技术特征:
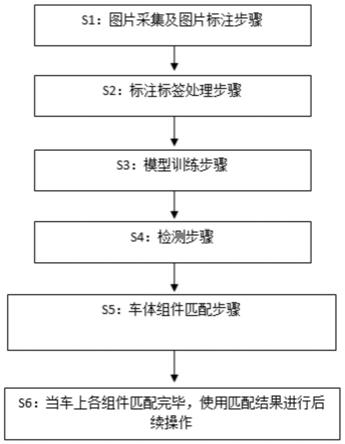
1.一种基于深度学习的车辆组件匹配方法,其特征在于,所述车辆组件匹配方法包括:s1:图片采集及图片标注步骤,完成车box和车上的组件box的位置标注,并对每个车box和车上组件box完成对应的车id标注,形成标注标签;s2:标注标签处理步骤,基于步骤s1中标注标签作出对应的检测标签,使得通过检测标签信息能够基于车id找到对应的车box和组件box;然后完成车box的中心点坐标设置,形成额外位置信息;s3:模型训练步骤,将图片、标注标签、检测标签及额外信息输入至深度卷积神经网络搭建的检测网络模型进行模型训练,模型中在分类和box分支之外再增加点回归分支,用于预测额外位置信息;s4:检测步骤,模型训练完毕后,对于需要处理的图片,使用检测器来检测图里的车box和各组件box的位置,针对每个box都预测获得有一个额外位置信息,即预测获得有车辆中心点;s5:车体组件匹配步骤,s51:将各box按照分类分数从大到小排序,对于按顺序的每个车box,根据该车box对应的额外位置信息,挑选车体其余组件,并完成组件的匹配;或者s52:计算每个车box和各组件box的各自预测中心点的距离d1或者基于计算得到距离d1计算相对于车box的大小得出的相对距离d2,从而基于d1或d2得出计算分数s,其中,计算分数s在距离d1或d2越大时取值越小,并当距离d1或d2大过某预设值时s取0;根据车box和组件box的分类分数对计算分数s做乘法,得到两两连接分数s1,不为0的各连接分数s1组成一个权值图,基于权值图中数值大小关系完成各车的组件匹配。2.如权利要求1所述的车辆组件匹配方法,其特征在于,步骤s1中,通过对每个车box和车上组件box完成对应的车id标注,使得每个车和车内组件都有同一个id。3.如权利要求1所述的车辆组件匹配方法,其特征在于,步骤s2中,车box的中心点坐标采用xy表示,也即是额外位置信息。4.如权利要求1所述的车辆组件匹配方法,其特征在于,步骤s4中,检测器需要使用到fpn。5.如权利要求3所述的车辆组件匹配方法,其特征在于,步骤s4中,每个box都预测有一个额外位置信息xy,代表车辆中心点。6.如权利要求5所述的车辆组件匹配方法,其特征在于,步骤s51中挑选车体其余组件时,基于组件box预测的车辆中心点离基于车box预测的中心点越近,组件的匹配度就越高,在全部候选组件中,根据每车对应每个组件的最大个数,挑选组件和该车匹配。7.如权利要求6所述的车辆组件匹配方法,其特征在于,当基于组件的box预测的车辆中心点离基于车box预测的中心点的距离相对车box的大小大于一定阈值时,该组件不被挑选。8.如权利要求1所述的车辆组件匹配方法,其特征在于,所述车辆组件匹配方法包括:s6:当车上各组件匹配完毕,使用匹配结果进行后续操作。9.一种外接存储介质的处理设备,其特征在于,所述设备包括:处理器,用于执行计算机程序时实现如权利要求1至8任一项所述的车辆组件匹配方法
的步骤。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至8任一项所述的车辆组件匹配方法的步骤。
技术总结
本发明公开了一种基于深度学习的车辆组件匹配方法,所述车辆组件匹配方法包括:S1:图片采集及图片标注步骤;S2:标注标签处理步骤;S3:模型训练步骤;S4:检测步骤,S5:车体组件匹配步骤,本发明的基于深度学习的车辆组件匹配方法直接使用检测模型来使每个box都额外预测一个规定的点,最后根据box预测的点来对box进行聚类来直接得到车组件的匹配结果。可以克服几种不同的传统方法的缺陷,使用模型来直接预测出车和车组件之间的关系信息,适应各种场景、鲁棒、效果好、速度快。速度快。速度快。
技术研发人员:阚欣
受保护的技术使用者:成都臻识科技发展有限公司
技术研发日:2021.12.21
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。