技术特征:
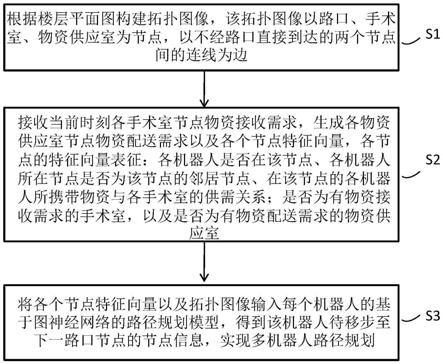
1.一种手术室医疗物资配送多机器人协同路径规划方法,其特征在于,包括:根据楼层平面图构建拓扑图像,该拓扑图像以路口、手术室、物资供应室为节点,以不经路口直接到达的两个节点间的连线为边;接收当前时刻各手术室节点物资接收需求,生成各物资供应室节点物资配送需求以及各个节点特征向量,各节点的特征向量表征:各机器人是否在该节点、各机器人所在节点是否为该节点的邻居节点、在该节点的各机器人所携带物资与各手术室的供需关系;是否为有物资接收需求的手术室,以及是否为有物资配送需求的物资供应室;将各个节点特征向量以及所述拓扑图像输入每个机器人的基于图神经网络的路径规划模型,得到该机器人待移步至下一路口节点的节点信息,实现多机器人路径规划。2.根据权利要求1所述的一种手术室医疗物资配送多机器人协同路径规划方法,其特征在于,每个节点特征向量的维度包括:各机器人是否在该节点,用向量x1表示,向量长度为机器人总个数,对于每个机器人,其在该节点用“1”表示,不在该节点用“0”表示;在该节点的各机器人的所携带物资信息,用向量x2表示,每个在该节点的机器人对应一个长度为手术室总个数的子向量,该子向量中每个元素表示每个手术室所需的物资是否在该机器人所携带的物资中存在,若是,用“1”表示,若否,用“0”表示;是否属于各机器人所在节点的邻居节点,用向量x3表示,向量长度为机器人总个数,对于每个机器人,其所在节点为该节点的邻居节点,则用“1”表示,不为该节点的邻居节点,则用“0”表示;是否为有物资接收需求的手术室,用向量x4表示,向量长度为1,为有物资需求的手术室用“1”表示,不为有物资需求的手术室用“0”表示;是否为存在物资配送需求的物资供应室,用向量x5表示,向量长度为1,若为存在物资配送需求的物资供应室,用“1”表示,若不为存在物资配送需求的物资供应室,用“0”表示;向量x1、x2、x3、x4、x5通过串接构成该节点特征向量。3.根据权利要求2所述的一种手术室医疗物资配送多机器人协同路径规划方法,其特征在于,向量x4中,对有物资需求的手术室,用大于1的数值表示,数值由其物资接收需求的紧急程度确定;向量x5中,对存在物资配送需求的物资供应室,用大于1的数值表示,数值由其物资配送需求的紧急程度确定。4.根据权利要求1所述的一种手术室医疗物资配送多机器人协同路径规划方法,其特征在于,采用所述路径规划模型在进行路径规划时,将每条边的长度作为该边的权重,所采用的邻接矩阵中各元素的取值由各边的权重确定。5.根据权利要求1所述的一种手术室医疗物资配送多机器人协同路径规划方法,其特征在于,每个机器人的路径规划模型的训练方法为:在所述楼层平面图对应的楼层平面内医疗物资配送场景中,搜集数据样本,构建训练样品集,其中,每个训练样本包括作为模型输入的某一时刻下各路口节点特征向量以及作为模型输出标签的该机器人待移步至下一路口节点的节点信息;将所述训练样本集输入图神经网络,通过损失函数迭代更新所述图神经网络的参数,得到该机器人的路径规划模型。
6.一种医疗物资配送机器人路径规划系统,其特征在于,包括:数据处理单元,用于接收当前时刻特定楼层内各手术室节点物资接收需求;并根据该特定楼层内的物资存放信息和拓扑图像,生成各物资供应室节点物资配送需求,同时生成该拓扑图像中各个节点特征向量,各节点的特征向量表征:各机器人是否在该节点、各机器人所在节点是否为该节点的邻居节点、在该节点的各机器人所携带物资与各手术室的供需关系;是否为有物资接收需求的手术室,以及是否为有物资配送需求的物资供应室;处理器,用于将各个节点特征向量以及所述拓扑图像输入每个机器人的基于图神经网络的路径规划模型,得到该机器人待移步至下一路口节点的节点信息,实现多机器人路径规划。7.根据权利要求6所述的一种医疗物资配送机器人路径规划系统,其特征在于,每个节点特征向量的维度包括:各机器人是否在该节点,用向量x1表示,向量长度为机器人总个数,对于每个机器人,其在该节点用“1”表示,不在该节点用“0”表示;在该节点的各机器人的所携带物资信息,用向量x2表示,每个在该节点的机器人对应一个长度为手术室总个数的子向量,该子向量中每个元素表示每个手术室所需的物资是否在该机器人所携带的物资中存在,若是,用“1”表示,若否,用“0”表示;是否属于各机器人所在节点的邻居节点,用向量x3表示,向量长度为机器人总个数,对于每个机器人,其所在节点为该节点的邻居节点,则用“1”表示,不为该节点的邻居节点,则用“0”表示;是否为有物资接收需求的手术室,用向量x4表示,向量长度为1,为有物资需求的手术室用“1”表示,不为有物资需求的手术室用“0”表示;是否为存在物资配送需求的物资供应室,用向量x5表示,向量长度为1,若为存在物资配送需求的物资供应室,用“1”表示,若不为存在物资配送需求的物资供应室,用“0”表示;向量x1、x2、x3、x4、x5通过串接构成该节点特征向量。8.根据权利要求7所述的一种手术室医疗物资配送多机器人协同路径规划方法,其特征在于,向量x4中,对有物资需求的手术室,用大于1的数值表示,数值由其物资接收需求的紧急程度确定;向量x5中,对存在物资配送需求的物资供应室,用大于1的数值表示,数值由其物资配送需求的紧急程度确定。9.根据权利要求6所述的一种手术室医疗物资配送多机器人协同路径规划方法,其特征在于,所述路径规划模型在进行路径规划时,将每条边的长度作为该边的权重,所采用的邻接矩阵中各元素的取值由各边的权重确定。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序被处理器运行时控制所述存储介质所在设备执行如权利要求1至5任一项所述的一种手术室医疗物资配送多机器人协同路径规划方法。
技术总结
本发明属于路径规划领域,具体涉及一种手术室医疗物资配送多机器人协同路径规划方法及其应用,包括:根据楼层平面图构建拓扑图像,图像以路口、手术室、物资供应点为节点,不经路口可直接到达的两个节点通过边相连,路径长度为边的权重;获取人工配送医疗物资的每步决策并打上标签,构建表征各时刻物资配送需求的节点特征向量及其对应的物资配送路径规划标签,训练生成图神经网络的信息更新模型和外层感知机,形成基于图神经网络的多机器人协同路径规划模型,实现输入手术室地图和配送需求对应输出预测的路径规划。本发明建立的多机器人协同路径规划方法,可利用手术室地图图像实现快速路径规划,为机器人路径提供快速、有效的参考。考。考。
技术研发人员:余遥 高玉月 田翀 周诚 黎娆
受保护的技术使用者:华中科技大学
技术研发日:2022.01.20
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。