1.本发明涉及吊装搬运装置,特别涉及一种蘑菇头吊具抓取装置。
背景技术:
2.通用吊钩吊环等吊具,在使用时需要作业人员手动完成吊具的对接及解锁,费时费力,工作效率低,且存在安全隐患。在一些特种应用环境下,通用吊具无法满足高可靠性及高效率的工作需求。因此,急需一种安全可靠且工作效率高的吊装搬运装置。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种蘑菇头吊具抓取装置,以解决人工手动完成吊具的对接及解锁,费时费力,工作效率低,且存在安全隐患的问题。
4.为了实现上述目的,本发明采用以下技术方案:
5.一种蘑菇头吊具抓取装置,包括:壳体、锁定钩爪机构、钩爪解锁机构及蘑菇头连接件,其中蘑菇头连接件设置于被吊物上;所述锁定钩爪机构设置于壳体内,用于抓取蘑菇头连接件;所述钩爪解锁机构设置于所述壳体的外侧,用于所述锁定钩爪机构的解锁。
6.所述锁定钩爪机构包括锁定钩爪、钩爪连杆及直线导向机构,其中锁定钩爪为多个,并且沿周向铰接在所述壳体上;所述直线导向机构设置于所述锁定钩爪的上方,并且通过多个钩爪连杆分别与各锁定钩爪铰接。
7.所述直线导向机构包括导向光轴及与所述导向光轴滑动连接的连杆滑块,其中导向光轴与所述壳体连接,所述导向光轴上套设有复位弹簧,所述复位弹簧的两端分别与所述壳体和所述连杆滑块抵接;所述连杆滑块与所述钩爪连杆铰接。
8.所述壳体包括下壳体及与所述下壳体连接的上壳体;所述锁定钩爪铰接在所述下壳体上;所述导向光轴连接在所述上壳体上;
9.所述解锁机构设置于所述上壳体的外侧,并且与所述连杆滑块连接;所述解锁机构用于驱动所述连杆滑块沿轴向运动,从而拉动所述锁定钩爪解锁。
10.所述上壳体的顶部设有吊环。
11.所述解锁机构包括解锁滑动轴、解锁手柄、导向块及导向块销轴,其中解锁手柄的两端分别与两个导向块连接;所述导向块通过所述导向块销轴与所述壳体铰接;所述解锁滑动轴设置于所述连杆滑块的上端,并且两端分别与两个导向块滑动连接;转动所述解锁手柄,从而推动解锁滑动轴及所述连杆滑块向上移动。
12.所述导向块的内侧设有弧形槽,所述解锁滑动轴与所述弧形槽滑动连接。
13.所述锁定钩爪通过钩爪固定轴与所述壳体转动连接;所述钩爪连杆通过连杆销轴与所述锁定钩爪转动连接。
14.本发明的优点及有益效果是:
15.1.本发明可以实现无需人工干预的自动抓取过程,能够满足特种环境下的高速作业需求。
16.2.本发明采用的装置具有自锁功能,带负载状态无法手动解锁,保证了吊装作业的安全。
17.3.本发明采用了圆周对称的钩爪装置,能够广泛适应抓取装置与被吊装对象的相对角度。
18.4.本发明具有快速解锁的手柄,适合单手操作。
附图说明
19.图1为本发明蘑菇头吊具抓取装置的结构示意图;
20.图2为本发明蘑菇头吊具抓取装置的爆炸图。
21.图中:1为下壳体,2为上壳体,3为吊环,4为蘑菇头连接件,5为钩爪固定轴,6为限位轴套,7为锁定钩爪,8为连杆销轴,9钩爪连杆,10为连杆滑块,11为复位弹簧,12为导向光轴,13为解锁滑动轴,14为解锁手柄,15为导向块,16为导向块销轴。
具体实施方式
22.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
23.如图1所示,本发明提供的一种蘑菇头吊具抓取装置,包括:壳体、锁定钩爪机构、钩爪解锁机构及蘑菇头连接件4,其中蘑菇头连接件4设置于被吊物上;锁定钩爪机构设置于壳体内,用于抓取蘑菇头连接件4;钩爪解锁机构设置于壳体的外侧,用于锁定钩爪机构的解锁。
24.本发明的实施例中,壳体包括下壳体1及与下壳体1连接的上壳体2,上壳体2的顶部设有吊环3,便于与机械臂末端柔性连接。
25.如图2所示,本发明的实施例中,锁定钩爪机构包括锁定钩爪7、钩爪连杆9及直线导向机构,其中锁定钩爪7为多个,并且沿周向铰接在下壳体1上;直线导向机构设置于上壳体2内,并且位于锁定钩爪7的上方,直线导向机构通过多个钩爪连杆9分别与各锁定钩爪7铰接。
26.本实施例中,直线导向机构包括导向光轴12及与导向光轴12滑动连接的连杆滑块10,其中导向光轴12与上壳体2连接,导向光轴12上套设有复位弹簧11,复位弹簧11的两端分别与上壳体2和连杆滑块10抵接;连杆滑块10与各钩爪连杆9的上端铰接。
27.本发明的实施例中,解锁机构设置于上壳体2的外侧,并且与连杆滑块10连接;解锁机构用于驱动连杆滑块10沿轴向运动,从而拉动锁定钩爪7解锁。
28.如图2所示,本发明的实施例中,解锁机构包括解锁滑动轴13、解锁手柄14、导向块15及导向块销轴16,其中解锁手柄14的两端分别与两个导向块15连接;两个导向块15通过导向块销轴16与上壳体2的两侧铰接;解锁滑动轴13水平设置于连杆滑块10的上端,并且两端分别与两个导向块15滑动连接;转动解锁手柄14,从而推动解锁滑动轴13及连杆滑块10向上移动。
29.具体地,导向块15的内侧设有弧形槽,解锁滑动轴13与弧形槽滑动连接。导向块15转动时,通过弧形槽推动解锁滑动轴13向上运动。
30.进一步地,锁定钩爪7的后端通过钩爪固定轴5与下壳体1转动连接;钩爪连杆9的
下端通过连杆销轴8与锁定钩爪7转动连接。
31.本实施例中,下壳体1上装有三组钩爪固定轴5,各钩爪固定轴5上装有一个锁定钩爪7,并通过限位轴套6限制其轴向位置。上壳体2内部设有三根导向光轴12,各导向光轴12上套有复位弹簧11,三根导向光轴12穿过连杆滑块10,解锁滑动轴13穿过连杆滑块10并与连杆滑块10固接,解锁滑动轴13的两端插入导向块15的弧形槽内。
32.本发明的工作原理是:
33.吊装开始前,本发明提供的一种蘑菇头吊具抓取装置处于初始状态,如图1所示。
34.对接阶段,蘑菇头吊具抓取装置随机械臂末端向下运动,直到吊装对象顶部的蘑菇头连接件4与锁定钩爪7接触。蘑菇头连接件4将锁定钩爪7向上压入,此时钩爪连杆9随锁定钩爪7向上运动,带动连杆滑块10在导向光轴12上向上滑动,此时解锁手柄14不发生运动。当蘑菇头连接件4到位以后,锁定钩爪7、钩爪连杆9及连杆滑块10在复位弹簧11的作用下快速复位到初始状态。蘑菇头吊具抓取装置和被吊装对象完成对接,开始吊装转运过程。
35.吊装转运过程中,蘑菇头连接件4的头部压住锁定钩爪7,负载使连杆滑块10贴紧下壳体1的顶部,此时无法通过拉动解锁手柄14实现解锁。
36.完成转运过程,将被吊装对象放下以后,锁定钩爪7不再承受蘑菇头连接件4传递的负载重力,继续向下释放抓取装置,直到蘑菇头连接件4与锁定钩爪7分离,此时拉起解锁手柄14,解锁手柄14会带动导向块15旋转,导向块15内侧的弧形槽推动解锁滑动轴13向上运动,带动连杆滑块10、钩爪连杆9及锁定钩爪7向上运动。保持此状态继续向上升起所述抓取装置,直到蘑菇头连接件4与所述抓取装置分离后松开解锁手柄14,所述抓取装置恢复初始状态。
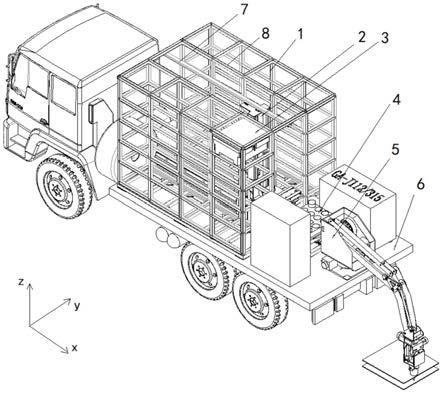
37.本发明提供了一种自适应万向抓取装置,该装置安装于车载自动化吊装机械臂末端,能够实现半自动高效率卸货,即吊具通过自动化控制与被吊装对象对接,随后由机械臂完成吊装转运动作,吊装对象到位以后,地面的操作人员拉动本装置的解锁手柄使其与被吊装对象分离,实现高效率卸货。
38.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。