1.本发明涉及航天飞行器结构产品的技术领域,具体地,涉及基于卫星桁架结构的仿真模型提取方法及系统,尤其涉及一种基于卫星桁架结构的仿真模型快速提取方法。
背景技术:
2.目前,卫星研制面对多型号并举、高密度发射、质量可靠性要求高、研制周期要求短的形式。要求卫星结构设计高质量、高效率和高效益,这就需要结构设计仿真精细化、快速化,并且能够快速适应结构设计的更改,不断迭代。
3.在公开号为cn106649981a的专利文献中公开了一种针对卫星桁架结构三维模型自适应创建和更新的方法,包括建立桁架结构对应的骨架模型,在骨架模型中定义桁架接头中心点坐标及依附中心点的局部参照坐标系;将上述接头中心点首尾连接,形成桁架结构对应的线框构型;定义参数化杆件模板并进行桁架杆件实体化建模和装配;基于接头中心点,将汇集于同一接头的杆件参数化截面几何信息导入接头三维模型后进行接头实体化建模和装配;当骨架中线框构型发生更改或接头中心点坐标更新时,桁架结构系统以自适应的方式进行重构或者重新创建、更新结构元件。该发明着重于卫星桁架结构三维模型的创建和状态的快速更新迭代的方法。
4.在公告号为cn108470094b的专利文献中公开了一种桁架结构三维模型智能生成方法,采用分阶段的搭接式框架结构智能化辅助设计,将搭接式框架结构的三维装配建模分割为定性的搭接关系判定与定量的几何计算两个过程,使用深度学习与朱刘算法结合的方法解决了其中关键的第一阶段,即定性的搭接关系判定过程。然后使用几何计算的方法完成第二阶段,最终实现桁架结构的智能化三维建模。该发明着重于卫星桁架结构三维模型的参数化智能化设计的方法。
5.在公开号为cn106777565a的专利文献中公开了一种卫星桁架快速三维标注方法,基于计算机辅助设计技术、pro/e二次开发技术,包括以下步骤:1、用pro/e二次开发软件创建桁架三维模型;2、在pro/e中打开完整的桁架三维模型;3、对桁架三维模型的接头进行三维标注,标识出坐标值;4、对桁架三维模型进行参数、材料设置;5、对桁架三维模型中的产品进行加工模具分析;6、在pro/e中进行桁架三维标注视图设计;7、通过明细表查看器查看桁架零部件信息和装配信息。该发明着重于卫星桁架结构三维模型的快速标注的方法。
6.在公开号为cn111879545a的专利文献中公开了一种地面实验室遥感飞行模拟平台及控制方法。一种地面实验室遥感飞行模拟平台,其中,座椅地轨、地板、布线盒、非气密开口气密罩、下视光学窗口、照相舱门和非气密保护门手动开启机构、卫星导航信号模拟器安装在机舱内部;桁架与机身底部连接,吊舱与桁架连接,天线罩安装在机身外表面;机身安装托架安装在机身结构下方,登机梯安装在机身侧面门口处;电源系统的一端安装在机身之外,另一端安装在机舱内部。
7.现有的卫星仿真建模方法基本上与三维设计是分离的,需要设计师自行在设计与仿真之间处理设计信息传递。因此,需要提出一种技术方案以改善上述技术问题。
技术实现要素:
8.针对现有技术中的缺陷,本发明的目的是提供一种基于卫星桁架结构的仿真模型提取方法及系统。
9.根据本发明提供的一种基于卫星桁架结构的仿真模型提取方法及系统,所述方法包括如下步骤:
10.步骤s1:根据仿真需求,预先选择提取桁架壳体三维模型或者提取桁架杆线三维模型;
11.步骤s2:提取桁架壳体三维模型过程中,根据桁架三维模型,自动读取杆件与接头外部轮廓,分别复制创建杆件与接头外部轮廓曲面;
12.步骤s3:提取桁架壳体三维模型过程中,根据预先设定的配置条件,杆件与接头外部轮廓曲面按照连接情况作延伸搭接处理,使所有外部轮廓连接成一个整体,生成并输出得到的桁架壳体三维模型;
13.步骤s4:提取桁架杆线三维模型过程中,根据桁架三维模型,自动分析创建接头中心点,以接头中心点作为桁架连接点,按照桁架的连接关系生成各杆件连接点之间的几何杆线;
14.步骤s5:提取桁架杆线三维模型的过程中,读取并以xml格式导出桁架杆件信息,生成并输出得到的桁架杆线三维模型。
15.优选地,所述步骤s5中的桁架杆件信息包括每根杆件的编号、模型名称、截面规格、预设坐标系下的起点终点坐标、预设坐标系下杆线在空间中的方向向量。
16.优选地,将桁架模型以壳体与杆线两种方式分别输出对应的桁架壳体三维模型与桁架杆线三维模型,所述桁架壳体三维模型与桁架杆线三维模型适用于不同的仿真过程。
17.优选地,在桁架壳体三维模型生成过程中,提取出桁架中的杆件外部轮廓与接头外部轮廓,按照连接情况作延伸搭接处理,所有外部轮廓连接成一个整体,生成桁架壳体三维模型;
18.根据桁架三维模型,读取并复制杆件与接头的外部轮廓;根据预先设定的配置条件,杆件与接头外部轮廓曲面按照连接情况作延伸搭接处理,所有外部轮廓连接成一个整体,生成并输出桁架壳体三维模型。
19.优选地,在桁架杆线三维模型生成过程中,自动分析创建接头中心点作为桁架连接点,按照桁架的连接关系生成各杆件连接点之间的几何杆线,生成桁架杆线三维模型。
20.优选地,根据桁架三维模型,读取并创建接头中心点,作为杆件连接点;按照桁架的连接关系生成各杆件连接点之间的几何杆线,生成桁架杆线三维模型。
21.优选地,在桁架杆线三维模型生成过程中,以xml格式导出桁架杆件信息,桁架杆件信息包括每根杆件的编号、模型名称、截面规格、预设坐标系下的起点终点坐标、预设坐标系下杆线在空间中的方向向量。
22.优选地,以xml格式导出桁架杆件信息,包括每根杆件的编号、模型名称、截面规格、预设坐标系下的起点终点坐标、预设坐标系下杆线在空间中的方向向量,生成并输出桁架杆线三维模型。
23.本发明还提供一种基于卫星桁架结构的仿真模型提取系统,所述系统包括如下模块:
24.模块m1:根据仿真需求,预先选择提取桁架壳体三维模型或者提取桁架杆线三维模型;
25.模块m2:提取桁架壳体三维模型过程中,根据桁架三维模型,自动读取杆件与接头外部轮廓,分别复制创建杆件与接头外部轮廓曲面;
26.模块m3:提取桁架壳体三维模型过程中,根据预先设定的配置条件,杆件与接头外部轮廓曲面按照连接情况作延伸搭接处理,使所有外部轮廓连接成一个整体,生成并输出得到的桁架壳体三维模型;
27.模块m4:提取桁架杆线三维模型过程中,根据桁架三维模型,自动分析创建接头中心点,以接头中心点作为桁架连接点,按照桁架的连接关系生成各杆件连接点之间的几何杆线;
28.模块m5:提取桁架杆线三维模型的过程中,读取并以xml格式导出桁架杆件信息,生成并输出得到的桁架杆线三维模型。
29.优选地,所述模块m5中的桁架杆件信息包括每根杆件的编号、模型名称、截面规格、预设坐标系下的起点终点坐标、预设坐标系下杆线在空间中的方向向量。
30.与现有技术相比,本发明具有如下的有益效果:
31.1、本发明将桁架模型以壳体与杆线两种方式分别输出对应的桁架壳体三维模型与桁架杆线三维模型,适用于不同的仿真过程;
32.2、本发明在桁架壳体三维模型生成过程中,提取出桁架中的杆件外部轮廓与接头外部轮廓,并按照连接情况作延伸搭接处理,使所有外部轮廓连接成一个整体,生成桁架壳体三维模型。大大减少了仿真过程中曲面连接的工作量;
33.3、本发明在桁架杆线三维模型生成过程中,自动分析创建接头中心点作为桁架连接点,按照桁架的连接关系生成各杆件连接点之间的几何杆线,生成桁架杆线三维模型;
34.4、本发明在桁架杆线三维模型生成过程中,能够以xml格式导出桁架杆件信息,包括每根杆件的编号、模型名称、截面规格、预设坐标系下的起点终点坐标、预设坐标系下杆线在空间中的方向向量等。设计人员可以直接根据导出的信息判断与确认桁架三维模型装配与从属关系,提高了仿真分析工作的便利程度;
35.5、本发明通过定制开发仿真提取软件,打通数字化技术在设计与仿真之间的障碍,将三维模型信息无损、快速、有效的传递和反馈给仿真建模,提升卫星仿真效率并降低成本;
36.6、本发明创新使用了三维建模软件,在此基础上,实现了将设计信息、工艺信息、单机信息等内容,简洁、快速、有效的传递和反馈到仿真环节,提高了卫星仿真效率并降低了仿真时间与人力成本。
附图说明
37.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
38.图1为本发明基于卫星桁架结构的仿真模型快速提取方法的流程图;
39.图2为本发明基于卫星桁架结构的仿真模型快速提取方法的壳体三维模型创建界面及桁架三维模型示意图;
40.图3为本发明基于卫星桁架结构的仿真模型快速提取方法的壳体三维模型轮廓搭接界面及桁架壳体三维模型示意图;
41.图4为本发明基于卫星桁架结构的仿真模型快速提取方法的壳体三维模型发布界面;
42.图5为本发明基于卫星桁架结构的仿真模型快速提取方法的杆线三维模型创建界面及桁架三维模型示意图;
43.图6为本发明基于卫星桁架结构的仿真模型快速提取方法中杆线三维模型杆线连接界面及桁架杆件三维模型示意图;
44.图7为本发明基于卫星桁架结构的仿真模型快速提取方法中杆件导出信息示意图及杆线三维模型导出发布界面示意图。
具体实施方式
45.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
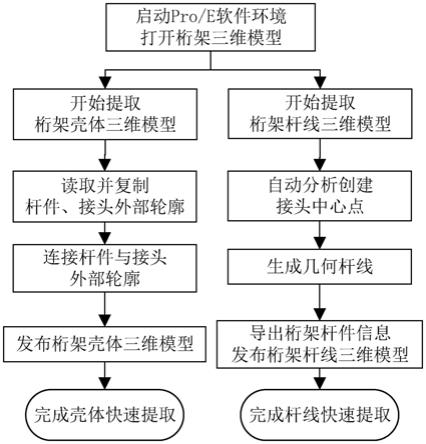
46.参照图1和图2,本发明提供一种基于卫星桁架结构的仿真模型提取方法及系统,包括如下步骤:步骤s1:根据仿真需求,预先选择提取桁架壳体三维模型或者提取桁架杆线三维模型;步骤s2:提取桁架壳体三维模型过程中,根据桁架三维模型,自动读取杆件与接头外部轮廓,分别复制创建杆件与接头外部轮廓曲面;步骤s3:提取桁架壳体三维模型过程中,根据预先设定的配置条件,杆件与接头外部轮廓曲面按照连接情况作延伸搭接处理,使所有外部轮廓连接成一个整体,生成并输出得到的桁架壳体三维模型;步骤s4:提取桁架杆线三维模型过程中,根据桁架三维模型,自动分析创建接头中心点,以接头中心点作为桁架连接点,按照桁架的连接关系生成各杆件连接点之间的几何杆线;步骤s5:提取桁架杆线三维模型的过程中,读取并以xml格式导出桁架杆件信息,包括每根杆件的编号、模型名称、截面规格、预设坐标系下的起点终点坐标、预设坐标系下杆线在空间中的方向向量等,生成并输出得到的桁架杆线三维模型。
47.参照图3和图4,将桁架模型以壳体与杆线两种方式分别输出对应的桁架壳体三维模型与桁架杆线三维模型,适用于不同的仿真过程;在桁架壳体三维模型生成过程中,提取出桁架中的杆件外部轮廓与接头外部轮廓,并按照连接情况作延伸搭接处理,使所有外部轮廓连接成一个整体,生成桁架壳体三维模型;在桁架杆线三维模型生成过程中,自动分析创建接头中心点作为桁架连接点,按照桁架的连接关系生成各杆件连接点之间的几何杆线,生成桁架杆线三维模型;在桁架杆线三维模型生成过程中,能够以xml格式导出桁架杆件信息,包括每根杆件的编号、模型名称、截面规格、预设坐标系下的起点终点坐标、预设坐标系下杆线在空间中的方向向量等。
48.参照图5和图6,根据桁架三维模型,读取并复制杆件与接头的外部轮廓;根据预先设定的配置条件,杆件与接头外部轮廓曲面按照连接情况作延伸搭接处理,使所有外部轮廓连接成一个整体,生成并输出桁架壳体三维模型;根据桁架三维模型,读取并创建接头中心点,作为杆件连接点;按照桁架的连接关系生成各杆件连接点之间的几何杆线,生成桁架
杆线三维模型;以xml格式导出桁架杆件信息,包括每根杆件的编号、模型名称、截面规格、预设坐标系下的起点终点坐标、预设坐标系下杆线在空间中的方向向量等,生成并输出桁架杆线三维模型。
49.本发明还提供一种基于卫星桁架结构的仿真模型提取系统,所述系统包括如下模块:
50.模块m1:根据仿真需求,预先选择提取桁架壳体三维模型或者提取桁架杆线三维模型;模块m2:提取桁架壳体三维模型过程中,根据桁架三维模型,自动读取杆件与接头外部轮廓,分别复制创建杆件与接头外部轮廓曲面;模块m3:提取桁架壳体三维模型过程中,根据预先设定的配置条件,杆件与接头外部轮廓曲面按照连接情况作延伸搭接处理,使所有外部轮廓连接成一个整体,生成并输出得到的桁架壳体三维模型;模块m4:提取桁架杆线三维模型过程中,根据桁架三维模型,自动分析创建接头中心点,以接头中心点作为桁架连接点,按照桁架的连接关系生成各杆件连接点之间的几何杆线;模块m5:提取桁架杆线三维模型的过程中,读取并以xml格式导出桁架杆件信息,生成并输出得到的桁架杆线三维模型;桁架杆件信息包括每根杆件的编号、模型名称、截面规格、预设坐标系下的起点终点坐标、预设坐标系下杆线在空间中的方向向量。
51.本发明将桁架模型以壳体与杆线两种方式分别输出对应的桁架壳体三维模型与桁架杆线三维模型,适用于不同的仿真过程;在桁架壳体三维模型生成过程中,提取出桁架中的杆件外部轮廓与接头外部轮廓,并按照连接情况作延伸搭接处理,使所有外部轮廓连接成一个整体,生成桁架壳体三维模型。大大减少了仿真过程中曲面连接的工作量。
52.本发明在桁架杆线三维模型生成过程中,自动分析创建接头中心点作为桁架连接点,按照桁架的连接关系生成各杆件连接点之间的几何杆线,生成桁架杆线三维模型;在桁架杆线三维模型生成过程中,能够以xml格式导出桁架杆件信息,包括每根杆件的编号、模型名称、截面规格、预设坐标系下的起点终点坐标、预设坐标系下杆线在空间中的方向向量等。设计人员可以直接根据导出的信息判断与确认桁架三维模型装配与从属关系,提高了仿真分析工作的便利程度。
53.本发明通过定制开发仿真提取软件,打通数字化技术在设计与仿真之间的障碍,将三维模型信息无损、快速、有效的传递和反馈给仿真建模,提升卫星仿真效率并降低成本;本发明创新使用了三维建模软件,在此基础上,实现了将设计信息、工艺信息、单机信息等内容,简洁、快速、有效的传递和反馈到仿真环节,提高了卫星仿真效率并降低了仿真时间与人力成本。
54.本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
55.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影
响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。