1.本发明实施例涉及通信领域,特别涉及一种自动驾驶系统、方法及电动方向盘。
背景技术:
2.随着全球导航卫星系统(global navigation satellite system,gnss)技术快速发展,特别是北斗三代卫星导航定位的全球组网成功,依靠卫星定位技术实现农机、工程机械等自动驾驶的技术也得了到广泛的应用。
3.目前,在农机、工程机械等领域的自动驾驶系统主要包括:触控显示屏、北斗信号接收机以及电动方向盘;其中,触控显示屏安装在车辆驾驶室中,并且分别与北斗信号接收机以及电动方向盘通过有线方式进行通信连接;北斗信号接收机安装在外侧车顶部。
4.当需要进行自动驾驶时,触控显示屏接收用户输入的自动驾驶相关信息,包括:起始位置坐标、作业车辆参数、北斗卫星信号参数以及通用无线分组业务(general packet radio service,gprs)信号参数等,根据自动驾驶相关信息规划作业路线,并将作业路线发送给北斗信号接收机;北斗信号接收机收北斗卫星无线信号和gprs差分无线信号,并根据作业路线控制电动方向盘调整角度,通过电动方向盘驱动作业车辆转向轮,实现自动驾驶。
5.然而,目前的自动驾驶系统中,自动驾驶相关信息需要通过触控显示屏获取,由于触控显示屏是外接设备,并且需要与北斗信号接收机以及电动方向盘通过有线方式进行通信连接,势必造成安装、调试复杂的问题。
技术实现要素:
6.本发明实施方式的目的在于提供一种安装、调试简单的自动驾驶系统、方法及电动方向盘。
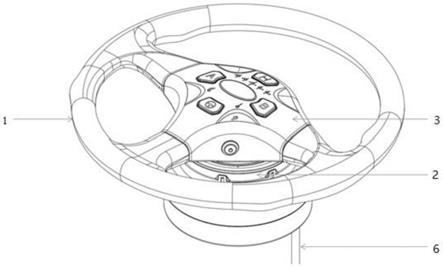
7.为解决上述技术问题,本发明的实施方式提供了一种电动方向盘,方向盘(1)以及与所述方向盘(1)相连的转动装置(2),其特征在于,所述电动方向盘还包括:用于接收第一自动驾驶相关参数的控制面板(3)、用于接收第二自动驾驶相关参数的无线通信模块(4)、用于进行路径规划的处理器(5)以及通信电缆(6);所述处理器(5)的输入端分别与所述控制面板(3)和所述无线通信模块(4)相连,所述处理器(5)的输出端与所述通信电缆(6)相连;所述控制面板(3)设置在所述方向盘(1)表面上;所述无线通信模块(4)和所述处理器(5)设置在所述方向盘(1)内部;所述通信电缆(6)从所述方向盘底部接出。
8.本发明的实施方式还提供了一种自动驾驶系统,包括:用于发送第二自动驾驶相关参数的移动终端、定位信号接收机以及以上所述的电动方向盘;所述移动终端通过无线通信方式与所述电动方向盘相连;所述电动方向盘通过有线通信的方式与所述定位信号接收机相连。
9.本发明的实施方式还提供了一种自动驾驶方法,应用在以上所述的电动方向盘上,所述自动驾驶方法包括:从所述电动方向盘的控制面板接收第一自动驾驶相关参数;通过无线通信方式接收移动终端发送的第二自动驾驶相关参数;根据所述第一自动驾驶相关
参数和所述第二自动驾驶相关参数,进行路径规划,生成自动驾驶路线;将所述自动驾驶路线发送给定位信号接收机;接收所述定位信号接收机根据接收到的定位信号以及所述自动驾驶路线生成的自动驾驶控制指令;根据所述自动驾驶控制指令控制作业车辆进行自动驾驶。
10.本发明实施方式相对于现有技术而言,电动方向盘可以通过控制面板获取第一自动驾驶相关参数,通过无线通信模块获取第二自动驾驶相关信息,无需在作业车辆中后装如触控显示屏之类的外接硬件设备即可获取自动驾驶所需的相关信息,解决了现有技术需要安装外界硬件才能获取自动驾驶所需的相关信息,导致安装复杂的问题;并且,由于电动方向盘内设有处理器,处理器可以根据第一自动导航相关参数和第二自动导航相关参数进行路径规划计算,获取自动导航路线,使得本发明实施方式提供的技术方案只需要调试电动方向盘即可,调试简单易于实现。
11.另外,本发明实施方式提供的电动方向盘,所述控制面板(3)包括按键区;所述按键区包括:电源开关键(30)和自动驾驶启/停键(31)。本发明实施方式提供的电动方向盘可以通过自动驾驶启/停键一键开启/关闭自动驾驶,操作简单。
12.另外,本发明实施方式提供的电动方向盘,所述按键区还包括:起始位置设置键(32)和终止位置设置键(33)。本发明实施方式提供的电动方向盘可以设置起始位置和终止位置,无需借助其他软件或者硬件即可完成操作,操作简单易于实现。
13.另外,本发明实施方式提供的电动方向盘,所述按键区还包括:一键对齐键(34)。本发明实施方式提供的电动方向盘可以通过一键对齐键自动完成起始位置和终止位置的设置,使得设置操作更简单便捷。
14.另外,本发明实施方式提供的电动方向盘,所述控制面板(3)还包括自动驾驶状态显示区(35)。本发明实施方式提供的电动方向盘可以通过显示区35显示自动驾驶状态信息,可以更直观地提醒驾驶员自动驾驶状态,快速显示问题,进而辅助自动驾驶更顺利地完成。
15.另外,本发明实施方式提供的电动方向盘,所述自动驾驶状态显示区(35)包括以下任意一种或组合:作业精度显示光靶、卫星定位状态灯、作业状态灯以及按键灯。
16.另外,本发明实施方式提供的电动方向盘,所述通信电缆(6)的一端与所述自动驾驶系统的定位信号接收机相连,另一端通过can总线与作业车辆的控制器及电机相连。
17.另外,本发明实施方式提供的自动驾驶方法,所述第二自动驾驶相关参数通过所述移动终端上安装的自动导航设置软件获取。通过在移动终端上安装软件可以为用户提供与自动驾驶相关的更多功能,并且,用户可以通过可视化界面更方便的输入自动驾驶所需的第二自动驾驶相关参数,使得用户操作更简单方便。
附图说明
18.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
19.图1是本发明的第一实施方式提供的电动方向盘结构示意图一;
20.图2是本发明的第一实施方式提供的电动方向盘结构示意图二;
21.图3是图1所示的本发明的第一实施方式提供的电动方向盘的控制面板的结构示意图;
22.图4是本发明的第二实施方式提供的自动驾驶系统的结构示意图;
23.图5是本发明的第二实施方式提供的自动驾驶方法的流程图。
具体实施方式
24.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本发明各实施方式中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术所要求保护的技术方案。以下各个实施例的划分是为了描述方便,不应对本发明的具体实现方式构成任何限定,各个实施例在不矛盾的前提下可以相互结合相互引用。
25.如图1和2所示,本发明的第一实施方式涉及一种电动方向盘,应用在自动驾驶系统中,包括:方向盘1以及与方向盘1相连的转动装置2,电动方向盘还包括:用于接收第一自动驾驶相关参数的控制面板3、用于接收第二自动驾驶相关参数的无线通信模块4、用于进行路径规划的处理器5以及通信电缆6;处理器5的输入端分别与控制面板3和无线通信模块4相连,处理器5的输出端与通信电缆6相连;控制面板3设置在方向盘1表面上;无线通信模块4和处理器5设置在方向盘1内部;通信电缆6从方向盘底部接出。
26.在本实施方式中,无线通信模块4用于连接移动终端,从移动终端获取第二自动驾驶相关参数,其中,移动终端可以包括手机、电脑、pad等电子设备。本实施方式不对无线通信模块4的具体类型进行限定,在实际的使用过程中,无线通信模块4可以是蓝牙模块,此时,无线通信模块4通过蓝牙匹配的方式与移动终端建立连接;无线通信模块4也可以是3g/4g/5g等移动互联网模块,电动方向盘预先设有唯一的身份标识,此时,无线通信模块4可以使用身份标识与移动终端建立连接。当然,无线通信模块4还可以为其他任意一种可以进行无线通信的网络模块,此处不对每种情况进行一一赘述。
27.在本实施方式中,控制面板3用于接收第一自动驾驶相关参数,如图3所示,控制面板3具体可以包括按键区,其中,按键区可以包括电源开关键30和自动驾驶启/停键31。电源开关键30可以控制电动方向盘开启和关闭,自动驾驶启/停键31可以控制开启和关闭自动驾驶,通过按键的方式可以一键式的启动和关闭自动驾驶,使得自动驾驶操作更加简单、方便、快捷。
28.进一步地,如图3所示,按键区还包括:起始位置设置键32和终止位置设置键33。起始位置设置键32用于设置自动驾驶的起始点位置,终止位置设置键33用于设置自动驾驶的终止点位置。需要说明的是,本实施方式不对起始位置设置键32和终止位置设置键33的具体操作指令进行限定,在实际的使用过程中,可以通过长按3s进入按键设置模式,例如:长按3s起始位置设置键32进入对起始位置的设置模式,然后短按起始位置设置键32和终止位置设置键33进行位置调节,例如:短按终止位置设置键33表示按照预先设置的调节间距向右调整起始位置。当然,以上仅为具体的举例说明,并不能对本实施例构成限定,在实际的使用过程中可以根据自动驾驶的需求设置操作指令,此处不对每种情况进行一一赘述。通过设置起始位置设置键32和终止位置设置键33,可以使用户在电动方向盘上完成起始位置
和终止位置的设置操作,无需借助其他设备,节省了硬件资源,由于按键功能明确,使得操作更加简单、便捷。
29.进一步地,如图3所示,按键区还包括:一键对齐键34。在本实施方式中,一键对齐键34主要功能是快速按照作业边界信息设置自动驾驶的起始位置和终止位置,其中,作业边界信息可以是通过无线通信模块4从移动终端获取的,也可以是预先设置的,还可以是通过其他方式获取的,此处不做赘述。通过在控制面板3上设置一键对齐键34可以进一步简化设置操作,提高用户使用自动驾驶功能的满意度。
30.需要说明的是,以上如图3所示的电源开关键30、自动驾驶启/停键31、起始位置设置键32、终止位置设置键33以及一键对齐键34仅为本实施方式获取第一自动驾驶相关参数对应的按键的具体举例,在实际的使用过程中,可以根据自动驾驶车辆所属领域的作业需求合理设置按键区的功能按键,此处不做赘述。另外,本实施方式不对按键区中各按键的具体位置布局进行限定,如图3所示的布局仅为具体的举例说明,本实施方式的按键布局原则为保证安全的前提下便于操作,在实际的使用过程中还可以根据该按键布局原则设置成其他布局样式,此处不做赘述。
31.在本实施方式中第一自动驾驶相关参数是通过控制面板3上的按键区中各按键输入的,在实际的使用过程中,也可以设置触控区替换按键区,通过触控区的触控面板输入第一自动驾驶相关参数,此处不做赘述。
32.进一步地,如图3所示,控制面板3还可以包括自动驾驶状态显示区35。在本实施方式中,自动驾驶状态显示区35用于显示自动驾驶相关的状态信息,具体地,自动驾驶状态显示区35可以包括以下任意一种或组合:作业精度显示光靶、卫星定位状态灯、作业状态灯以及按键灯等。具体显示的内容可以根据实际需要设置,以上仅为举例说明。通过显示区显示自动驾驶状态信息,可以更直观地提醒驾驶员自动驾驶状态,快速显示问题,进而辅助自动驾驶更顺利地完成。
33.进一步地,在本实施方式中,控制面板3和方向盘1之间是可拆卸的连接设计,在实际的使用过程中,如控制面板硬件更新,或者根据作业车辆的应用领域进行功能面板定制时,可以通过拆卸的方式将功能面板3与方向盘1分离,只更换功能面板3即可,无需更换整个电动方向盘,该设计使得电动方向盘的适用性更强。
34.另外,在本实施方式中,通信电缆6从方向盘底部接出的部分一端与自动驾驶系统的定位信号接收机相连,用于与定位信号接收机进行通信;另一端通过can总线与作业车辆的控制器及电机相连,通过can总线与作业车辆进行通信,实现对作业车辆的控制操作。
35.本发明实施方式相对于现有技术而言,电动方向盘可以通过控制面板获取第一自动驾驶相关参数,通过无线通信模块获取第二自动驾驶相关信息,无需在作业车辆中后装如触控显示屏之类的外接硬件设备即可获取自动驾驶所需的相关信息,解决了现有技术需要安装外界硬件才能获取自动驾驶所需的相关信息,导致安装复杂的问题;并且,由于电动方向盘内设有处理器,处理器可以根据第一自动导航相关参数和第二自动导航相关参数进行路径规划计算,获取自动导航路线,使得本发明实施方式提供的技术方案只需要调试电动方向盘即可,调试简单易于实现。
36.如图4所示,本发明的第二实施方式涉及一种自动驾驶系统,包括:用于发送第二自动驾驶相关参数的移动终端401、定位信号接收机403以及以上本发明的第一实施方式提
供的电动方向盘402;移动终端401通过无线通信方式与电动方向盘402相连;电动方向盘402通过有线通信的方式与定位信号接收机403相连。
37.需要说明的是,本实施方式不对移动终端的具体类型进行限定,移动终端可以包括手机、电脑、pad等电子设备,此处不做一一赘述。
38.在本实施方式中,定位信号接收机403具体可以为北斗信号接收机。
39.本发明实施方式相对于现有技术而言,电动方向盘可以通过控制面板获取第一自动驾驶相关参数,通过无线通信模块获取第二自动驾驶相关信息,无需在作业车辆中后装如触控显示屏之类的外接硬件设备即可获取自动驾驶所需的相关信息,解决了现有技术需要安装外界硬件才能获取自动驾驶所需的相关信息,导致安装复杂的问题;并且,由于电动方向盘内设有处理器,处理器可以根据第一自动导航相关参数和第二自动导航相关参数进行路径规划计算,获取自动导航路线,使得本发明实施方式提供的技术方案只需要调试电动方向盘即可,调试简单易于实现。
40.如图5所示,本发明的第三实施方式涉及一种自动驾驶方法,应用在本发明的第一实施方式提供的电动方向盘上,自动驾驶方法包括:
41.步骤501,从电动方向盘的控制面板接收第一自动驾驶相关参数。
42.在本实施方式中,第一自动驾驶相关参数可以包括:自动驾驶开启/关闭信息以及自动导航的起始位置信息和终止位置信息等。
43.步骤502,通过无线通信方式接收移动终端发送的第二自动驾驶相关参数。
44.在本实施方式中,第二自动驾驶相关参数可以包括:作业车辆的物理参数、北斗卫星信号参数以及gprs信号参数等。第二自动驾驶相关参数具体通过移动终端上安装的自动导航设置软件获取。
45.步骤503,根据第一自动驾驶相关参数和第二自动驾驶相关参数,进行路径规划,生成自动驾驶路线。
46.步骤504,将自动驾驶路线发送给定位信号接收机。
47.步骤505,接收定位信号接收机根据接收到的定位信号以及自动驾驶路线生成的自动驾驶控制指令。
48.步骤506,根据自动驾驶控制指令控制作业车辆进行自动驾驶。
49.本发明实施方式相对于现有技术而言,电动方向盘可以通过控制面板获取第一自动驾驶相关参数,通过无线通信模块获取第二自动驾驶相关信息,无需在作业车辆中后装如触控显示屏之类的外接硬件设备即可获取自动驾驶所需的相关信息,解决了现有技术需要安装外界硬件才能获取自动驾驶所需的相关信息,导致安装复杂的问题;并且,由于电动方向盘内设有处理器,处理器可以根据第一自动导航相关参数和第二自动导航相关参数进行路径规划计算,获取自动导航路线,使得本发明实施方式提供的技术方案只需要调试电动方向盘即可,调试简单易于实现。
50.本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。