技术特征:
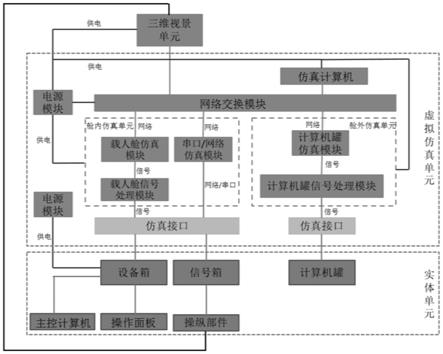
1.一种全海深载人潜水器控制系统仿真平台,其特征在于,包括:实体单元、虚拟仿真单元以及三维视景单元;实体单元,用于发送操作信号至虚拟仿真单元,同时接收虚拟仿真单元产生的模拟仿真信号,以实现模拟仿真信号解析后的虚拟参数应用于实体单元中;虚拟仿真单元,用于接收并处理实体单元发送的操作信号,对接收到操作信号进行仿真,并对操作信号仿真后得到的仿真运动状态数据进行显示,以对实体单元对应功能进行验证;并将仿真运动状态数据发送至三维视景单元,还用于产生模拟仿真信号输出至实体单元;三维视景单元,用于接收虚拟仿真单元发送的仿真运动状态数据,并实时进行解析,结合建立的潜水器三维模型以及设置的场景模型,实现潜水器在不同场景下的动态模拟。2.根据权利要求1所述的一种全海深载人潜水器控制系统仿真平台,其特征在于,所述操作信号,包括:数字量信号、模拟量信号、串口信号以及网络信号。3.根据权利要求1所述的一种全海深载人潜水器控制系统仿真平台,其特征在于,所述模拟仿真信号,包括:仿真后的数字量信号、模拟量信号、串口信号以及网络信号。4.根据权利要求1所述的一种全海深载人潜水器控制系统仿真平台,其特征在于,所述实体单元,包括:主控计算机、操作面板、操纵部件、设备箱、信号箱以及计算机罐;所述主控计算机、操作面板、操纵部件、设备箱以及信号箱均设于潜水器舱体内;所述主控计算机与设备箱连接,用于控制设备箱接收模拟仿真信号或发送操作信号;所述操作面板通过设备箱与虚拟仿真单元连接,用于在主控计算机控制下,将产生的数字量信号与模拟量信号,经设备箱输出虚拟仿真单元;所述操纵部件通过信号箱与虚拟仿真单元连接,用于在主控计算机控制下,将产生的串口信号或网络信号,经信号箱输出虚拟仿真单元;所述计算机罐设于潜水器舱体外,用于产生实体单元的舱外设备的数字信号和模拟信号输出至虚拟仿真单元;所述操纵部件还与三维视景单元连接,以通过操纵部件对三维视景单元的模拟潜水器实现运动操纵,实现科普演示海洋模拟环境。5.根据权利要求1所述的一种全海深载人潜水器控制系统仿真平台,其特征在于,所述虚拟仿真单元,包括:网络交换模块、仿真计算机、舱内仿真单元以及舱外仿真单元;所述舱内仿真单元和舱外仿真单元均通过网络交换模块与仿真计算机连接;所述仿真计算机通过网络交换模块与三维视景单元连接;所述舱内仿真单元通过仿真接口分别与实体单元的设备箱和信号箱连接;所述舱外仿真单元通过仿真接口与计算机罐连接。6.根据权利要求5所述的一种全海深载人潜水器控制系统仿真平台,其特征在于,所述舱内仿真单元,包括:载人舱仿真模块、载人舱信号处理模块、串口/网络仿真模块;所述仿真计算机依次通过网络交换模块、载人舱仿真模块、载人舱信号处理模块、仿真接口与设备箱连接,用于仿真计算机通过网络交换模块,控制载人舱仿真模块输出仿真后的数字量信号或模拟量信号,经载人舱信号处理模块进行隔离、放大处理后,输出至实体单元;同时实体单元的数字量或模拟量信号通过信号处理模块的隔离、放大处理后,由载人舱仿真模块转换为网络信号传输至仿真计算机;
所述仿真计算机依次通过网络交换模块、串口/网络仿真模块、仿真接口与信号箱连接,用于在仿真计算机控制下,向实体单元输出仿真后的网络信号或串口信号,同时通过该模块接收实体单元的网络或串口信号,并转换为网络信号后传输至仿真控制计算机。7.根据权利要求5所述的一种全海深载人潜水器控制系统仿真平台,其特征在于,所述舱外仿真单元,包括:相互连接的计算机罐仿真模块和计算机罐信号处理器;所述计算机罐仿真模块通过网络交换模块与仿真计算机连接,用于仿真计算机通过网络交换模块,控制计算机罐仿真模块输出仿真后的数字量信号或模拟量信号至计算机罐信号处理器;所述计算机罐信号处理器通过仿真接口与计算机罐连接,用于对计算机罐仿真模块输出数字量或模拟量仿真信号进行隔离、放大处理后,输出至实体单元;同时,接收实体单元的数字量或模拟量信号进行隔离、放大处理后,并转换为网络信号发送至计算机罐仿真模块。8.根据权利要求1所述的一种全海深载人潜水器控制系统仿真平台,其特征在于,所述虚拟仿真单元还包括电子负载;所述电子负载的输入端与设备箱和计算机罐连接,输出端通过串口与仿真计算机互通,用于接收实体单元的实体设备的数字量信号或模拟量信号,仿真计算机设置电子负载产生的功率,测试实体单元是否能够承受相应功率对应的电流强度,以实现模拟潜水器真实设备的实际负载功能。9.一种全海深载人潜水器控制及仿真方法,其特征在于,包括以下步骤:1)首先将实体单元进行组装,组装成潜水器控制系统,并与虚拟仿真单元进行连接;2)虚拟仿真单元的仿真计算机将产生模拟仿真信号对应通过舱内仿真单元或舱外仿真单元输出至实体单元相对应的部件;实体单元接收虚拟仿真单元产生的模拟仿真信号,以实现虚拟参数应用于实体单元中;实体单元接收到虚拟仿真单元产生的模拟仿真信号后对模拟仿真信号进行解析,将模拟仿真信号中的虚拟参数应用于实体单元中后,实时显示当前潜水器的运动状态;潜航员针对目前潜水器的运动状态进行操作,控制实体单元中操作面板和操纵部件产生操作信号通过至舱内仿真单元或舱外仿真单元发送至仿真计算机,并实时显示仿真运动状态数据;同时,仿真计算机根据仿真运动状态数据进行潜水器控制系统功能测试;3)仿真计算机将仿真运动状态数据发送至三维视景单元,三维视景单元对仿真运动状态数据进行实时解析,结合潜水器三维模型以及设置的场景模型,实现潜水器在不同场景下的动态模拟。10.根据权利要求9所述的一种全海深载人潜水器控制及仿真方法,其特征在于,所述仿真计算机根据仿真运动状态数据进行潜水器控制系统功能测试,具体为:针对实体单元输出数字量信号,通过操作面板开关进行控制,开关动作后,在仿真计算机上显示数字量信号输出状态指示,与设定的阈值比对,验证数字量信号输出控制是否正常;针对输入至实体单元数字量信号,仿真计算机仿真后产生的模拟仿真信号,输出至实体单元,在实体单元的主控计算机中观察数字量输入信号采集是否正常,以验证数字量信号输入控制是否正常;
针对实体单元模拟量输出信号,通过操纵操纵部件,在仿真计算机中操纵部件对应的实体设备控制电压是否正常,同时观察实体单元所接收的虚拟仿真单元模拟反馈模拟仿真信号,以模拟推进器电流与转速,并验证模拟量信号输出控制是否正常;在操纵潜水器的同时,观察三维视景单元中模拟潜水器的运动与操纵是否一致,以验证三维模拟运动是否正常;针对输入至实体单元模拟量信号,通过仿真计算机模拟输出实体单元的模拟量信号,在实体单元的主控计算机中观察接收模拟量信号的实体设备的作业是否正常,验证模拟量信号输入控制是否正常;针对串口信号,仿真计算机根据采集通信协议,自动计算并实时向实体单元发送模拟串口数据,同时根据需求,在仿真计算机中进行串口通信参数设置;针对网络信号,仿真计算机根据网络通信协议,模拟其他系统网络信号,实时与实体单元进行通信,并判断网络通信状态及数据是否正常;同时根据需求,在仿真计算机中进行网络通信参数设置。
技术总结
本发明属于潜水器仿真系统领域,具体说是一种全海深载人潜水器控制系统仿真平台,包括:实体单元、虚拟仿真单元以及三维视景单元;实体单元,用于发送操作信号至虚拟仿真单元,同时接收虚拟仿真单元产生的模拟仿真信号;虚拟仿真单元,用于接收并处理实体单元发送的操作信号,对接收到操作信号进行仿真,并对操作信号仿真后得到的仿真运动状态数据进行显示,以对实体单元对应功能进行验证;并将仿真运动状态数据发送至三维视景单元,还产生模拟仿真信号输出至实体单元;本发明的仿真控制电路针对实体单元的每一路接口信号均进行功能性及通断性检测,保证控制系统功能检测的全面性,同时结合电子负载,在仿真平台上对控制系统的真正负载能力测试。真正负载能力测试。真正负载能力测试。
技术研发人员:杨鸣宇 赵洋 赵兵 陶祎春 卢广宇
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:2021.12.27
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。