于动作时间、超调量、转矩比例以及推断寿命等,在后面进行说明。
90.在本实施方式中,初始参数44p包括分别表示为了实现动作所需的具体的值的三组参数。三组参数是(a)超调量大但动作时间短的参数的组、(b)动作时间长但超调量小的参数的组、以及(c)具有它们的中间性质的参数的组。也将超调量大但动作时间短的参数的组称为“高速参数44p1”(参照图2下段的中央部)。也将动作时间长但超调量小的参数的组称为“高精度参数44p3”。也将具有中间性质的参数的组称为“标准参数44p2”。
91.(iii)位置控制部43a中的处理:
92.位置控制部43a执行位置的控制(参照图2中段的左侧)。更具体而言,控制部43以通过线性运算从目标位置导出的旋转角度控制电机m1~m6。在本说明书中,将以通过线性运算从目标位置导出的旋转角度控制电机m1~m6的模式称为“位置控制模式”。
93.在以位置控制模式进行控制的情况下,位置控制部43a决定每个微小动作的目标位置lt。当获得每个微小动作的目标位置lt时,控制部43基于目标位置lt和对应关系u1,将规定机器人坐标系的各轴的方向的动作位置转换为各电机m1~m6的目标的旋转角度即目标角度dt(参照图2中段的右侧)。
94.伺服系统43d参照参数44a获取伺服增益kpp、kpi、kpd、kvp、kvi、kvd,基于目标角度dt导出控制量dc(参照图2中段的左侧)。针对电机m1~m6分别指定控制量dc,通过各电机m1~m6的控制量dc分别控制电机m1~m6。其结果,在各动作中,tcp经由每个微小动作的目标位置lt按照加减速特性从起点移动至终点。
95.a3.设定装置的构成:
96.图6是示出设定装置600的结构的框图。设定装置600生成规定机器人1~3的动作的动作程序(参照图1下段的右侧)。另外,设定装置600设定为了实现各动作所需的具体的参数。为了容易理解技术,图6中仅示出机器人1~3中的机器人3。
97.设定装置600是具备作为输出装置发挥功能的显示器602以及作为输入装置发挥功能的键盘604和鼠标605的计算机。设定装置600还具备作为处理器的cpu610、ram630以及rom640。ram630包括作为半导体存储器的主存储器和作为辅助存储装置的硬盘。cpu610通过将存储于硬盘的计算机程序加载到主存储器并执行而实现包括参数的优化处理在内的各种功能。设定装置600经由接口与机器人3的加速度传感器s1以及控制装置40连接。
98.a4.参数的优化处理:
99.(1)参数的优化处理的流程:
100.图7是示出支持机器人1~3的参数集的调整的方法的流程图。在本实施方式中,在运用机器人1~3之前使动作参数44c中表示加减速特性的参数和表示伺服增益的参数优化(参照图3)。在本说明书中将这些参数的值的组称为“参数集”。图7的处理由设定装置600的cpu610(参照图1下段的右侧以及图6)执行。
101.在步骤s200中,cpu610响应来自用户的指示,决定使加减速特性和伺服增益优化的动作。具体而言,cpu610从控制装置40接收规定由用户指示的动作的轨迹的机器人程序44b和初始参数44p,并存储于ram630。需要指出,在机器人程序44b中,起点、终点等信息已经被指定。在此,假设将由机器人3的夹具23所保持的对象物w从某个地点移动至其它地点的动作被决定为进行优化的动作(参照图1)。
102.在图6中,将在步骤s200中接收机器人程序44b的cpu610的功能部示为“轨迹接受部615”(参照图6下段的中央部)。将存储于ram630的机器人程序示为机器人程序630c(参照图6下段的左侧)。将存储于ram630的初始参数示为初始参数630d(参照图6中段的左侧)。从控制装置40接收的初始参数44p包括高速参数44p1、标准参数44p2以及高精度参数44p3(参照图2下段的左侧)。在图6中将存储于ram630的高速参数、标准参数以及高精度参数分别示为高速参数630e、高精度参数630g以及标准参数630f(参照图6中段的左侧)。
103.在图7的步骤s203中,响应调整参数集这一指示,获取使用初始参数630d使机器人3执行对象动作时的各种指标值。具体而言,用户经由键盘604和鼠标605向cpu610输入调整参数集这一指示。然后,响应该指示,按照在步骤s200中获取的机器人程序630c和初始参数630d中的标准参数630f的参数集,执行机器人3的动作。然后,在该动作的执行期间,获取编码器e1~e6以及加速度传感器s1的输出,获取后述的动作时间、超调量等各种指标的值。例如,将超调量设为0.20mm。
104.在图6中,将在步骤s203中使机器人执行动作的cpu610的功能部示为“动作执行部611”(参照图6上段的中央部)。在图6中,将获取关于机器人的动作的各种指标的值的cpu610的功能部示为“评价部613”(参照图6中段的中央部)。
105.在图7的步骤s205中,cpu610决定用于评价机器人3的控制结果的两个指标、即具有在一方优异的情况下另一方逊色的趋势的第一指标和第二指标。具体而言,按照来自用户的指示决定第一指标和第二指标。第一指标和第二指标是从以下的指标中决定的。
106.(i-1)动作时间:
107.动作时间是从动作的开始到结束的所需时间。在某控制中,动作时间越短,该控制的评价越高。动作时间能够基于动作开始时以及结束时的tcp的目标位置和从编码器e1~e6(参照图2上段)获得的tcp的各时刻的位置来决定。在图6中,将测量动作时间的cpu610的功能部示为“动作时间测量部613a”(参照图6中段的中央部)。需要指出,作为指标,也可以采用平均动作速度。平均动作速度作为动作时间而得到。
108.(i-2)超调量:
109.超调量是动作结束时tcp的位置偏差的最大值。在某控制中,超调量越小,该控制的评价越高。
110.图8是示出动作结束时tcp的位置的曲线图。超调量os作为机器人的tcp的目标位置lt与超调lmax的偏差而被测量。tcp的位置偏差能够基于动作结束时tcp的目标位置lt、从编码器e1~e6(参照图2上段)获得的动作结束时前后的tcp的位置l以及设于机器人的臂的前端的加速度传感器s1的输出而决定。在图6中,将测量超调量的cpu610的功能部示为“超调量测量部613b”(参照图6中段的中央部)。
111.(i-3)动作结束后的振动量:
112.振动量用直至动作结束后tcp的位置偏差变为小于预定的值lpm的时刻ts为止从
目标位置的超过量的绝对值的合计来评价。在某控制中,动作结束后的振动量越小,该控制的评价越高。在图6中,将测量振动量的cpu610的功能部示为“振动量测量部613c”(参照图6中段的中央部)。
113.(i-4)噪音等级:
114.噪音等级是机器人执行动作时产生的声音的大小。在某控制中,噪音等级越小,该控制的评价越高。
115.图9是将横轴作为频率来表示机器人执行动作时所产生的声音的大小(db)的曲线图。噪音等级可如下决定。即,可通过设于各机器人附近的麦克风来收集声音,基于预定的频带rt中包含的声音的大小、即能量来决定噪音等级。通过确定“声音的大小”的评价指标,能够设定参数而抑制给用户带来不快的声音。在图6中,将测量噪声等级的cpu610的功能部示为“噪声等级测量部613d”(参照图6中段的中央部)。
116.(i-5)推断寿命:
117.推断寿命l按照下式(eq3)计算。在某控制中,推断寿命越大,该控制的评价越高。
118.[数学式1]
[0119][0120]
l1:额定寿命时间[时间]
[0121]
k1:旋转速度系数
[0122][0123]
k2:负载率
[0124][0125]
f:负载种类系数
[0126]
[表1]
[0127][0128]
在图6中,将计算推断寿命的cpu610的功能部示为“推断寿命计算部613e”(参照图6中段的中央部)。
[0129]
(i-6)转矩比例:
[0130]
各电机的转矩比例通过“动作过程中给予输出轴的转矩的平均值”/“允许转矩的值”而得到。“允许转矩”是电机能够连续地给予输出轴的转矩。按各电机确定“允许转矩”。“动作过程中给予输出轴的转矩的平均值”可基于对流过电机m1~m6的电流进行测量的电流计的输出而决定。在某控制中,转矩比例越小,该控制的评价越高。在图6中,将计算转矩比例的cpu610的功能部示为“转矩比例计算部613f”(参照图6中段的中央部)。
[0131]
作为cpu610的功能部,图6所示的动作时间测量部613a、超调量测量部613b、振动量测量部613c、噪音等级测量部613d、推断寿命计算部613e以及转矩比例计算部613f是获取关于机器人的动作的各种指标的值的评价部613的一部分(参照图6中段的中央部)。
[0132]
在图7的步骤s205中,决定用于评价机器人3的控制结果的第一指标和第二指标。
[0133]
图10是示出在图7的步骤s205中显示于设定装置600的显示器602的用户界面画面i205的图。用户界面画面i205包括按钮b11~b15和选择窗d11、d12。
[0134]
在用户界面画面i205中,用于评价机器人3的控制结果的三个以上的指标被显示于显示器602。更具体而言,在上段显示动作时间,在下段显示超调量、振动量、噪音等级、推断寿命以及转矩比例。超调量、振动量、噪音等级、推断寿命以及转矩比例是具有在这些评价优异的情况下动作时间逊色、即动作时间延长的趋势的指标。即,超调量、振动量、噪音等级、推断寿命以及转矩比例与动作时间是相互处于折衷关系的指标。
[0135]
用户能够在选择窗d11中选择“1”或者“2”。在将动作时间选作第一指标的情况下,用户在选择窗d11中选择“1”。在将动作时间选作第二指标的情况下,用户在选择窗d11中选择“2”。
[0136]
用户通过在用户界面画面i205中选择按钮b11~b15中任一按钮,能够从超调量、振动量、噪音等级、推断寿命以及转矩比例中选择一个指标。
[0137]
用户能够在选择窗d12中选择“1”或者“2”。在将通过按钮b11~b15所选定的指标选作第一指标的情况下,用户在选择窗d12中选择“1”。在将通过按钮b11~b15所选定的指标选作第二指标的情况下,用户在选择窗d12中选择“2”。
[0138]
在选择窗d11中选择了“1”的情况下,在选择窗d12中自动地选择“2”。在选择窗d11中选择了“2”的情况下,在选择窗d12中自动地选择“1”。在选择窗d12中选择了“1”的情况下,在选择窗d11中自动地选择“2”。在选择窗d12中选择了“2”的情况下,在选择窗d11中自动地选择“1”。在图6中,将控制显示器602的显示来显示用户界面画面的cpu610的功能部示为“显示控制部614”(参照图6下段的中央部)。
[0139]
cpu610响应于来自用户的指示,从用户界面画面i205所显示的三个以上的指标中决定第一指标和第二指标。在图10的例子中,动作时间被选作用于评价参数集的第一指标,超调量被选作用于评价参数集的第二指标。因此,动作时间被决定为第一指标,超调量被决定为第二指标。在图6中,将实现在步骤s205中决定指标的处理的cpu610的功能部示为“指标决定部612a”(参照图6上段的中央部)。
[0140]
通过进行这样的处理,能够在之后的步骤s250中对用户提示能够实现反映了用户意向的性能的参数集。
[0141]
在图7的步骤s207中,cpu610进行基于关于初始参数的参数集获取的作为第二指标的超调量的值的参考显示。具体而言,用户界面画面i207被显示于显示器602。
[0142]
图11是示出在图7的步骤s207中显示于设定装置600的显示器602的用户界面画面i207的图。用户界面画面i207是用于接受条件信息的用户界面画面。“条件信息”是确定用于控制被机器人程序630c规定轨迹的对象动作的参数集的优化处理的条件的信息。用户界面画面i207包括动作模式的显示l71~l73和按钮b71~b73。
[0143]
按钮b71~b73是用于选择由显示l71~l73所表示的动作模式的按钮。按钮b71~b73构成为仅能够选择按钮b71~b73中的一个按钮。
[0144]
动作模式的显示l71~l73表示三个动作模式。显示l71~l73所表示的动作模式是关于作为第二指标的超调量而程度不同的三个条件信息的候补所对应的动作模式。具体而言,显示l71~l73所表示的三个动作模式与初始参数630d中的标准参数630f相比是允许振动的第一模式、降低振动的第三模式、以及具有它们的中间性质的第二模式(参照图11的左侧)。
[0145]
动作模式的显示l71~l73包括参考显示r71~r73。参考显示r71~r73基于在步骤s203中关于初始参数630d中的标准参数630f而获取的超调量的值进行显示。
[0146]
参考显示r71~r73指示条件信息的候补。在本实施方式中,条件信息是优化处理的约束值。具体而言,约束值表示优化处理中的超调量的上限值。参考显示r72将在步骤s203中获取的超调量的值0.20mm示为约束值的候补。参考显示r71将在步骤s203中获取的超调量的值0.20mm的1.5倍的值示为约束值的候补。参考显示r73将在步骤s203中获取的超调量的值0.20mm的0.5倍的值示为约束值的候补。
[0147]
通过进行这样的处理,可以将基于使用标准参数630f获取到的超调量的值的现实的多个条件信息的候补作为参考显示r71~r73提示给用户。因此,用户可以在看到基于使用标准参数630f时的超调量os的值的参考显示r71~r73的基础上,在之后的步骤s209中输入可在优化处理中得到解的程度的现实的条件信息。因此,即使是参数集的设定经验不足
的用户,也能够调整机器人1~3的参数集。另外,在调整在新的环境下进行动作的机器人的参数时,也能够调整机器人1~3的参数集。进而,由于输入避开现实无法实现的范围的条件信息,因而能够高效地进行参数集的优化处理。
[0148]
需要指出,根据条件信息确定的约束值以外的指标的上限及下限预先确定,并存储于控制装置40的存储部44中。cpu610读出存储部44内的指标的上限及下限,并在步骤s220中的优化处理中加以利用。
[0149]
动作模式的显示l71所表示的第一模式与初始参数630d中的高速参数630e建立对应(参照图11的右侧以及图6中段的左侧)。动作模式的显示l73所表示的第三模式与初始参数630d中的高精度参数630g建立对应。动作模式的显示l72所表示的第二模式与初始参数630d中的标准参数630f建立对应。
[0150]
在图7的步骤s209中,cpu610接受与作为第二指标的超调量os相关的条件信息。具体而言,cpu610通过利用用户界面画面i207的按钮b71~b73接受从三个动作模式的显示l71~l73中所作的选择,从而接受条件信息。
[0151]
在选择了按钮b71的情况下,作为条件信息,输入动作模式的显示l71所表示的第一模式。在选择了按钮b72的情况下,作为条件信息,输入动作模式的显示l72所表示的第二模式。在选择了按钮b73的情况下,作为条件信息,输入动作模式的显示l73所表示的第三模式。所接受的条件信息被存储于ram630。在图6中,将存储于ram630的条件信息示为条件信息630b(参照图6上段的左侧)。在图6中,将接受条件信息的cpu610的功能部示为“条件接受部617”(参照图6下段的中央部)。
[0152]
通过进行这样的处理,用户通过从基于步骤s203中获取到的超调量的值的多个条件信息的候补中选择一个候补而能够输入条件信息。因此,即使是参数集的设定经验不足的用户,也能够输入关于超调量的现实的条件信息。
[0153]
另外,作为第一指标的动作时间ot和作为第二指标的超调量os具有在一方优异的情况下另一方逊色的趋势。因此,动作模式的显示l71~l73所示的、超调量不同的三个条件信息的候补中包括与使动作时间ot优先的条件信息对应的动作模式和与使超调量os优先的条件信息对应的动作模式(参照图11的l71、l73)。因此,用户能够通过所提示的多个动作模式的选择,一边反映自身的意向,一边容易地输入条件信息。
[0154]
在图7的步骤s210、s220中,按照输入的条件信息630b进行参数集的优化处理,决定新的参数集的值。
[0155]
在图7的步骤s210中,cpu610基于在步骤s209中接收到的条件信息630b,决定优化处理的搜索范围和在搜索中使用的参数集。具体而言,使用在步骤s209中接收到的条件信息630b所表示的约束值,决定优化处理的搜索范围。将与在步骤s209中接收到的条件信息630b建立对应的参数集决定为在搜索中使用的参数集。在图11的例子中,通过按钮b73选择了动作模式的显示l73。因此,将超调量0.10mm以下的范围决定为优化处理的搜索范围(参照图11下段的中央部)。另外,初始参数630d中的高精度参数630g被决定为在搜索中使用的作为初始解的参数集(参照图11下段的右侧)。
[0156]
在步骤s220中,使用步骤s210中确定的搜索范围和参数集进行优化处理,决定新的参数集的值。参数集的优化问题作为有约束的非线性优化问题被如下公式化。
[0157]
minimize:t(x)
[0158]
s.t.o(x)-oconst≤0
[0159]
其中,
[0160]
x是包括多个参数的参数集的矢量。
[0161]
t(x)是动作时间。
[0162]
o(x)是超调量。
[0163]
oconst是超调量的约束值。
[0164]
oconst表示在步骤s210中决定的优化处理的搜索范围。
[0165]
在此,使用罚函数法,如下定义用于优化的目标函数f(x),进行基于优化算法的优化。
[0166]
f(x)=t(x) λ
·
max(0,o(x)-oconst)2…
(eq4)
[0167]
这里,λ是常数。
[0168]
其结果,在满足步骤s210中决定的超调量的约束的基础上获得动作时间最小的参数集。
[0169]
在本实施方式中,在步骤s220中,通过cma-es(covariance matrix adaptation evolution strategy:协方差矩阵自适应进化策略)进行使目标函数f(x)最小的优化处理。
[0170]
在步骤s223中,cpu610确定平均矢量的初始值m(0)、步长的初始值σ(0)、协方差矩阵的初始值c(0)。平均矢量的初始值m(0)是在步骤s210中决定的参数集。步长的初始值σ(0)以及协方差矩阵的初始值c(0)是预先决定的。cpu610基于平均矢量的初始值m(0)以及协方差矩阵的初始值c(0),在平均矢量的初始值m(0)的周边决定多个参数集的候补xi。在图6中,将在步骤s210的处理之后实现最开始的步骤s223的处理的cpu610的功能部示为“初始条件决定部612d”(参照图6中段的中央部)。
[0171]
在步骤s225中,cpu610获取基于在步骤s210中决定的参数集使机器人3执行动作时的第一指标和第二指标的值。具体而言,cpu610关于多个参数集的候补xi分别求出目标函数f(xi)。首先,按照在步骤s223中决定的参数集的候补xi执行在步骤s200中决定的动作。然后,分别获取作为第一指标的动作时间t(xi)以及作为第二指标的超调量o(xi)。根据所获取的动作时间t(xi)以及超调量o(xi)计算目标函数f(xi)。在步骤s220中使机器人执行动作的cpu610的功能部是“动作执行部611”(参照图6上段的中央部)。在步骤s220中评价机器人的动作并获取第一指标以及第二指标的cpu610的功能部是“评价部613”(参照图11中段的中央部)。
[0172]
在步骤s227中,判定是否满足优化的结束条件。具体而言,判定是否执行了预定次数的步骤s223~s225的处理。在执行了预定次数的步骤s223~s225的处理的情况下,判定为满足优化的结束条件。
[0173]
在步骤s227中,在满足优化的结束条件的情况下,从多个参数集的候补xi中选择目标函数f(xi)的值最优异的参数集,并存储于ram630,处理进入s250。被选择的参数集成为与在步骤s210中决定的参数集相比作为第一指标的动作时间ot更优异的参数集。将包括所选择的参数集的参数作为参数630a示于图6(参照图6上段的左侧)。
[0174]
另一方面,在步骤s227中,在不满足优化的结束条件的情况下,增加处理的重复次数的计数,处理返回到s223。在继步骤s227之后执行的步骤s223中,cpu610基于在刚刚之前的步骤s225中获取的第一指标的值以及第二指标的值决定新的参数集。具体而言,基于在
刚刚之前的步骤s225中获取的多个参数集的候补xi的目标函数f(xi),决定演化路径,基于演化路径,决定新的平均矢量m(t 1)、步长σ(t 1)、协方差矩阵c(t 1)。然后,基于平均矢量m(t 1)以及协方差矩阵c(t 1),在平均矢量m(t 1)的周边决定多个参数集的候补xi。在图6中,将实现继步骤s227之后执行的步骤s223的处理的cpu610的功能部示为“新参数决定部612b”(参照图6上段的中央部)。
[0175]
反复执行步骤s223、s225的处理,直到满足步骤s227的条件为止。其结果,获取与在步骤s210中最开始决定的参数集相比关于作为第一指标的动作时间ot更优异的参数集。在图6中,将重复步骤s223、s225的处理并在步骤s227中决定目标函数f(xi)的值最优异的参数集的cpu610的功能部示为“参数获取部612c”(参照图6中段的中央部)。另外,在图6中,将包含指标决定部612a、新参数决定部612b、参数获取部612c、初始条件决定部612d的cpu610的功能部示为“参数搜索部612”(参照图6上段的中央部)。
[0176]
关于cma-es,最终获得的解的质量容易被平均矢量的初始值m(0)的质量所左右。但是,在本实施方式中,将平均矢量的初始值m(0)设为预先关于多个动作进行了优化处理的通用的参数集(参照图2的44p以及图6的630d)。因此,通过基于cma-es的优化处理,能够提高关于第一指标获得优异的参数集的可能性。
[0177]
图12是示出通过步骤s223、s225、s227的处理的反复而获得的参数集的动作时间ot的值以及超调量os的值的散布图。x表示超调量比在图7的步骤s210中确定的约束值大的参数集。黑色圆圈表示超调量比约束值小的参数集。白色圆圈是超调量比约束值小的参数集,示出动作时间ot最小的参数集。白色圆圈所表示的参数集是满足在步骤s209中接收到的约束值所规定的条件的解中使动作时间ot最小的最佳解(参照图6的630a)。
[0178]
在本实施方式中,用户可以在看到基于使用作为初始参数630d的标准参数630f时的超调量的值的参考显示r71~r73的基础上输入关于超调量的条件信息630b(图11)。因此,即使是参数集的设定经验不足的用户,也能够容易地调整机器人1~3的参数集。
[0179]
另外,在本实施方式中,基于所接收的条件信息,决定优化处理的搜索范围和参数集的初始解(参照图11的l73以及图7的s210)。因此,与随机地决定参数集的初始解的方式相比,能够以更短的时间获得符合用户意向的参数集。
[0180]
在图7的步骤s250中,cpu610关于存储于ram630的参数集、即是满足约束值所规定的条件的最佳解的参数集,在显示器602进行基于各自的第一指标的值以及第二指标的值的显示(参照图6的630a)。
[0181]
图13是示出在步骤s250中所示的用户界面画面i251的图。用户界面画面i251包括显示l91、l92和按钮b91、b92。显示l91是表示通过优化处理获得的参数集的动作时间ot的显示。显示l92是表示通过优化处理获得的参数集的超调量os的显示。按钮b91是用于采用通过优化处理获得的参数集的按钮。按钮b92是用于不采用通过优化处理获得的参数集而结束处理的按钮。
[0182]
在图7的步骤s260中,cpu610从用户接收是否采用通过优化处理获得的参数集的指示。在不采用通过优化处理获得的参数集而结束处理的情况下,用户按下按钮b92。在按下按钮b92的情况下,丢弃优化处理后的参数集,结束处理。
[0183]
在采用通过优化处理获得的参数集的情况下,用户按下按钮b91。在按下按钮b91的情况下,优化处理后的参数集从设定装置600发送至控制装置40,并存储于存储部44(参
照图2的44a)。通过该参数集的参数44a和机器人程序44b控制机器人3。
[0184]
也将本实施方式中作为参数集的调整的对象的动作称为“对象动作”。也将机器人程序44b以及机器人程序630c称为“轨迹信息”。显示器602也被称为“显示部”。也将存储于存储部44内的高速参数44p1、标准参数44p2和高精度参数44p3、以及存储于ram630的高速参数630e、高精度参数630g和标准参数630f称为“初始参数集”。将动作时间、超调量、振动量、噪音等级、推断寿命、转矩比例等指标也称为“评价指标”。
[0185]
也将本实施方式中的设定装置600称为“信息处理装置”。也将实现图7的步骤s203的功能的cpu610的评价部613称为“初始评价部”。也将在图7的步骤s225中获取使机器人3执行动作时的第一指标和第二指标的值的处理称为“评价处理”。也将在继步骤s227之后执行的步骤s223中基于在刚刚之前的步骤s225中获取到的第一指标的值以及第二指标的值决定新的参数集的处理称为“新参数决定处理”。
[0186]
b.实施方式二:
[0187]
在实施方式二中,图7的步骤s203、s207、s209、s210中的具体处理与实施方式一不同。实施方式二的其它方面与实施方式一是相同的。
[0188]
在实施方式二中,也是在图7的步骤s203中,响应调整参数集这一指示,获取使用初始参数630d使机器人3执行对象动作时的各种指标的值。不过,关于机器人程序630c和预先准备的三组初始参数集44p1~44p3,获取使用各个初始参数集44p1~44p3使机器人3执行动作时的各种指标的值。
[0189]
具体而言,在实施方式二中,使用初始参数630d的高速参数630e、标准参数630f以及高精度参数630g执行机器人3的动作。于是,在这些动作的执行期间,获取编码器e1~e6以及加速度传感器s1的输出,并获取动作时间、超调量等各种指标的值。
[0190]
在步骤s203中使机器人执行动作的cpu610的功能部是动作执行部611(参照图6上段的中央部)。获取关于机器人的动作的各种指标的值的cpu610的功能部是评价部613(参照图6中段的中央部)。
[0191]
在图7的步骤s207中,cpu610将基于关于三组初始参数集44p1~44p3而获取的动作时间ot的值和超调量os的值的参考显示r74a~r76a、r74b~r76b显示于显示器602。
[0192]
图14是示出在实施方式二的步骤s207中显示于设定装置600的显示器602的用户界面画面i207b的图。用户界面画面i207b是用于接受条件信息的用户界面画面。用户界面画面i207b包括动作模式的显示l74~l76和按钮b74~b76。
[0193]
按钮b74~b76是用于选择由显示l74~l76所表示的动作模式的按钮。按钮b74~b76构成为只能选择按钮b74~b76中的一个。
[0194]
动作模式的显示l74~l76表示三个动作模式。具体而言,显示l74~l76所表示的三个动作模式是允许振动的高速模式、降低振动的高精度模式、以及具有它们的中间性质的普通模式(参照图14的左侧)。
[0195]
动作模式的显示l74所表示的高速模式与高速参数630e相对应。动作模式的显示l76所表示的高精度模式与高精度参数630g相对应。动作模式的显示l75所表示的普通模式与标准参数630f相对应。
[0196]
动作模式的显示l71~l73包括参考显示r74a~r76a、r74b~r76b。参考显示r74a、74b分别是基于步骤s203中关于初始参数630d中的高速参数630e而获取的动作时间和超调
量的值的显示。参考显示r75a、75b分别是基于步骤s203中关于初始参数630d中的标准参数630f而获取的动作时间和超调量的值的显示。参考显示r76a、76b分别是基于步骤s203中关于初始参数630d中的高精度参数630g而获取的动作时间和超调量的值的显示。即,参考显示r74a~r76a、r74b~r76b显示使用各个初始参数集时的第一指标和第二指标的值。
[0197]
通过进行这样的显示,用户可以在看到参考显示r74a~r76a、r74b~r76b的基础上输入关于动作时间和超调量的条件信息(参照图14的b74~b76),其中,参考显示r74a~r76a、r74b~r76b基于多个初始参数集44p1~44p3的作为第一指标的动作时间的值和作为第二指标的超调量的值。因此,即使是参数集的设定经验不足的用户,也可以反映自己对第一指标和第二指标的期望而调整机器人1~3的参数集。
[0198]
另外,参考显示r74a~r76a、r74b~r76b是关于在步骤s203中被用于执行动作的所有初始参数集44p1~44p3的参考显示。因此,用户可以在看到参考显示r74a~r76a、r74b~r76b的基础上,从广泛的选项中输入关于动作时间和超调量的条件信息630b,其中,参考显示r74a~r76a、r74b~r76b基于所有初始参数集44p1~44p3的动作时间ot的值和超调量os的值。因此,反映对动作时间和超调量的期望时的自由度高。
[0199]
在图7的步骤s209中,cpu610接受条件信息。具体而言,cpu610通过接受利用用户界面画面i207b的按钮b74~b76从三个动作模式的显示l74~l76中所作的选择来接受条件信息。
[0200]
当选择了按钮b74时,作为条件信息,输入动作模式的显示l74所表示的高速模式。当选择了按钮b75时,作为条件信息,输入动作模式的显示l75所表示的普通模式。当选择了按钮b76时,作为条件信息,输入动作模式的显示l76所表示的高精度模式。
[0201]
在图7的步骤s210中,cpu610基于步骤s209中接收到的条件信息630b,决定优化处理的搜索范围和搜索中使用的参数集。具体而言,使用步骤s209中接收到的条件信息630b所对应的第二指标的约束值,决定优化处理的搜索范围。将获取步骤s209中接收到的条件信息630b所表示的动作模式的动作时间和超调量时使用的参数集决定为搜索中使用的参数集(参照图7的s203)。在图14的例子中,通过按钮b74选择了动作模式的显示l74。因此,将超调量0.4mm以下的范围决定为优化处理的搜索范围(参照图14上段的右侧)。另外,将初始参数630d中的高速参数630e决定为作为搜索中使用的初始解的参数集(参照图14上段的左侧)。
[0202]
在这样的方式中,即使是参数集的设定经验不足的用户,也可以输入动作时间和超调量的现实且良好的值作为关于动作时间和超调量的条件信息630b。
[0203]
c.实施方式三:
[0204]
实施方式三中,图7的步骤s207、s209、s210中的具体处理与实施方式二不同。实施方式三的其它方面与实施方式二是相同的。
[0205]
图15是示出在实施方式三的步骤s207中显示于设定装置600的显示器602的用户界面画面i207c的图。用户界面画面i207c是用于接受条件信息的用户界面画面。用户界面画面i207c包括参考显示r77、r78、输入窗d71、d72以及按钮b77、b78、b81、b82。
[0206]
按钮b77、b78是用于从作为第一指标的动作时间和作为第二指标的超调量中选择规定条件信息的指标的按钮。用户在希望以动作时间指定作为条件信息的搜索的约束值时,选择按钮b77。当选择了按钮b77时,输入窗d72变灰,无法输入值。用户在希望以超调量
指定搜索的约束值时,选择按钮b78。当选择了按钮b78时,输入窗d71变灰,无法输入值。
[0207]
参考显示r77是基于步骤s203中关于初始参数630d中的高速参数630e而获取的动作时间的值的显示。参考显示r78是基于步骤s203中关于初始参数630d中的高精度参数630g而获取的超调量的值的显示。即,在实施方式三中,步骤s207中的参考显示r77、r78是仅基于步骤s203中关于利用三组初始参数集的动作而获取的动作时间和超调量中的动作时间的最佳值和超调量的最佳值的显示。
[0208]
输入窗d71是用于接受作为第一指标的动作时间的上限作为条件信息的接口。用户在希望以动作时间指定优化的搜索的约束值时,选择按钮b77,参考参考显示r77所示的动作时间的值,将希望作为动作时间的上限的数值输入到输入窗d71中。
[0209]
输入窗d72是用于接受作为第二指标的超调量的上限作为条件信息的接口。用户在希望以超调量指定优化的搜索的约束值时,选择按钮b78,参考参考显示r78所示的超调量的值,将希望作为超调量的上限的数值输入到输入窗d72中。
[0210]
通过进行这样的显示,用户可以在看到参考显示r77、r78的基础上输入关于动作时间或超调量的现实的条件信息630b(参照图15),其中,参考显示r77、r78基于使用初始参数集44p1~44p3时的动作时间和超调量的最佳值。因此,即使是参数集的设定经验不足的用户,也可以输入动作时间和超调量的现实且良好的值作为关于动作时间和超调量的条件信息630b。另外,由于不进行基于动作时间和超调量的值中最佳值以外的值的参考显示,因此,与关于所有指标进行参考显示的方式相比,用户容易掌握显示器602中的参考显示。
[0211]
按钮b81是用于确认输入到输入窗d71或输入窗d72的指标的值的按钮。按钮b82是用于放弃输入到输入窗d71或输入窗d72的指标的值而重新向输入窗d71或输入窗d72输入值的按钮。
[0212]
在图7的步骤s209中,cpu610接受通过用户界面画面i207c的按钮b77、b78所选择的指标以及输入到输入窗d71或输入窗d72的指标的值作为条件信息。
[0213]
在图7的步骤s210中,cpu610基于步骤s209中接收到的条件信息630b决定优化处理的搜索范围。具体而言,使用步骤s209中接收到的条件信息630b所表示的指标及其值来决定优化处理的搜索范围。在图15的例子中,选择按钮b77,向输入窗d71中输入1.2秒。因此,将动作时间1.2秒以下的范围决定为优化处理的搜索范围。另外,在实施方式三中,与用户界面画面i207c中的输入无关,将初始参数630d中的标准参数630f决定为作为搜索中使用的初始解的参数集(参照图6上段的左侧)。
[0214]
在这样的方式中,即使是参数集的设定经验不足的用户,也可以输入动作时间和超调量的现实且良好的值作为关于动作时间和超调量的条件信息630b。
[0215]
另外,在本实施方式中,基于反映了用户意向的约束值的具体值决定优化处理的搜索范围(参照图15的d71、d72)。因此,与预先准备选项并通过选项的选择来输入条件信息630b的方式相比,能够得到符合用户意向的参数集的可能性高。
[0216]
d.实施方式四:
[0217]
实施方式四中,图7的步骤s207、s209、s210中的具体处理与实施方式一不同。实施方式四的其它方面与实施方式一是相同的。
[0218]
图16是示出在实施方式四的步骤s207中显示于设定装置600的显示器602的用户界面画面i207d的图。用户界面画面i207d包括参考显示r79、输入窗d73以及按钮b51、b52。
[0219]
参考显示r79是表示在步骤s203中关于初始参数630d中的标准参数630f所获取的动作时间的值以及超调量的值的显示。具体而言,参考显示r79示出了在步骤s203中所获取的动作时间的值1.4秒和超调量的值0.2mm。
[0220]
输入窗d73是用于接受作为第二指标的超调量的上限作为条件信息的接口。用户将参考显示r79中所示的动作时间的值以及超调量的值作为参考,来将作为超调量的上限所期望的数值经由键盘604以及鼠标605输入到输入窗d73。
[0221]
作为第一指标的动作时间ot和作为第二指标的超调量os具有在一方优异的情况下另一方逊色的趋势。因此,用户通过将参考显示r79中所示的动作时间的值以及超调量的值作为参考来决定超调量的上限,能够一边反映自身的意向,一边容易地输入条件信息。例如,若感觉到参考显示r79中所示的动作时间的值1.4秒足够短、而超调量的值0.20mm较大,则用户能够输入比作为参考显示r79所示的值小的值、例如0.15mm来作为超调量的上限。若感到参考显示r79中所示的动作时间的值1.4秒较长、而超调量的值0.20mm足够小,则用户能够输入比作为参考显示r79所示的值大的值、例如0.25mm来作为超调量的上限。
[0222]
按钮b51是用于确认输入到输入窗d73的数值的按钮。按钮b52是用于放弃输入到输入窗d73的指标的值而重新向输入窗d73输入值的按钮。
[0223]
在图7的步骤s209中,cpu610接受与作为第二指标的超调量os相关的条件信息。具体而言,通过在用户界面画面i207d中向输入窗d73输入约束值并按下按钮b51,从而cpu610接受输入到输入窗d73的约束值作为条件信息。
[0224]
在图7的步骤s210中,cpu610基于在步骤s209中接收到的条件信息630b,决定优化处理的搜索范围和在搜索中使用的参数集。具体而言,使用在步骤s209中经由输入窗d73接收到的超调量的上限值,决定优化处理的搜索范围。另外,在实施方式四中,与用户界面画面i207d中的输入无关,将随机确定的参数集决定为作为在搜索中使用的初始解的参数集。
[0225]
在本实施方式中,也是基于所接受的条件信息决定优化处理的搜索范围(参照图16)。因此,与优化处理的搜索范围未反映用户意向的方式相比,能够在更短的时间内得到符合用户意向的参数集。
[0226]
e.实施方式五:
[0227]
实施方式五中,图7的步骤s207、s209、s210中的具体处理与实施方式四不同。实施方式五的其它方面与实施方式四是相同的。
[0228]
图17是示出在实施方式五的步骤s207中显示于设定装置600的显示器602的用户界面画面i207e的图。用户界面画面i207e包括参考显示r79、输入窗d74以及按钮b51、b52。
[0229]
参考显示r79与图16所示的实施方式四的参考显示r79是相同的。按钮b51、b52与图16所示的实施方式四的按钮b51、b52是相同的。
[0230]
输入窗d74是用于接受作为第一指标的动作时间的上限作为条件信息的界面。用户参考参考显示r79所示的动作时间的值和超调量的值,经由键盘604和鼠标605在输入窗d74中输入希望作为动作时间的上限的数值。
[0231]
例如,如果感觉参考显示r79所示的动作时间的值1.4秒足够短、而超调量的值0.20mm较大,则用户可以输入比参考显示r79所示的值大的值、例如1.6秒作为动作时间的上限。如果感觉参考显示r79所示的动作时间的值1.4秒较长、而超调量的值0.20mm足够小,则用户可以输入比作为参考显示r79所示的值小的值、例如1.2秒作为动作时间的上限。
[0232]
在图7的步骤s209中,cpu610接受与作为第一指标的动作时间相关的条件信息。具体而言,在用户界面画面i207e中,通过向输入窗d74输入约束值并按下按钮b51,从而cpu610接受输入到输入窗d74的约束值作为条件信息。
[0233]
在图7的步骤s210中,cpu610基于步骤s209中接收到的条件信息630b,决定优化处理的搜索范围和搜索中使用的参数集。具体而言,使用步骤s209中经由输入窗d74接收到的动作时间的上限值,决定优化处理的搜索范围。另外,与用户界面画面i207e中的输入无关,将随机确定的参数集决定为作为搜索中使用的初始解的参数集。
[0234]
在本实施方式中,也是基于所接受的条件信息决定优化处理的搜索范围(参照图17)。因此,与优化处理的搜索范围未反映用户意向的方式相比,能够在更短的时间内得到符合用户意向的参数集。
[0235]
f.实施方式六:
[0236]
实施方式六中,图7的步骤s207、s209中的具体处理与实施方式一不同。实施方式六的其它方面与实施方式一是相同的。
[0237]
图18是示出在实施方式六的步骤s207中显示于设定装置600的显示器602的用户界面画面i207f的图。用户界面画面i207f包括参考显示r79、动作模式的显示l81~l83、按钮b81~b83。
[0238]
参考显示r79与图16所示的实施方式四的参考显示r79是相同的。
[0239]
按钮b81~b83是用于选择由显示l81~l83所表示的动作模式的按钮。按钮b81~b83构成为只能选择按钮b81~b83中的一个按钮。
[0240]
动作模式的显示l81~l83表示三个动作模式。显示l81~l83所表示的动作模式是关于作为第二指标的超调量而程度不同的三个条件信息的候补所对应的动作模式。具体而言,显示l71~l73所表示的三个动作模式是与初始参数630d中的标准参数630f相比允许振动的第一模式、进一步降低振动的第三模式、以及具有同程度的超调量的第二模式。
[0241]
动作模式的显示l81~l83包括参考显示r81~r83。参考显示r81~r83是基于步骤s203中关于初始参数630d中的标准参数630f而获取的超调量的值的显示。
[0242]
参考显示r81~r83指示条件信息的候补。参考显示r82将步骤s203中获取到的超调量的值0.20mm示为约束值的候补。参考显示r81将步骤s203中获取到的超调量的值0.20mm的1.5倍的值示为约束值的候补。参考显示r83将步骤s203中获取到的超调量的值0.20mm的0.5倍的值示为约束值的候补。
[0243]
通过进行这样的处理,可以将基于使用标准参数630f而获取的超调量的值的现实的多个条件信息的候补作为参考显示r79、r81~r83提示给用户。因此,用户可以在看到基于使用标准参数630f时的超调量os的值的参考显示r79、r81~r83的基础上进行现实的条件信息的输入。因此,即使是参数集的设定经验不足的用户,也能够调整机器人1~3的参数集。
[0244]
动作模式的显示l81所表示的第一模式与初始参数630d中的高速参数630e相对应(参照图6中段的左侧)。动作模式的显示l83所表示的第三模式与初始参数630d中的高精度参数630g相对应。动作模式的显示l82所表示的第二模式与初始参数630d中的标准参数630f相对应。
[0245]
在图7的步骤s209中,cpu610接受与作为第二指标的超调量os相关的条件信息。具
体而言,cpu610通过接受利用用户界面画面i207f的按钮b81~b83从三个动作模式的显示l81~l83中所作的选择来接受条件信息。
[0246]
当选择了按钮b81时,作为条件信息,输入动作模式的显示l81所表示的第一模式。当选择了按钮b82时,作为条件信息,输入动作模式的显示l82所表示的第二模式。当选择了按钮b83时,作为条件信息,输入动作模式的显示l83所表示的第三模式。所接受的条件信息存储在ram630中。
[0247]
通过进行这样的处理,用户通过从基于步骤s203中获取到的超调量的值的多个条件信息的候补中选择一个候补而能输入条件信息。因此,即使是参数集的设定经验不足的用户,也能够输入关于超调量的条件信息。
[0248]
g.其它实施方式:
[0249]
g1.其它的实施方式一:
[0250]
(1)在上述实施方式中,被优化的动作参数44c中包括表示限制最大加速度a0、上限最大加速度a1、基准目标加速度ast的倾斜度b、负荷校正系数cl的倾斜度d、伺服增益的参数(参照图4和图5)。但是,被优化的动作参数44c可以包括这些动作参数44c以外的动作参数44c、例如表示动作的中继点的参数。
[0251]
(2)在上述实施方式中,以利用机器人3的夹具23拾取对象物w的处理为例对动作参数44c的优化进行了说明(参照图1以及图3)。但是,将参数优化的处理并不局限于拾取处理中的动作参数44c,也能够应用于其它各种处理。
[0252]
例如,参数的优化处理可以设为配置拍摄部21的处理、配置照明部22的处理。即,也可以将光学参数44d作为优化处理的对象(参照图3的上段)。另外,在机器人1~3具备力觉传感器的情况下,参数的优化处理可以设为包括力控制的处理。即,也可以将力控制参数44e作为优化处理的对象(参照图3的上段)。参数的优化处理例如也可以适用于螺钉紧固、插入、利用钻头进行开孔、去毛刺、研磨、组装、产品检查等。
[0253]
(3)在上述实施方式中,准备了三组初始参数集(图2的44p1~44p3)。但是,预先准备的参数集的数量也可以是一组、两组、四组以上等其它数量。
[0254]
(4)在上述实施方式中,初始参数44p通过利用计算机进行的优化处理来确定(参照图2下段的左侧)。但是,初始参数也可以由对于机器人的参数设定具有充分经验的人来进行。另外,也可以对人设定的初始参数之后通过计算机进行的优化处理来进行调整。进而,也可以对通过计算机进行的优化处理所设定的初始参数之后由人来调整。
[0255]
(5)在上述实施方式中,图7的步骤s203中,获取使用初始参数630d使机器人3执行对象动作时的各种指标的值。此时的执行次数可以是一次,也可以是多次。在执行次数为多次的情况下,在步骤s203中获取的指标可设为实际获得的指标的值的平均值、最佳值、最差值等。
[0256]
(6)在上述实施方式中,在图7的步骤s203、225中,实际使用参数集使机器人3动作来测量第一指标以及第二指标的值。但是,也可以使用能够再现机器人的残余振动的模拟器进行模拟,来进行基于参数集的控制的评价。
[0257]
(7)在上述实施方式一中,参考显示将对获取到的指标的值乘以规定系数而得到的值示为约束值的候补(参照图11的r71~r73)。但是,约束值的候补也可以是通过其它方法确定的值,如对获取到的指标的值加上或减去规定量而得到的值等。
[0258]
(8)在上述实施方式一中,参考显示r71~r73是基于在步骤s203中关于初始参数630d中的标准参数630f所获取的第二指标即超调量的值的显示。但是,参考显示也可以设为基于关于初始参数而获取的第一指标的值的显示。另外,如上述实施方式二所示,也可以设为基于关于初始参数而获取的第一指标的值和第二指标的值两者的显示(参照图14的r74a~r76a、r74b~r76b、图15的r77、r78、图16~图18的r79)。
[0259]
(9)在上述实施方式一中,显示l71~l73所表示的动作模式是关于作为第二指标的超调量而程度不同的三个条件信息的候补所对应的动作模式(参照图11的r71~r73)。但是,显示所对应的动作模式也可以是关于作为第一指标的动作时间而程度不同的多个条件信息的候补所对应的动作模式。另外,显示所对应的动作模式也可以是关于第一指标和第二指标两者而程度不同的多个条件信息的候补所对应的动作模式(参照图14的r74a~r76a、r74b~r76b)。进而,显示所对应的动作模式也可以包括关于第一指标和第二指标中的一方而程度不同、但关于另一方则相等的多个条件信息的候补所对应的动作模式。
[0260]
(10)上述实施方式中,在上述实施方式一的步骤s207中,通过显示l71~l73示出三个动作模式(参照图11)。但是,图7的步骤s207中所示的动作模式的数量也可以是一个、两个、四个以上等其它数量。
[0261]
(11)在上述实施方式一、二、六中,条件信息是表示从三个动作模式中选择的一个动作模式的信息(参照图7的s209以及图11的b73和图14的b74、图18的b81)。在上述实施方式三~五中,条件信息是输入到输入窗d73~d74中的作为指标的上限的约束值(参照图7的s209以及图15的d71、d72、图16的d73和图17的d74)。但是,条件信息例如是用户关于第一指标及/或第二指标所考虑的理想的值等确定用于控制对象动作的参数集的优化处理的条件的与第一指标和第二指标中的至少一方相关的信息即可。不过,条件信息是与被设为优化处理的目的的指标以外的指标相关的信息为好。
[0262]
(12)在上述实施方式中,式(eq4)中的λ是常数。但是,λ也可以设定为在优化处理中的反复中逐渐增大。根据这样的方式,能够更稳定地获得解。
[0263]
(13)在上述实施方式的步骤s220中,通过cma-es进行优化处理(参照图7)。但是,优化处理也可以通过其它方法进行。
[0264]
例如,也可以使用贝叶斯优化算法进行优化处理。贝叶斯优化是假定根据m维的输入x提供输出y的黑箱函数遵循高斯过程(gaussian process:gp)来搜索使输出y最大化的输入x的方法。通过假定黑箱函数遵循高斯过程而进行处理,与假定目标函数的观测值遵循其它分布的方式相比,能够通过简单的处理进行高度适合于各种目标函数的优化。
[0265]
例如,在通过nelder-mead法进行优化处理的情况下,能够进行如下的处理。在进行优化的参数集的参数为n个时,nelder-mead法如下应用于参数集的优化处理。首先,在n维空间中,选择由分别与参数集对应的n 1个点规定的多面体。此时,将与图7的步骤s210中决定的参数集、例如高精度参数630g对应的点设为多面体的重心。换言之,基于高精度参数630g,以使高精度参数630g成为重心的方式决定n 1个参数集。使n 1个点中目标函数f(x)的值最佳的点在保存单体的体积的状态下向由其它n个点所确定的超平面的相反侧移动。基于包括新的点在内的n 2个点各自的目标函数的值,重新新地决定n 1个点。新加的点的位置基于刚刚之前的n 2个点各自的目标函数的值确定。通过反复进行这样的处理,最终,多面体朝向最优解移动且缩小。
[0266]
如果采用这样的方式,即便是参数集的设定经验不足的用户,也能够根据基于使用初始参数集44p1~44p3时的指标的值的参考显示r71~r73,调整机器人的参数集(参照图11)。
[0267]
(14)在上述实施方式中,在关于超调量o(x)的约束之下进行求出使t(x)最小的参数集的单目标优化(参照上述(eq4)以及图7的s220)。但是,例如,也可以进行以动作时间、超调量、振动量、噪音等级、推断寿命、转矩比例中的两个以上为优化的目标的多目标优化来决定参数集。
[0268]
在这样的情况下,优选基于所输入的条件信息确定搜索范围。例如,确定搜索范围的指标的上限和下限中的至少一方可以设为对获取到的指标的值乘以规定系数而得到的值。确定搜索范围的指标的上限和下限中的至少一方可以设为对获取到的指标的值加上或减去规定量而得到的值。
[0269]
(15)在上述实施方式中,图7的步骤s220内的反复处理的结束条件是执行了预定次数的步骤s223~s225的处理。但是,优化的反复处理的结束条件也可以是其它条件,例如,也可以设为得到了具有比预定的阈值优异的目标函数的值的一个以上的解。
[0270]
(16)在上述实施方式一中,在图7的步骤s250中,示出了通过优化处理获得的一组参数集的动作时间ot以及超调量os(参照图13)。但是,也可以采用如下方式:关于在优化处理的过程中获得的多个参数集,提示第一指标以及第二指标中的一者或者两者,使用户从多个参数集中选择一个参数集(参照图12的黑圈以及白圈)。
[0271]
(17)在上述实施方式中,被优化的参数是用于控制垂直多关节型机器人的动作的参数(参照图1以及图3)。但是,被优化的参数也可以设为用于控制水平多关节机器人、直行机器人等其它机器人的动作的参数。例如,被优化的参数也可以设为用于控制包括七个以上的工作轴的机器人的动作、双臂机器人等多臂机器人的动作的参数。一般而言,包括七个以上的工作轴的机器人、多臂机器人与其它机器人相比负载较大。因此,在对用于控制这样的机器人的动作的参数进行优化的情况下,在目标函数中包含“机器人进行动作时所需的驱动力”为好。
[0272]
g2.其它的实施方式二:
[0273]
在上述实施方式二的图7的步骤s203中,获取使用初始参数集44p1~44p3使机器人3执行动作时的各种指标的值。然后,在图7的步骤s207中,将基于关于三组初始参数集44p1~44p3而获取的动作时间ot的值和超调量os的值的参考显示r74a~r76a、r74b~r76b显示于显示器602(参照图14)。
[0274]
但是,也可以仅使用预先准备的多个初始参数集的一部分使机器人3执行动作而获取各种指标的值。进而,也可以像实施方式一那样,仅使用预先准备的多个初始参数集中的一组使机器人3执行动作而获取各种指标的值。
[0275]
g3.其它的实施方式三:
[0276]
在上述实施方式二的图7的步骤s207中,cpu610将基于关于三组初始参数集44p1~44p3而获取的动作时间ot的值和超调量os的值的参考显示r74a~r76a、r74b~r76b显示于显示器602。但是,参考显示也可以预先准备,仅显示步骤s203中执行动作所使用的多个初始参数集的一部分。
[0277]
g4.其它实施方式四:
[0278]
在实施方式三中,步骤s207中的参考显示r77、r78是仅基于关于在步骤s203中以三组初始参数集进行动作而获取的动作时间和超调量中的动作时间的最佳值和超调量的最佳值的显示(参照图15)。但是,参考显示也可以包括关于各指标的最佳值以外的显示。例如,参考显示也可以包括通过动作的执行或模拟而获取的各指标的多个值中关于各指标的最佳值的显示和最差值的显示。
[0279]
g5.其它实施方式五:
[0280]
在实施方式一中,动作模式的显示l71~l73表示三个动作模式。显示l71~l73所表示的动作模式是关于作为第二指标的超调量而程度不同的三个条件信息的候补所对应的动作模式(图11)。但是,将基于关于初始参数集而获取的指标的值的参考显示显示于显示部的工序也可以如实施方式三~实施方式五的参考显示r77~r79那样为并非条件信息的候补的信息的显示(参照图15~图17)。
[0281]
g6.其它的实施方式六:
[0282]
在上述实施方式一的图7的步骤s209中,cpu610通过接受利用用户界面画面i207的按钮b71~b73从三个动作模式的显示l71~l73中所作的选择来接受条件信息。但是,条件信息的接受也可以如实施方式三~实施方式五中经由输入窗d71~d74进行输入那样为数值的输入,而非动作模式的选择。
[0283]
g7.其它的实施方式七:
[0284]
在上述实施方式一的步骤s210中,cpu610基于步骤s209中接收到的条件信息630b决定优化处理的搜索范围和搜索中使用的参数集。但是,作为搜索中使用的初始解的参数集也可以不基于所输入的条件信息确定。例如,作为搜索中使用的初始解的参数集也可以如实施方式三那样预先确定。另外,作为搜索中使用的初始解的参数集也可以如实施方式四那样随机确定。
[0285]
例如,在使用贝叶斯优化算法作为优化方法的情况下,解的质量不受初始解的影响。因此,作为搜索中使用的初始解的参数集也可以随机确定。另一方面,在使用如cma-es、nelder-mead法那样解的质量受初始解影响的方法进行优化处理的情况下,优选使用预先关于多个动作进行了优化处理的初始参数集、由具有参数集的设定经验的人确定的初始参数集作为初始解。
[0286]
h.再其它的实施方式:
[0287]
本公开并不局限于上述实施方式,在不脱离其主旨的范围内能够以各种方式实现。例如,本公开也可以通过以下方式来实现。为了解决本公开的技术问题的一部分或者全部、或者为了达到本公开的效果的一部分或者全部,与以下记载的各方式中的技术特征相对应的上述实施方式中的技术特征可适当地进行替换、组合。另外,该技术特征只要在本说明书中不是作为必须的特征进行了说明,就能够适当删除。
[0288]
(1)根据本公开的一方式,提供一种支持机器人的参数集的调整的方法。该方法具备:工序(a),接收规定所述机器人的对象动作的轨迹的轨迹信息;工序(b),响应调整用于控制所述对象动作的参数集的指示,关于预先准备的一个以上的初始参数集,获取使用各个初始参数集使所述机器人执行所述对象动作时的控制结果的评价指标的值;工序(c),将基于关于所述一个以上的初始参数集而获取的所述评价指标的值的一个以上的参考显示显示于显示部;以及工序(d),接收确定所述参数集的优化处理的条件的关于所述评价指标
的条件信息的输入,并按照所述条件信息进行所述参数集的优化处理,决定新的参数集的值。
[0289]
根据这样的方式,用户可以在看到基于使用初始参数集时的评价指标的值的参考显示的基础上输入可在优化处理中得到解的程度的条件信息。因此,即使是参数集的设定经验不足的用户,也可以调整机器人的参数集。
[0290]
(2)在上述方法中,也可以采用如下方式:所述工序(b)是关于预先准备的两个以上的初始参数集获取使用各个初始参数集使所述机器人执行所述对象动作时的所述评价指标的值的工序,所述工序(c)是将基于关于所述两个以上的初始参数集而获取的所述评价指标的值的两个以上的所述参考显示显示于所述显示部的工序。
[0291]
根据这样的方式,用户可以在看到基于多个初始参数集的评价指标的值的参考显示的基础上输入关于评价指标的条件信息。因此,即使是参数集的设定经验不足的用户,也可以反映关于评价指标的期望来调整机器人的参数集。
[0292]
(3)在上述方法中,也可以采用如下方式:所述两个以上的所述参考显示是关于在所述工序(b)中被用于执行所述对象动作的所有所述初始参数集的参考显示。
[0293]
根据这样的方式,用户可以在看到基于所有初始参数集的评价指标的值的参考显示的基础上输入关于评价指标的条件信息。
[0294]
因此,反映关于评价指标的期望时的自由度高。
[0295]
(4)在上述方法中,也可以采用如下方式:所述工序(c)中的所述参考显示是仅基于所述工序(b)中所获取的所述评价指标的值中的最佳值的显示。
[0296]
根据这样的方式,用户可以在看到基于使用初始参数集时的评价指标的最佳值的参考显示的基础上输入关于该评价指标的条件信息。因此,即使是参数集的设定经验不足的用户,也可以输入评价指标的现实且良好的值作为关于评价指标的条件信息。另外,由于不进行基于评价指标的值中最佳值以外的值的参考显示,因而用户容易掌握显示部中的参考显示。
[0297]
(5)在上述方法中,也可以采用如下方式:所述工序(c)包括将与所述条件信息的两个以上的候补相关的两个以上的动作模式的显示显示于所述显示部的工序,其中,该两个以上的候补是所述评价指标的程度不同的候补。
[0298]
根据这样的方式,能够向用户提示基于所获取的评价指标的值的现实的多个条件信息的候补。
[0299]
(6)在上述方法中,也可以采用如下方式:所述工序(d)包括通过接受从所述两个以上的动作模式的显示中所作的选择而接受所述条件信息的工序。
[0300]
根据这样的方式,用户通过从基于所获取的评价指标的值的多个条件信息中选择一个而能输入条件信息。因此,即使是参数集的设定经验不足的用户,也可以输入关于评价指标的条件信息。
[0301]
(7)在上述方法中,也可以采用如下方式:所述工序(d)包括以下工序:基于所述条件信息,决定优化处理的搜索范围和所述优化处理中使用的所述参数集;以及使用所述搜索范围和所述优化处理中使用的所述参数集进行所述参数集的优化处理,决定新的参数集的值。
[0302]
在这样的方式中,基于接收到的条件信息,决定优化处理的搜索范围和参数集的
初始解。因此,与随机决定参数集的初始解的方式相比,能够在更短时间内得到符合用户意向的参数集。
[0303]
(8)根据本公开的另一方式,提供一种用于使计算机支持机器人的参数集的调整的程序。该程序使所述计算机实现如下功能:(a),接收规定所述机器人的对象动作的轨迹的轨迹信息;(b),响应调整用于控制所述对象动作的参数集的指示,关于预先准备的一个以上的初始参数集,获取使用各个初始参数集使所述机器人执行所述对象动作时的控制结果的评价指标的值;(c),将基于关于所述一个以上的初始参数集而获取的所述评价指标的值的一个以上的参考显示显示于显示部;以及(d),接收确定所述参数集的优化处理的条件的关于所述评价指标的条件信息的输入,并按照所述条件信息进行所述参数集的优化处理,决定新的参数集的值。
[0304]
(9)根据本公开的另一方式,提供一种支持机器人的参数集的调整的信息处理装置。该信息处理装置具备:(a)轨迹接受部,接收规定所述机器人的对象动作的轨迹的轨迹信息;(b)初始评价部,响应调整用于控制所述对象动作的参数集的指示,关于预先准备的一个以上的初始参数集,获取使用各个初始参数集使所述机器人执行所述对象动作时的控制结果的评价指标的值;(c)显示控制部,将基于关于所述一个以上的初始参数集而获取的所述评价指标的值的一个以上的参考显示显示于显示部;以及(d)参数搜索部,接收确定所述参数集的优化处理的条件的关于所述评价指标的条件信息的输入,并按照所述条件信息进行所述参数集的优化处理,决定新的参数集的值。
[0305]
本公开也可以通过上述以外的各种方式来实现。例如,可通过机器人系统的控制装置、用于实现该控制装置的功能的计算机程序、记录有该计算机程序的非暂时性的记录介质等方式来实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。