技术特征:
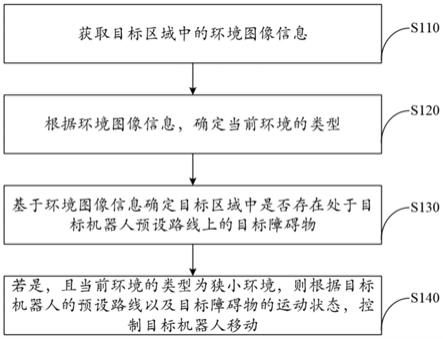
1.一种机器人的移动控制方法,其特征在于,包括:获取目标区域中的环境图像信息;根据所述环境图像信息,确定当前环境的类型,所述当前环境的类型包括:开阔环境或狭小环境;基于所述环境图像信息确定所述目标区域中是否存在处于目标机器人预设路线上的目标障碍物;若是,且当前环境的类型为所述狭小环境,则根据目标机器人的预设路线以及所述目标障碍物的运动状态,控制所述目标机器人移动,所述运动状态包括:移动状态或静止状态。2.如权利要求1所述的方法,其特征在于,所述根据目标机器人的预设路线以及所述目标障碍物的运动状态,控制所述目标机器人移动,包括:若所述目标障碍物处于所述移动状态,则根据目标障碍物的移动路径以及所述目标机器人的预设路线控制所述目标机器人移动;若所述目标障碍物处于所述静止状态,在所述目标障碍物的预设距离处保持静止。3.如权利要求2所述的方法,其特征在于,根据目标障碍物的移动路径以及所述目标机器人的预设路线控制所述目标机器人移动,包括:若所述目标障碍物的移动路径与所述目标机器人的预设路线的误差小于预设误差阈值,则控制所述目标机器人沿所述目标障碍物的移动路径移动。4.如权利要求1所述的方法,其特征在于,所述基于所述环境图像信息确定所述目标区域中是否存在处于目标机器人预设路线上的目标障碍物之后,所述方法还包括:若是,且当前环境的类型为所述开阔环境,则以预设避障路线绕开所述目标障碍物,并控制所述目标机器人沿所述预设路线行走。5.如权利要求1所述的方法,其特征在于,所述获取目标区域中的环境图像信息以及当前环境的类型之前,所述方法还包括:获取待检测区域的区域帧图像,所述区域帧图像中包括至少两个相邻帧图像;基于所述至少两个相邻帧图像判定所述目标机器人所在的待检测区域是否为运动区域,所述运动区域为在所述目标机器人的预设范围内存在运动物体的区域;若是,将所述待检测区域作为所述目标区域。6.如权利要求5所述的方法,其特征在于,所述获取待检测区域的区域帧图像之前,所述方法还包括:分别获取所述目标机器人所在的环境地图以及所述目标机器人的当前位置;根据所述目标机器人的当前位置确定所述目标机器人是否在所述环境地图中;若是,确定所述目标机器人当前所在的区域为所述待检测区域。7.如权利要求1所述的方法,其特征在于,所述基于所述环境图像信息确定所述目标区域中是否存在处于目标机器人预设路线上的目标障碍物,包括:根据所述环境图像信息判定所述目标机器人预设路线上是否存在障碍物;若是,基于所述目标机器人的环境数据信息判定所述目标区域中是否存在处于目标机器人预设路线上的目标障碍物,所述环境数据信息包括:激光雷达扫描数据以及深度摄像数据。
8.一种机器人的移动控制装置,其特征在于,包括:获取模块、确定模块以及控制模块;所述获取模块,用于获取目标区域中的环境图像信息;所述确定模块,用于根据所述环境图像信息,确定当前环境的类型,所述当前环境的类型包括:开阔环境或狭小环境;所述确定模块,还用于基于所述环境图像信息确定所述目标区域中是否存在处于目标机器人预设路线上的目标障碍物;若是,且当前环境的类型为所述狭小环境,所述控制模块用于根据目标机器人的预设路线以及所述目标障碍物的运动状态,控制所述目标机器人移动,所述运动状态包括:移动状态或静止状态。9.一种计算机设备,其特征在于,包括:存储器、处理器,所述存储器中存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现权利要求1至7任一项所述的方法的步骤。10.一种计算机可读存储介质,其特征在于,所述存储介质上存储有计算机程序,该计算机程序被处理器执行时,实现权利要求1至7中任一项所述方法的步骤。
技术总结
本申请提供一种机器人的移动控制方法、装置、设备及存储介质,属于机器人导航技术领域。该方法包括:获取目标区域中的环境图像信息;根据环境图像信息,确定当前环境的类型,当前环境的类型包括:开阔环境或狭小环境;基于环境图像信息确定目标区域中是否存在处于目标机器人预设路线上的目标障碍物;若是,且当前环境的类型为狭小环境,则根据目标机器人的预设路线以及目标障碍物的运动状态,控制目标机器人移动,运动状态包括:移动状态或静止状态。本申请可以避免机器人在流动人群中与人群发生碰撞,提高物流运输的安全性。提高物流运输的安全性。提高物流运输的安全性。
技术研发人员:冷晓琨 常琳 王松 白学林 柯真东 吴雨璁 何治成 黄贤贤
受保护的技术使用者:乐聚(深圳)机器人技术有限公司
技术研发日:2022.02.08
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。