1.本发明涉及智能门锁技术领域,具体为一种基于红外和陀螺仪控制的智能门锁及其上锁方法。
背景技术:
2.传统的门锁都是一些机械锁,即通过具有一定外形结构的钥匙进行开锁,比机械锁更高级一点的是磁卡锁,这种锁的实现原理主要是使用了无限射频识别技术使得锁安全性更高,虽然这种锁的钥匙外形、材料发生变化,但是出门时依旧要随身携带,存在易丢失、易被窃取等安全隐患;而密码锁虽然不需要钥匙,但是却很容易忘记密码,尤其是针对记忆力差的使用者来说更加不方便,因而市面上出现了集多种功能于一体的智能门锁。
3.传统智能门锁内部的上锁结构比较单一,通常会由于误碰发生锁止结构的误上锁,且传统的上锁结构有时会由于遮挡物的遮挡而发生误上锁,不方便关门的时候进行上锁。因此我们对此做出改进,提出一种基于红外和陀螺仪控制的智能门锁及其上锁方法。
技术实现要素:
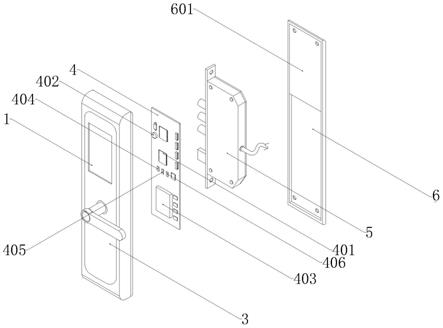
4.为了解决上述技术问题,本发明提供了如下的技术方案:本发明一种基于红外和陀螺仪控制的智能门锁,包括智能门锁本体,所述智能门锁本体一侧通过穿钉固定连接有门体,所述智能门锁本体包括前盖板、集成主板、门锁锁止组件以及后盖板,所述后盖板内部设置有供电模块,所述集成主板包括主控模块、电机驱动反馈模块、检测模块、密码解锁模块、指纹识别模块以及人脸识别模块,所述检测模块包括红外感应模块和陀螺仪检测模块。
5.作为本发明的一种优选技术方案,所述前盖板顶部设置有触控显示屏,所述触控显示屏与所述主控模块内部信号连接,所述供电模块与所述主控模块电性连接,且所述供电模块内部设置有电池组。
6.作为本发明的一种优选技术方案,所述集成主板一侧与所述前盖板内部一侧通过螺钉固定连接,所述门体内部开设有安装孔,所述门锁锁止组件设置于所述安装孔内部,且所述门锁锁止组件一侧与所述前盖板内部一个卡接。
7.作为本发明的一种优选技术方案,所述后盖板安装于所述安装孔另一侧,且所述后盖板通过穿钉与所述前盖板一侧固定连接。
8.作为本发明的一种优选技术方案,所述门锁锁止组件内部设置有用于驱动锁芯元件的微型电机,且所述微型电机与所述电机驱动反馈模块信号连接。
9.作为本发明的一种优选技术方案,所述红外感应模块包括红外传感器一和红外传感器二,所述红外传感器一设置于所述智能门锁本体内部,所述红外传感器二与所述红外传感器一呈对称设置,所述红外传感器二通过门框固定连接,且所述红外传感器一与所述红外传感器二皆与所述红外感应模块内部信号连接。
10.作为本发明的一种优选技术方案,所述陀螺仪检测模块内部设置有用于检测震动
和角度的震动检测模块和角度检测模块。
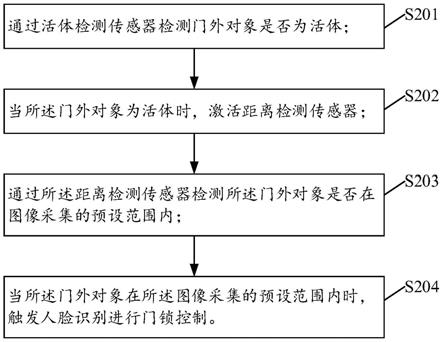
11.一种基于红外和陀螺仪控制的智能门锁上锁方法,其特征在于,包括如下步骤:s1:门体位置的确定,通过手推使门体进入门框内部,或使门体处于打开状态;s2:智能门锁本体进行检测判定,智能门锁内部的检测模块检测是否需要进行上锁,并进行判定;s3:判定依据:红外感应模块内部的红外传感器一与红外传感器二是否对准,并建立信号传输通路;陀螺仪检测模块内部的震动检测模块是否检测到关门的震动,以及角度检测模块内部检测是否处于门关闭角度;s4:异常判定的处理:如果红外感应模块内部的红外传感器一与红外传感器二未对准,信号传输通路不能够建立,则说明门体没有进入到锁止位置,或有遮挡物遮挡,不进行上锁,重新返回判定;如果陀螺仪检测模块内部的震动检测模块没有检测到关门的震动,以及角度检测模块内部检测门体没有处于关闭角度,则不进行上锁,重新返回判定;s5:正常判定的处理:满足上述两条判定条件时,检测模块自动将信号传输至主控模块,主控模块对接收到的信号进行分析处理;s6:门锁锁止组件的上锁:电机驱动反馈模块接收到信号,驱动门锁锁止组件进行上锁。
12.本发明的有益效果是:1、该种基于红外和陀螺仪控制的智能门锁及其上锁方法,通过红外感应模块内部设置的红外传感器一和红外传感器二感应门是否关到位,陀螺仪检测模块检测关门时的震动,双重认证确保门已关闭到位然后触发上锁逻辑从而实现安全可靠的自动上锁功能,可防止手等其他物体遮挡红外造成误触发上锁;2、该种基于红外和陀螺仪控制的智能门锁及其上锁方法,通过设置的红外感应模块可以检测门是否关到合适的位置,既可以为上锁逻辑提供支持,避免发生误上锁,也可以使上锁机制更加完善,方便进行使用;3、该种基于红外和陀螺仪控制的智能门锁及其上锁方法,通过设置的陀螺仪检测模块既可以提供双重上锁逻辑,也可以通过内部检测到的震动来自动进行上锁,方便在生活中进行使用。
附图说明
13.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1是本发明一种基于红外和陀螺仪控制的智能门锁安装示意图;图2是本发明一种基于红外和陀螺仪控制的智能门锁拆分示意图;图3是本发明一种基于红外和陀螺仪控制的智能门锁控制系统示意图;图4是本发明一种基于红外和陀螺仪控制的智能门锁上锁方法示意图。
14.图中:1、智能门锁本体;2、门体;3、前盖板;4、集成主板;401、主控模块;402、电机驱动反馈模块;403、检测模块;4031、红外感应模块;4032、陀螺仪检测模块;4033、红外传感器一;4034、红外传感器二;4035、震动检测模块;4036、角度检测模块;404、密码解锁模块;405、指纹识别模块;406、人脸识别模块;5、门锁锁止组件;6、后盖板;601、供电模块。
具体实施方式
15.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
16.实施例:如图1-图4所示,本发明一种基于红外和陀螺仪控制的智能门锁,包括智能门锁本体1,智能门锁本体1一侧通过穿钉固定连接有门体2,智能门锁本体1包括前盖板3、集成主板4、门锁锁止组件5以及后盖板6,后盖板6内部设置有供电模块601,集成主板4包括主控模块401、电机驱动反馈模块402、检测模块403、密码解锁模块404、指纹识别模块405以及人脸识别模块406,检测模块403包括红外感应模块4031和陀螺仪检测模块4032。
17.其中,前盖板3顶部设置有触控显示屏,触控显示屏与主控模块401内部信号连接,供电模块601与主控模块401电性连接,且供电模块601内部设置有电池组,通过设置的主控模块401可以对整个控制进行控制,以及通过设置的供电模块601方便为该智能门锁提供电力支持。
18.其中,集成主板4一侧与前盖板3内部一侧通过螺钉固定连接,门体2内部开设有安装孔,门锁锁止组件5设置于安装孔内部,且门锁锁止组件5一侧与前盖板3内部一个卡接,集成主板4方便集成各个元件,提高控制元件的集成度,方便进行控制及安装,门锁锁止组件5方便内部设置有锁芯等元件,方便进行上锁。
19.其中,后盖板6安装于安装孔另一侧,且后盖板6通过穿钉与前盖板3一侧固定连接,后盖板6与前盖板3可以对该智能锁进行保护,方便进行安装。
20.其中,门锁锁止组件5内部设置有用于驱动锁芯元件的微型电机,且微型电机与电机驱动反馈模块402信号连接,通过设置的电机驱动反馈模块402可以在接收到信号的情况下启动门锁锁止组件5内部设置的用于驱动锁芯元件的微型电机,驱动门锁锁止组件5内部进行上锁或解锁。
21.其中,红外感应模块4031包括红外传感器一4033和红外传感器二4034,红外传感器一4033设置于智能门锁本体1内部,红外传感器二4034与红外传感器一4033呈对称设置,红外传感器二4034通过门框固定连接,且红外传感器一4033与红外传感器二4034皆与红外感应模块4031内部信号连接,通过设置的红外感应模块4031可以检测门锁的上锁位置是否处于合适位置,避免没有进入合适位置误上锁,以及避免有遮挡物的遮挡发生误上锁。
22.其中,陀螺仪检测模块4032内部设置有用于检测震动和角度的震动检测模块4035和角度检测模块4036,通过设置的陀螺仪检测模块4032可以与红外感应模块4031配合进行使用,增加该智能门锁上锁逻辑的可靠性,避免上锁逻辑比较单一发生误上锁。
23.一种基于红外和陀螺仪控制的智能门锁上锁方法,包括如下步骤:s1:门体位置的确定,通过手推使门体进入门框内部,或使门体处于打开状态;s2:智能门锁本体进行检测判定,智能门锁内部的检测模块检测是否需要进行上锁,并进行判定;s3:判定依据:红外感应模块内部的红外传感器一与红外传感器二是否对准,并建立信号传输通路;陀螺仪检测模块内部的震动检测模块是否检测到关门的震动,以及角度检测模块内部检测是否处于门关闭角度;s4:异常判定的处理:如果红外感应模块内部的红外传感器一与红外传感器二未对准,信号传输通路不能够建立,则说明门体没有进入到锁止位置,或有遮挡物遮挡,不进
行上锁,重新返回判定;如果陀螺仪检测模块内部的震动检测模块没有检测到关门的震动,以及角度检测模块内部检测门体没有处于关闭角度,则不进行上锁,重新返回判定;s5:正常判定的处理:满足上述两条判定条件时,检测模块自动将信号传输至主控模块,主控模块对接收到的信号进行分析处理;s6:门锁锁止组件的上锁:电机驱动反馈模块接收到信号,驱动门锁锁止组件进行上锁。
24.工作原理:使用时,首先使用人员通过手推使门体2进入门框内部,或使门体2处于打开或关闭状态,智能门锁本体1内部的检测模块403检测是否需要进行上锁,并进行判定,红外感应模块4031内部的红外传感器一4033与红外传感器二4034是否对准,并建立信号传输通路;陀螺仪检测模块4032内部的震动检测模块4035是否检测到关门的震动,以及角度检测模块4036内部检测是否处于门关闭角度,如果红外感应模块4031内部的红外传感器一4033与红外传感器二4034未对准,信号传输通路不能够建立,则说明门体2没有进入到锁止位置,或有遮挡物遮挡,不进行上锁,重新返回判定;如果陀螺仪检测模块4032内部的震动检测模块4035没有检测到关门的震动,以及角度检测模块4036内部检测门体2没有处于关闭角度,则不进行上锁,重新返回判定,满足上述两条判定条件时,检测模块403自动将信号传输至主控模块401,主控模块401对接收到的信号进行分析处理,电机驱动反馈模块402接收到信号,驱动门锁锁止组件5进行上锁;在开锁时,由于该智能门锁本体1内部集成有密码解锁模块404、指纹识别模块405以及人脸识别模块406,所以使用人员即可通过密码解锁、指纹解锁以及人脸识别解锁等方式进行解锁。
25.最后应说明的是:在本发明的描述中,需要说明的是,术语“竖直”、“上”、“下”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
26.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
27.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。