1.本发明涉及一种训练用装置,尤其涉及一种拳击对打训练用装置,属于运动器材领域。
背景技术:
2.随着社会经济的不断提高,人们生活水平也不断提高,现在年轻人族除了上班就是娱乐生活,现娱乐生活有很多种类,其中锻炼身体的娱乐方式越来越不受年轻人的欢迎,现在锻炼身体的方式一般为跑步以及使用健身器材进行锻炼,现在的健身器材多种多样,但是缺少趣味性。
3.cn201821468029.2公开了一种交互式拳击训练靶,人形拳击靶本体及设置在所述人形拳击靶本体上的拳击感应电路,其中,所述拳击感应电路包括:控制器及分别与所述控制器相连的压力传感器、指示灯、语音模块、显示模块;其中,所述压力传感器和指示灯布设在所述人形拳击靶本体上,所述压力传感器用于检测人形拳击靶本体所接受到的拳击信号,并发送给控制器;所述控制器用于控制所述指示灯的显示状态,以指引训练者下一次出拳击打的位置,同时根据所述压力传感器检测的拳击信号,控制所述语音模块进行语音播报,控制所述显示模块进行拳击结果显示。
4.使用该交互式拳击训练靶时,使用者使用拳头捶打人形拳击靶本体,然后压力传感器能够检测到人形拳击靶本体所接受到的拳击信号,通过语音模块、显示模块和指示灯,向使用者反馈训练结果,如此能够提示使用者出拳的位置,但是在使用过程中,没有产生肢体上的交互,这样使用者不能得到对打的体验感,现急需研发一种能够模拟人体进行对打,交互性更好以及趣味性更高的拳击对打训练用装置。
技术实现要素:
5.发明目的:本发明的目的是提供一种能够模拟人体进行对打,交互性更好以及趣味性更高的拳击对打训练用装置,以克服使用交互式拳击训练靶时,使用者不能得到对打的体验感,交互性差的缺点。
6.技术方案:本发明所述一种拳击对打训练用装置,包括有安装盘、转动柱、弹性套、固定柱、双轴电机、摆动架、摆动臂、第一压力传感器、摆动机构、头部模拟机构和停止机构;所述安装盘顶部中间设有固定柱,所述固定柱下部转动式连接有转动柱,所述固定柱外侧设有弹性套,所述弹性套套在转动柱外侧,所述固定柱后部左右两侧均设有双轴电机,所述双轴电机的输出轴上均设有摆动架,所述摆动架上均转动式连接有摆动臂,所述转动柱下部左右两侧均设有第一压力传感器,所述安装盘底部设有摆动机构,所述固定柱上部后侧设有头部模拟机构,所述摆动架和摆动臂之间设有停止机构。
7.进一步地,所述摆动机构包括有安装座、第一转动架、第一涡卷弹簧、旋转杆、第二涡卷弹簧、第二转动架、固定套、移动管、复位弹簧、橡胶套和旋转器;所述安装座内转动式连接有第一转动架,所述第一转动架左右两侧和安装盘之间均设有第一涡卷弹簧,所述第
一转动架上部转动式连接有旋转杆,所述旋转杆前后两侧和第一转动架之间均设有第二涡卷弹簧,所述旋转杆上设有第二转动架架,所述第二转动架架和安装盘通过螺栓连接,所述安装座顶部沿圆周方向均匀设有四个固定套,所述固定套内均滑动式连接有移动管,所述移动管底部和固定套内底壁之间均设有复位弹簧,所述固定套顶部均转动式连接有旋转器,所述旋转器顶部分别和安装盘底部转动式连接,所述安装盘底部和安装座顶部之间设有橡胶套。
8.进一步地,所述停止机构包括第三涡卷弹簧、触碰块和第二压力传感器,所述第三涡卷弹簧设置于摆动架和相邻的摆动臂之间,所述触碰块设置于摆动架底部后侧,所述第二压力传感器设置于摆动臂上。
9.进一步地,所述头部模拟机构包括有固定块、安装盒、移动柱、软性块和第一弹簧;所述固定柱后部上侧中间设有固定块,所述固定块顶部设有安装盒,所述安装盒内后侧设有第一弹簧,所述安装盒内开有v形槽,所述v形槽上滑动式连接有移动柱,所述移动柱前部设有软性块。
10.进一步地,还包括辅助前倾机构,所述辅助前倾机构包括有空心管、滑杆、第二弹簧、转轴、钢缆、第三弹簧和导向轮,所述空心管与安装盒前部左右两侧连接,所述空心管内均滑动式连接有滑杆,所述滑杆后侧和移动柱接触,所述滑杆和相邻的空心管内前壁之间均设有第三弹簧,所述第二弹簧设置于移动柱前侧和安装盒内前壁之间,所述转轴设置于双轴电机上侧的输出轴上,所述转轴上部均设有绕线轮,所述绕线轮上均绕卷有钢缆,所述导向轮转动式连接于安装盒底部左后侧和安装盒内右后侧,所述钢缆分别绕过相邻的导向轮,所述钢缆分为左侧钢缆和右侧钢缆,所述滑杆分为左侧滑杆和右侧滑杆,所述右侧钢缆穿过安装盒,右侧钢缆绕过移动柱和左侧滑杆连接,左侧钢缆和右侧滑杆连接。
11.进一步地,还包括有随机机构,所述随机机构包括有开槽板、旋转管、空心块、拨动块和第四弹簧;所述旋转管设置于双轴电机的下侧输出轴上,所述旋转管底部均设有空心块,所述空心块内均滑动式连接有拨动块,所述拨动块后侧和相邻的空心块内后壁之间均设有第四弹簧,所述开槽板套设在转动柱上部外侧。
12.进一步地,所述开槽板外侧均匀设有24个方槽,所述拨动块可卡在方槽上。
13.进一步地,还包括有防护机构,所述防护机构包括有底板、连接管和弹性防护带;所述底板设置于安装座前部,所述底板顶部沿边缘方向均匀设有6个连接管,所述同侧的两个连接管之间均设有弹性防护带。
14.有益效果:与现有技术相比,本发明具有以下优点:
15.(1)在使用本发明过程中,使用者拳击弹性套,第一压力传感器受到压力会发出信号给同侧的双轴电机,进而使得摆动臂迅速向前摆动出击,使用者可以进行躲避,如此在使用者拳击过程中,能够得到摆动臂的还击,可以提高交互性,同时提高拳击趣味性,从而克服在使用交互式拳击训练靶时,使用者不能得到对打的体验感,交互性差的缺点;
16.(2)在安装盘摆动过程中,在第一涡卷弹簧、第二涡卷弹簧和复位弹簧作用下,能够提高安装盘的稳定性,达到不倒翁的效果,而且使用者能够通过拳击软性块得到拳击人的感觉,同时可以释放压力;在左侧摆动臂向前摆动时,软性块向右侧摆动,在右侧摆动臂向前摆动时,软性块向左侧摆动,如此能够模拟人的手部和头部摆动的方向,增加使用者的使用感;
17.(3)通过拨动块和方槽之间的配合,能够自动将开槽板、转动柱和第一压力传感器进行转动,进而使得第一压力传感器位置进行随机改变,进而使得摆动臂的规律为随机式,这样会给使用者带来不同的体验。
附图说明
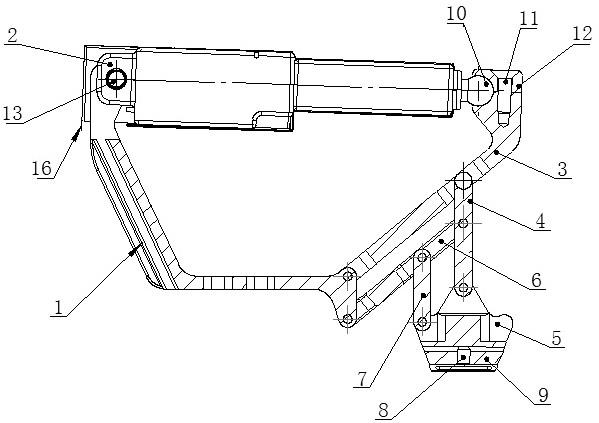
18.图1为本发明的第一种立体结构示意图;
19.图2为本发明的第二种立体结构示意图;
20.图3为本发明的第一种部分立体结构示意图;
21.图4为本发明的第二种部分立体结构示意图;
22.图5为本发明摆动机构的立体结构示意图;
23.图6为本发明摆动机构的立体结构剖视图;
24.图7为本发明头部模拟机构的立体结构示意图;
25.图8为本发明头部模拟机构的部分立体结构示意图;
26.图9为本发明前倾机构的第一种立体结构示意图;
27.图10为本发明前倾机构的第二种立体结构示意图;
28.图11为本发明前倾机构的立体结构剖视图;
29.图12为本发明随机机构的立体结构示意图;
30.图13为本发明随机机构的部分立体结构剖视图;
31.图14为本发明防护机构的立体结构示意图;
32.图15为本发明停止机构的第一种立体结构示意图。
33.图16为本发明停止机构的第二种立体结构示意图。
具体实施方式
34.下面结合附图对本发明的技术方案作进一步说明。
35.实施例1
36.如图1-4所示,本发明所述一种拳击对打训练用装置,包括有安装盘1、转动柱11、弹性套12、固定柱13、双轴电机14、摆动架15、摆动臂16、第一压力传感器17、摆动机构2、头部模拟机构3和停止机构7,安装盘1顶部中间焊接有固定柱13,固定柱13下部转动式连接有转动柱11,固定柱13外侧设有弹性套12,弹性套12能够保护使用者的手部,弹性套12套在转动柱11外侧,固定柱13后部左右两侧均通过螺栓设有双轴电机14,双轴电机14输出轴上均设有摆动架15,双轴电机14输出轴转动能够带动摆动架15进行转动,摆动架15上均转动式连接有摆动臂16,转动柱11下部左右两侧均设有第一压力传感器17,第一压力传感器17通过电性和同侧的双轴电机14连接,安装盘1底部设有摆动机构2,摆动机构2能够带动安装盘1进行摇晃,固定柱13上部后侧设有头部模拟机构3,摆动架15和摆动臂16之间设有停止机构7。
37.如图5和图6所示,摆动机构2包括有安装座20、第一转动架21、第一涡卷弹簧22、旋转杆23、第二涡卷弹簧24、第二转动架25、固定套26、移动管27、复位弹簧28、橡胶套29和旋转器210,安装座20内转动式连接有第一转动架21,第一转动架21左右两侧和安装盘1之间均设有第一涡卷弹簧22,在第一涡卷弹簧22的作用下,带动第一转动架21转动复位,第一转
动架21上部转动式连接有旋转杆23,旋转杆23前后两侧和第一转动架21之间均设有第二涡卷弹簧24,在第二涡卷弹簧24的作用下,带动旋转杆23转动复位,旋转杆23上设有第二转动架25架,第二转动架25架和安装盘1通过螺栓连接,安装座20顶部沿圆周方向均匀设有四个固定套26,固定套26内均滑动式连接有移动管27,移动管27底部和固定套26内底壁之间均设有复位弹簧28,复位弹簧28能够带动移动管27移动复位,固定套26顶部均转动式连接有旋转器210,旋转器210顶部分别和安装盘1底部转动式连接,安装盘1底部和安装座20顶部之间设有橡胶套29。
38.如图7和图8所示,头部模拟机构3包括有固定块30、安装盒31、移动柱32、软性块33和第一弹簧34,固定柱13后部上侧中间设有固定块30,固定块30顶部设有安装盒31,安装盒31内后侧设有第一弹簧34,安装盒31内开有v形槽,v形槽上滑动式连接有移动柱32,移动柱32能够在v形槽内滑动,移动柱32和第一弹簧34前侧连接,移动柱32前部设有软性块33,软性块33可以模拟人的头部。
39.如图15和图16所示,停止机构7包括有第三涡卷弹簧70、触碰块71和第二压力传感器72,摆动架15和相邻的摆动臂16之间均设有第三涡卷弹簧70,摆动架15底部后侧均设有触碰块71,摆动臂16上均设有第二压力传感器72,第二压力传感器72被触发后会控制同侧的双轴电机14输出轴进行反转复位。
40.使用者在进行拳击对打训练时,可以站在安装盘1前侧的位置,然后拳击弹性套12,弹性套12能够对使用者的拳头进行防护,避免使用者的拳头受伤,当拳击弹性套12右侧时,右侧的第一压力传感器17受到压力,第一压力传感器17将信号传送给右侧的双轴电机14,右侧的双轴电机14输出轴转动带动右侧的摆动架15和摆动臂16进行向前摆动,右侧的摆动臂16能够对使用者进行出击,使用者可以躲避摆动臂16的出击,当右侧的摆动臂16撞击到使用者时,会因为反作用力带动右侧的摆动臂16向后侧微微摆动,右侧的第三涡卷弹簧70被扭转,同时带动右侧的第二压力传感器72和旋转块接触,使得第二压力传感器72受到压力后控制右侧的双轴电机14进行反向运作复位,进而带动右侧的摆动架15和摆动臂16向后摆动复位,当右侧的摆动臂16和使用者分离后,在右侧的第三涡卷弹簧70作用下,带动右侧的摆动臂16和右侧的第二压力传感器72转动复位;当拳击弹性左侧时,左侧的第一压力传感器17受到压力,第一压力传感器17将信号传送给左侧的双轴电机14,左侧的双轴电机14输出轴转动带动左侧的摆动架15和摆动臂16进行向前摆动,左侧的摆动臂16能够对使用者进行出击,使用者可以躲避摆动臂16的出击,当左侧的摆动臂16撞击到使用者时,会因为反作用力带动左侧的摆动臂16向后侧微微摆动,左侧的第三涡卷弹簧70被扭转,同时带动左侧的第二压力传感器72和旋转块接触,使得第二压力传感器72受到压力后控制左侧的双轴电机14进行反向运作复位,进而带动左侧的摆动架15和摆动臂16向后摆动复位,当左侧的摆动臂16和使用者分离后,在左侧的第三涡卷弹簧70作用下,带动左侧的摆动臂16和左侧的第二压力传感器72转动复位,如此在使用者拳击过程中,能够得到摆动臂16的还击,可以提高交互性,同时提高拳击趣味性;在拳击弹性套12的过程中,安装盘1会随之进行前后左右摆动,在摆动过程中,旋转器210会随之摆动,而且移动管27会适应性的上下移动,同时复位弹簧28适应性的发生形变,复位弹簧28起到缓冲的作用,安装盘1在摆动过程中,能够带动第二转动架25进行左右摆动,旋转杆23进行转动,使得第二涡卷弹簧24进行适应性的发生形变,而且第一转动架21会进行前后摆动,同时能够使得第一涡卷弹簧22适应性的
发生形变,在安装盘1摆动过程中,橡胶套29适应性的发生形变,而且在第一涡卷弹簧22、第二涡卷弹簧24和复位弹簧28的配合下,能够将安装盘1迅速摆正,可以达到不倒翁的效果;使用者也可以拳击软性块33,使得软性块33和移动柱32进行摆动,第一弹簧34发生变形,当拳头和软性块33分离时,在第一弹簧34的作用下能够使得移动柱32和软性块33摆动复位,软性块33可以模拟人的头部,使用者能够通过拳击软性块33得到拳击人的感觉,同时可以释放压力。
41.实施例2
42.在实施例1的基础之上,如图1、图2、图9、图10和图11所示,还包括有辅助前倾机构4,能够带动移动柱32向前侧倾斜,辅助前倾机构4包括有空心管40、滑杆41、第二弹簧42、转轴43、钢缆44、第三弹簧45和导向轮46,安装盒31前部左右两侧均连接有空心管40,空心管40内均滑动式连接有滑杆41,滑杆41后侧和移动柱32接触,滑杆41能够对移动柱32进行限位,滑杆41和相邻的空心管40内前壁之间均设有第三弹簧45,第三弹簧45能够带动滑杆41进行移动复位,移动柱32前侧和安装盒31内前壁之间设有第二弹簧42,第二弹簧42能够将移动柱32向前拉动,双轴电机14上侧的输出轴上均设有转轴43,转轴43上部均设有绕线轮,双轴电机14输出轴转动通过转轴43带动绕线轮进行转动,绕线轮上均绕卷有钢缆44,安装盒31底部左后侧和安装盒31内右后侧均转动式连接有导向轮46,钢缆44分别绕过相邻的导向轮46,右侧的钢缆44穿过安装盒31,右侧的钢缆44绕过移动柱32和左侧的滑杆41连接,左侧的钢缆44和右侧的滑杆41连接。
43.初始时,第二弹簧42和第三弹簧45处于被拉伸状态,当左侧的双轴电机14运作时,左侧的双轴电机14输出轴转动带动左侧的绕线轮进行放钢缆44,此时在右侧的第三弹簧45以及第二弹簧42的作用下,使得右侧的滑杆41向前滑动,由于左侧的滑杆41保持对移动柱32进行限位的状态,因此移动柱32只能向右前侧进行移动,移动柱32带动软性块33向右前侧移动,此时软性块33向右前侧捶打,当左侧的双轴电机14进行反向运作时,左侧的双轴电机14输出轴反转带动左侧的绕线轮进行收卷钢缆44,此时通过钢缆44带动右侧的滑杆41向后移动复位,右侧第三弹簧45被拉伸,右侧的滑杆41向后移动复位时能够将移动柱32和软性块33向后推动复位;当右侧的双轴电机14运作时,右侧的双轴电机14输出轴转动带动右侧的绕线轮进行放钢缆44,此时在左侧的第三弹簧45以及第二弹簧42的作用下,使得左侧的滑杆41向前滑动,由于右侧的滑杆41保持对移动柱32进行限位的状态,因此移动柱32只能向左前侧进行移动,移动柱32带动软性块33向左前侧移动,此时软性块33向左前侧捶打,当右侧的双轴电机14进行反向运作时,右侧的双轴电机14输出轴反转带动右侧的绕线轮进行收卷钢缆44,此时通过钢缆44带动左侧的滑杆41向后移动复位,左侧第三弹簧45被拉伸,左侧的滑杆41向后移动复位时能够将移动柱32和软性块33向后推动复位;重复以上操作,即可实现在左侧摆动臂16向前摆动时,软性块33向右侧摆动,在右侧摆动臂16向前摆动时,软性块33向左侧摆动,如此能够模拟人的手部和头部摆动的方向,增加使用者的使用感。
44.实施例3
45.如图1、图2、图9、图12和图13所示,还包括有随机机构5,随机机构5包括有开槽板50、旋转管51、空心块52、拨动块53和第四弹簧56,双轴电机14的下侧输出轴上均设有旋转管51,双轴电机14下侧输出轴转动带动旋转管51进行转动,旋转管51底部均焊接有空心块52,空心块52内均滑动式连接有拨动块53,拨动块53后侧和相邻的空心块52内后壁之间均
设有第四弹簧56,转动柱11上部外侧套有开槽板50,开槽板50外侧均匀开有24个方槽,拨动块53能够卡在方槽上。
46.双轴电机14的下侧输出轴转动时能够带动旋转管51、空心块52和拨动块53进行转动,拨动块53转动能够带动开槽板50进行转动,使得转动柱11和第一压力传感器17进行旋转,双轴电机14的下侧输出轴反转时带动旋转管51、空心块52和拨动块53进行反转,当拨动块53和开槽板50接触时,使得拨动块53向后移动,第四弹簧56被压缩,当拨动块53和方槽接触时,在第四弹簧56的作用下,带动拨动块53向前移动复位卡进方槽内,重复以上操作即可使得转动柱11和第一压力传感器17进行转动,如此导致第一压力传感器17的位置不会锁定在左右两侧,可以随之改变第一压力传感器17的位置,而且在使用者在拳击过程中,会随机对任意一个第一压力传感器17施加压力,进而使得摆动臂16的规律为随机式,这样会给使用者带来不同的体验。
47.实施例4
48.如图1、图2和图14所示,还包括有防护机构6,能够对使用者进行防护,防护机构6包括有底板60、连接管61和弹性防护带62,安装座20前部焊接有底板60,底板60顶部沿边缘方向均匀通过螺栓设有6个连接管61,同侧的两个连接管61之间均设有弹性防护带62,弹性防护带62能够对使用者起到防护作用。
49.使用者可以站在底板60上,然后在拳击过程中,会出现身体倾倒状况,弹性防护带62能够对使用者进行防护,避免使用者身体受到伤害,提高使用过程中的安全性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。