1.本实用新型涉及工业机器人技术领域,具体为一种视觉识别的工业机器人。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
3.现有技术中的视觉识别的工业机器人多使用不灵活,多角度转动不灵活,且不易拆卸维修,使用不方便,为此,我们提出一种视觉识别的工业机器人,转动灵活,便于拆卸,使用方便。
技术实现要素:
4.本实用新型要解决的技术问题是克服现有的缺陷,提供一种视觉识别的工业机器人,转动灵活,便于拆卸,使用方便,可以有效解决背景技术中的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种视觉识别的工业机器人,包括固定架、转动单元和调节单元;
6.固定架:为u型架,固定架的底侧设有转动单元;
7.调节单元:包含动力组件一,转杆、传动板、丝杠、固定框和视觉识别主体,所述固定框有两个,所述固定框为u型,所述固定框的背侧通过转杆与对应的固定架内侧转动连接,左端的固定框底侧设有传动板,所述丝杠的右端通过传动杆与传动板的左侧活动连接,且丝杠与固定架右端上的螺孔螺纹连接。通过转动丝杠,使其与固定架的右端进行螺纹运动,控制左端的固定框移动,配合另一个固定框对视觉识别主体进行固定,然后通过动力组件一控制左端的转杆转动,从而控制固定框带动视觉识别主体进行上下角度调节。
8.进一步的,所述动力组件一包含固定板和电机二,所述丝杠的左端与固定板的右侧转动连接,所述电机二通过电机架固定在固定板的左侧,且左端的转杆的左端延伸至传动板的左侧与电机二的输出轴连接,电机二的输入端通过外部控制开关组与外部电源的输出端电连接。通过电机二控制左端的转杆转动,从而控制固定框带动视觉识别主体进行上下角度调节。
9.进一步的,所述转动单元包含动力组件二、支撑杆、齿轮一和底板,所述固定架的底侧通过支撑杆与底板的上侧转动连接,所述支撑杆的下端外侧套接有齿轮一。通过动力组件二控制齿轮一转动,使支撑杆转动,从而带动固定架上的识别主体三百六十度转动。
10.进一步的,所述动力组件二包含电机一和齿轮二,所述电机一通过电机架固定在底板的上侧,所述电机一的输出轴连接齿轮二的中心位置,所述齿轮二与齿轮一啮合连接。通过电机一带动齿轮二转动,使齿轮二与齿轮一啮合运动,支撑杆转动,从而带动固定架上的识别主体三百六十度转动。
11.进一步的,还包括扭环,所述丝杠的右端外侧套接有扭环。通过扭环可以方便扭动
丝杠转动。
12.进一步的,还包括保护垫,所述固定框的内侧嵌有保护垫。保护垫防止固定框将视觉识别主体夹伤。
13.与现有技术相比,本实用新型的有益效果是:本工业机器人,具有以下好处:
14.1、通过转动丝杠,使其与固定架的右端进行螺纹运动,控制左端的固定框移动,配合另一个固定框对视觉识别主体进行固定,方便其固定安装,便于后期维修。
15.2、通过动力组件一控制左端的转杆转动,从而控制固定框带动视觉识别主体进行上下角度调节。
16.3、通过动力组件二控制齿轮一转动,使支撑杆转动,从而带动固定架上的识别主体三百六十度转动。
附图说明
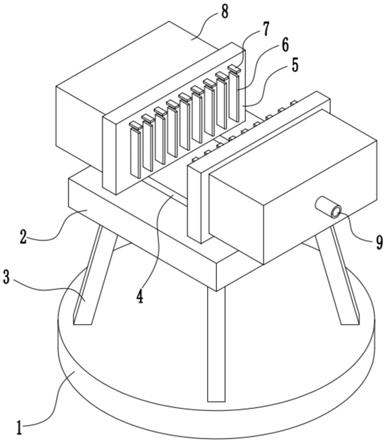
17.图1为本实用新型侧视结构示意图。
18.图中:1固定架、2转动单元、21支撑杆、22齿轮一、23底板、24电机一、25齿轮二、3调节单元、31转杆、32传动板、33丝杠、34固定框、35视觉识别主体、36固定板、37电机二、4扭环、5保护垫。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1-1,本实施例提供一种技术方案:一种视觉识别的工业机器人,包括固定架1、转动单元2和调节单元3;
21.固定架1:为u型架,固定架1的底侧设有转动单元2;
22.调节单元3:包含动力组件一,转杆31、传动板32、丝杠33、固定框34和视觉识别主体35,固定框34有两个,固定框34为u型,固定框34的背侧通过转杆31与对应的固定架1内侧转动连接,左端的固定框34底侧设有传动板32,丝杠33的右端通过传动杆与传动板32的左侧活动连接,且丝杠33与固定架1右端上的螺孔螺纹连接。通过转动丝杠33,使其与固定架1的右端进行螺纹运动,控制左端的固定框34移动,配合另一个固定框34对视觉识别主体35进行固定,然后通过动力组件一控制左端的转杆31转动,从而控制固定框34带动视觉识别主体35进行上下角度调节。
23.动力组件一包含固定板36和电机二37,丝杠33的左端与固定板36的右侧转动连接,电机二37通过电机架固定在固定板36的左侧,且左端的转杆31的左端延伸至传动板32的左侧与电机二37的输出轴连接,电机二37的输入端通过外部控制开关组与外部电源的输出端电连接。通过电机二37控制左端的转杆31转动,从而控制固定框34带动视觉识别主体35进行上下角度调节。
24.转动单元2包含动力组件二、支撑杆21、齿轮一22和底板23,固定架1的底侧通过支撑杆21与底板23的上侧转动连接,支撑杆21的下端外侧套接有齿轮一22。通过动力组件二
控制齿轮一22转动,使支撑杆21转动,从而带动固定架1上的识别主体35三百六十度转动。
25.动力组件二包含电机一24和齿轮二25,电机一24通过电机架固定在底板23的上侧,电机一24的输出轴连接齿轮二25的中心位置,齿轮二25与齿轮一22啮合连接。通过电机一24带动齿轮二25转动,使齿轮二25与齿轮一22啮合运动,支撑杆21转动,从而带动固定架1上的识别主体35三百六十度转动。
26.还包括扭环4,丝杠33的右端外侧套接有扭环4。通过扭环4可以方便扭动丝杠33转动。
27.还包括保护垫5,固定框34的内侧嵌有保护垫5。保护垫5防止固定框34将视觉识别主体35夹伤。
28.本实用新型提供的一种视觉识别的工业机器人的工作原理如下:工作人员通过扭动扭环4,转动丝杠33,使其与固定架1的右端进行螺纹运动,控制左端的固定框34移动,配合另一个固定框34,对视觉识别主体35进行固定,方便其固定安装,便于后期维修,可以通过电机二37控制左端的转杆31转动,从而控制固定框34带动视觉识别主体35进行上下角度调节,可以通过电机一24带动齿轮二25转动,使齿轮二25与齿轮一22啮合运动,支撑杆21转动,从而带动固定架1上的识别主体35三百六十度转动。
29.值得注意的是,以上实施例中所公开电机二37和电机一24的型号为hb556,控制开关组控制电机二37和电机一24工作采用现有技术中常用的方法。
30.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。