1.本实用新型涉及船舶清洗磁力爬壁机器人领域,尤其涉及一种用于船舶清洗磁力爬壁机器人的复合式主动轮结构。
背景技术:
2.在船舶清洗作业中,由于人员和常规设备难以到达船舶的侧面等位置,因此多采用磁力爬壁装备,即能够沿着船舶的侧面攀爬行走的磁力爬壁机器人。现有的吸盘式船舶清洗磁力爬壁机器人包括一个车体框架,车体框架上安装有电控盒、抽吸式清洗盘、从动轮模块和两个主动轮模块,抽吸式清洗盘位于车体框架的底部,两个主动轮模块分别位于抽吸式清洗盘的两侧,主动轮模块和从动轮模块上都设有磁铁,通过磁铁产生的磁吸附力使机器人能够吸附在船舶的侧面进行运动,抽吸式清洗盘对机器人运动的位置进行真空抽吸清洗。
3.现有的主动轮模块上安装有两个主动轮,即一个吸盘式船舶清洗磁力爬壁机器人共具有四个主动轮,而四个主动轮全部为充气轮或者全部为挂胶轮,充气轮的优点为在受到磁吸附力作用时的受压变形量较大,即充气轮会部分被压扁在船舶侧壁,使充气轮与船舶侧壁的接触面较大,缺点为变形较大也使得充气轮对车体框架的支撑效果较差,导致机器人整体的刚性不足,对湿滑表面的适应性较差;挂胶轮的优缺点与充气轮正相反,挂胶轮为实心结构,在受到磁吸附力作用时的受压变形量较小,依然会保持与船舶侧壁较小的接触面积,对车体框架的支撑效果较好,但由于与船舶侧壁的接触面积较小,导致挂胶轮对船舶侧壁凹凸不平的曲面适应性较差。而现有的船舶清洗磁力爬壁机器人全部采用充气轮或者挂胶轮,限制了机器人的应用环境。
技术实现要素:
4.为解决现有的船舶清洗磁力爬壁机器人全部采用充气轮或者挂胶轮,限制应用环境的问题,本实用新型提供了一种用于船舶清洗磁力爬壁机器人的复合式主动轮结构。
5.本实用新型为解决上述技术问题所采用的技术方案是:一种用于船舶清洗磁力爬壁机器人的复合式主动轮结构,所述船舶清洗磁力爬壁机器人包括一个车体框架,车体框架上安装有电控盒、抽吸式清洗盘、从动轮模块和两个主动轮模块,抽吸式清洗盘位于车体框架的底部,两个主动轮模块分别位于抽吸式清洗盘的两侧,所述主动轮模块包括一个壳体,壳体上安装有两个主动轮、用于带动主动轮转动的动力传动组件、以及用于和主动轮所行驶的工作面之间产生磁吸附力的主动轮磁铁,其中一个主动轮位于主动轮磁铁靠近抽吸式清洗盘的一侧,另一个主动轮位于主动轮磁铁远离抽吸式清洗盘的一侧,所述复合式主动轮结构包括充气轮和挂胶轮,两个主动轮模块的四个主动轮由充气轮和挂胶轮搭配组成,在受到主动轮磁铁的磁吸附力作用时,充气轮的受压变形量大于挂胶轮的受压变形量。
6.优选的,两个主动轮模块上靠近抽吸式清洗盘的一侧均安装为挂胶轮,远离抽吸式清洗盘的一侧均安装为充气轮。
7.优选的,两个主动轮模块上靠近抽吸式清洗盘的一侧均安装为充气轮,远离抽吸式清洗盘的一侧均安装为挂胶轮。
8.优选的,其中一个主动轮模块上安装为挂胶轮,另一个主动轮模块上安装为充气轮。
9.根据上述技术方案,本实用新型的有益效果是:
10.本实用新型中配合使用充气轮和挂胶轮,使得船舶清洗磁力爬壁机器人能够同时具有充气轮和挂胶轮的优点,既能够保证主动轮与船舶侧壁的接触面积,也可以保证主动轮对车体框架的支撑效果。根据不同的工况。本实用新型能够灵活设置充气轮和挂胶轮的搭配方式,可以将外侧的两个主动轮全部设为挂胶轮,内侧的两个主动轮全部设为充气轮,也可以反过来将外侧的两个主动轮全部设为充气轮,内侧的两个主动轮全部设为挂胶轮,都可以同时提升机器人的支撑性和的摩擦力,兼顾了对湿滑表面和凹凸曲面的适应性;还可以将一个主动轮模块安装挂胶轮,另一个主动轮模块安装充气轮,当机器人在船舶侧壁上横向运动时,可以通过下方的两个挂胶轮对机器人进行支撑,并通过上方的两个充气轮提升摩擦力,使得船舶清洗磁力爬壁机器人能够适应多种不同的船舶环境。
附图说明
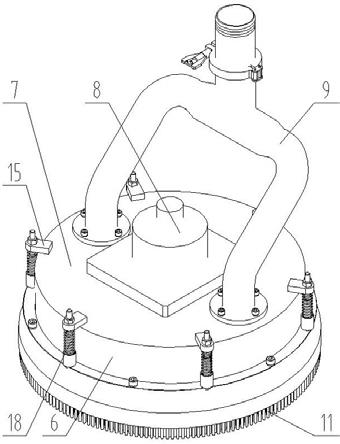
11.图1为实施例一的示意图;
12.图2为实施例二的示意图;
13.图3为实施例三的示意图。
14.图中标记:1、车体框架,2、电控盒,3、抽吸式清洗盘,4、从动轮模块,5、主动轮模块,6、壳体,7、主动轮磁铁,8、充气轮,9、挂胶轮。
具体实施方式
15.参见附图,具体实施方式如下:
16.一种用于船舶清洗磁力爬壁机器人的复合式主动轮结构,船舶清洗磁力爬壁机器人包括一个车体框架1,车体框架1上安装有电控盒2、抽吸式清洗盘3、从动轮模块4和两个主动轮模块5,抽吸式清洗盘3位于车体框架1的底部,两个主动轮模块5分别位于抽吸式清洗盘3的两侧。
17.主动轮模块5包括一个壳体6,壳体6上安装有两个主动轮、用于带动主动轮转动的动力传动组件、以及用于和主动轮所行驶的工作面之间产生磁吸附力的主动轮磁铁7,其中一个主动轮位于主动轮磁铁7靠近抽吸式清洗盘3的一侧,另一个主动轮位于主动轮磁铁7远离抽吸式清洗盘3的一侧。
18.本实用新型的复合式主动轮结构包括充气轮8和挂胶轮9,两个主动轮模块5的四个主动轮由充气轮8和挂胶轮9搭配组成,在受到主动轮磁铁7的磁吸附力作用时,充气轮8的受压变形量大于挂胶轮9的受压变形量。
19.实施例一:两个主动轮模块5上靠近抽吸式清洗盘3的一侧均安装为挂胶轮9,远离抽吸式清洗盘3的一侧均安装为充气轮8。该结构提升了机器人内侧的支撑性和外侧的摩擦力,兼顾了对湿滑表面和凹凸曲面的适应性。
20.实施例二:两个主动轮模块5上靠近抽吸式清洗盘3的一侧均安装为充气轮8,远离
抽吸式清洗盘3的一侧均安装为挂胶轮9。该结构提升了机器人外侧的支撑性和内侧的摩擦力,兼顾了对湿滑表面和凹凸曲面的适应性。
21.实施例三:其中一个主动轮模块5上安装为挂胶轮9,另一个主动轮模块5上安装为充气轮8。该结构通常用于机器人在船舶侧壁上横向运动,通常将挂胶轮9设置在机器人朝下一侧,而充气轮8设置在朝上一侧,下方的两个挂胶轮9能够充分的对机器人进行支撑,避免机器人横向运动时下方的两个主动轮受压过度而支撑不足的情况,而上方的两个充气轮8提升了摩擦力,避免机器人横向运动时摩擦力不足的情况。
技术特征:
1.一种用于船舶清洗磁力爬壁机器人的复合式主动轮结构,所述船舶清洗磁力爬壁机器人包括一个车体框架(1),车体框架(1)上安装有电控盒(2)、抽吸式清洗盘(3)、从动轮模块(4)和两个主动轮模块(5),抽吸式清洗盘(3)位于车体框架(1)的底部,两个主动轮模块(5)分别位于抽吸式清洗盘(3)的两侧,所述主动轮模块(5)包括一个壳体(6),壳体(6)上安装有两个主动轮、用于带动主动轮转动的动力传动组件、以及用于和主动轮所行驶的工作面之间产生磁吸附力的主动轮磁铁(7),其中一个主动轮位于主动轮磁铁(7)靠近抽吸式清洗盘(3)的一侧,另一个主动轮位于主动轮磁铁(7)远离抽吸式清洗盘(3)的一侧,其特征在于:所述复合式主动轮结构包括充气轮(8)和挂胶轮(9),两个主动轮模块(5)的四个主动轮由充气轮(8)和挂胶轮(9)搭配组成,在受到主动轮磁铁(7)的磁吸附力作用时,充气轮(8)的受压变形量大于挂胶轮(9)的受压变形量。2.根据权利要求1所述的一种用于船舶清洗磁力爬壁机器人的复合式主动轮结构,其特征在于:两个主动轮模块(5)上靠近抽吸式清洗盘(3)的一侧均安装为挂胶轮(9),远离抽吸式清洗盘(3)的一侧均安装为充气轮(8)。3.根据权利要求1所述的一种用于船舶清洗磁力爬壁机器人的复合式主动轮结构,其特征在于:两个主动轮模块(5)上靠近抽吸式清洗盘(3)的一侧均安装为充气轮(8),远离抽吸式清洗盘(3)的一侧均安装为挂胶轮(9)。4.根据权利要求1所述的一种用于船舶清洗磁力爬壁机器人的复合式主动轮结构,其特征在于:其中一个主动轮模块(5)上安装为挂胶轮(9),另一个主动轮模块(5)上安装为充气轮(8)。
技术总结
一种用于船舶清洗磁力爬壁机器人的复合式主动轮结构,船舶清洗磁力爬壁机器人包括车体框架,车体框架上安装有电控盒、抽吸式清洗盘、从动轮模块和两个主动轮模块,两个主动轮模块分别位于抽吸式清洗盘的两侧,主动轮模块包括壳体,壳体上安装有两个主动轮和主动轮磁铁,其中一个主动轮位于主动轮磁铁靠近抽吸式清洗盘的一侧,另一个主动轮位于主动轮磁铁远离抽吸式清洗盘的一侧,两个主动轮模块的四个主动轮由充气轮和挂胶轮搭配组成,使得船舶清洗磁力爬壁机器人能够同时具有充气轮和挂胶轮的优点,既能够保证主动轮与船舶侧壁的接触面积,也可以保证主动轮对车体框架的支撑效果,使得船舶清洗磁力爬壁机器人能够适应多种不同的船舶环境。不同的船舶环境。不同的船舶环境。
技术研发人员:阮鑫 邵琳 阮佳琪 乔金锋 耿玲 郭冬冬 孙浩 李永军 姚瑞 林世峰 田利红 聂建香 梁存
受保护的技术使用者:中信重工机械股份有限公司
技术研发日:2021.10.20
技术公布日:2022/5/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。