1.本实用新型属于教学设备领域,涉及一种机器人模块化教学应用实训平台。
背景技术:
2.机器人实训平台是一种既能胜任机电类专业教学实验,又能进行机电方面技能演示以及培训的教学设备。现有的工业机器人实训平台包含工业机器人、智能视觉系统、rfid数据系统、plc控制系统及机构,可以实现对高速传输的工件进行分拣、检测、搬运等操作。但目前机器人实训平台还是基于传统的功能结构,其模块功能单一,教学应用的广泛性差,使学生的学习能力无法得到进一步的拓展。
技术实现要素:
3.本实用新型的目的是针对现有技术中存在的上述问题,提供了一种设计完善,促进学生学习能力的机器人模块化教学应用实训平台。
4.本实用新型的目的可通过下列技术方案来实现:一种机器人模块化教学应用实训平台,包括机器人和实训柜体,其特征在于,所述的机器人位于实训柜体外,所述的实训柜体顶部可拆卸的安装有若干个功能模块,所述的实训柜体顶部还可拆卸的安装有功能集成模块,所述的功能集成模块由模块底座、推拉式作业模块和侧开式功能模块组成,所述的模块底座底部的四边角处设有能与实训柜体顶部相连的连接座,所述的模块底座顶部设有集成功能控制板。
5.在上述的一种机器人模块化教学应用实训平台中,所述的推拉式作业模块为三个,且分别为第一作业模块、第二作业模块和第三作业模块,所述的侧开式功能模块为三个,且分别为第一侧开模块、第二侧开模块和第三侧开模块,所述的第一作业模块、第二作业模块和第三作业模块位于模块底座前部,所述的模块底座前部分别开设有供第一作业模块、第二作业模块和第三作业模块安装的第一开槽、第二开槽和第三开槽,所述的第一作业模块、第二作业模块和第三作业模块可分别沿第一开槽、第二开槽和第三开槽前后移动,所述的第一侧开模块与第二侧开模块位于模块底座的一侧部,所述的第三侧开模块位于模块底座的另一侧部,所述的模块底座一侧部分别开设有供第一侧开模块和第二侧开模块安装的第一滑槽和第二滑槽,所述的模块底座另一侧部开设有供第三侧开模块安装的第三滑槽,所述的第一侧开模块和第二侧开模块可分别沿第一滑槽和第二滑槽前后移动,所述的第三侧开模块可沿第三滑槽前后移动,所述的第一开槽、第二开槽和第三开槽内均设有控制第一作业模块、第二作业模块和第三作业模块前后移动的气缸一,所述的第一滑槽、第二滑槽和第三滑槽内均设有控制第一侧开模块、第二侧开模块和第三侧开模块前后移动的气缸二。
6.在上述的一种机器人模块化教学应用实训平台中,若干个所述功能模块为三个,且分别为搬运模块、码垛模块和涂胶模块。
7.在上述的一种机器人模块化教学应用实训平台中,所述的第一作业模块、第二作
业模块和第三作业模块顶部均为存放有工件的存放台面。
8.在上述的一种机器人模块化教学应用实训平台中,所述的第一侧开模块为搬运模块,第二侧开模块为码垛模块,第三侧开模块为涂胶模块。
9.在上述的一种机器人模块化教学应用实训平台中,所述的第一作业模块和第一开槽之间设有供第一作业模块前后移动的直线轨道。
10.与现有技术相比,本机器人模块化教学应用实训平台具有下列优点:加装将原单独的功能模块集合于一起的集成功能模块,学生需掌控机器人的操控方位以及选择各模块的开闭,能够提高教学应用的广泛性及拓展力,设置多功能集成模块,拓展学生的操作能力,提高学习的丰富性及乐趣性。
附图说明
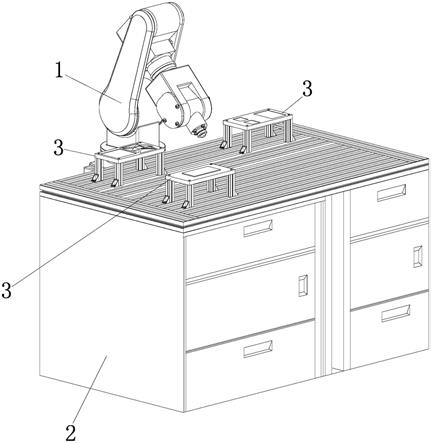
11.图1是本机器人模块化教学应用实训平台的立体结构示意图。
12.图2是功能集成模块的立体结构示意图。
13.图3是第一作业模块与气缸一的结构示意图。
14.图中,1、机器人;2、实训柜体;3、功能模块;4、功能集成模块;5、模块底座;6、连接座;7、集成功能控制板;8、第一作业模块;9、第二作业模块;10、第三作业模块;11、第一侧开模块;12、第二侧开模块;13、第三侧开模块;14、气缸一;15、直线轨道。
具体实施方式
15.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
16.如图1、图2、图3所示,本机器人模块化教学应用实训平台,包括机器人1和实训柜体2,机器人1位于实训柜体2外,在本实施例中,具有两种不同的模块实训方案,其中,在实训柜体2顶部可拆卸的安装有若干个功能模块3,多个功能模块3按要求有序摆布,学生通过控制机器人1对各功能模块3的功能、目进行作业;为了拓展学生的学习能力,实训柜体2顶部还可拆卸的安装有功能集成模块4,功能集成模块4由模块底座5、推拉式作业模块和侧开式功能模块组成,模块底座5底部的四边角处设有能与实训柜体2顶部相连的连接座6,模块底座5顶部设有集成功能控制板7。
17.推拉式作业模块为三个,且分别为第一作业模块8、第二作业模块9和第三作业模块10,侧开式功能模块为三个,且分别为第一侧开模块11、第二侧开模块12和第三侧开模块13,第一作业模块8、第二作业模块9和第三作业模块10位于模块底座5前部,模块底座5前部分别开设有供第一作业模块8、第二作业模块9和第三作业模块10安装的第一开槽、第二开槽和第三开槽,第一作业模块8、第二作业模块9和第三作业模块10可分别沿第一开槽、第二开槽和第三开槽前后移动,第一侧开模块11与第二侧开模块12位于模块底座5的一侧部,第三侧开模块13位于模块底座5的另一侧部,模块底座5一侧部分别开设有供第一侧开模块11和第二侧开模块12安装的第一滑槽和第二滑槽,模块底座5另一侧部开设有供第三侧开模块13安装的第三滑槽,第一侧开模块11和第二侧开模块12可分别沿第一滑槽和第二滑槽前后移动,第三侧开模块13可沿第三滑槽前后移动,第一开槽、第二开槽和第三开槽内均设有控制第一作业模块8、第二作业模块9和第三作业模块10前后移动的气缸一14,第一滑槽、第
二滑槽和第三滑槽内均设有控制第一侧开模块11、第二侧开模块12和第三侧开模块13前后移动的气缸二。
18.优选的,若干个功能模块3为三个,且分别为搬运模块、码垛模块和涂胶模块。
19.优选的,第一作业模块8、第二作业模块9和第三作业模块10顶部均为存放有工件的存放台面。
20.优选的,第一侧开模块11为搬运模块,第二侧开模块12为码垛模块,第三侧开模块13为涂胶模块。
21.对机器人1进行数控编程,使机器人1能够执行相应的动作命令,集成功能控制板7上集成有多个按键,其包括启停按键、第一作业模块8前后移动按键、第二作业模块9前后移动按键、第三作业模块10前后移动按键、第一侧开模块11前后移动按键、第二侧开模块12前后移动按键以及第三侧开模块13前后移动按键,执行工件搬运命令时,打开第一作业模块8,控制机器人1使机器人1的执行头移动至第一作业模块8位置处并取出相应工件,推出第一侧开模块11,将工件搬运至第一侧开模块11的相应位置处,执行工件码垛命令时,同理利用机器人1将第二作业模块9中的工件取出并有序摆布在第二侧开模块12上,涂胶时,将机器人1的执行头更换为涂胶用的涂胶装置,并打开第三侧开模块13,执行涂胶命令,第一作业模块8、第二作业模块9和第三作业模块10可根据其顶部的工件存量选择性打开。
22.进一步细说,第一作业模块8和第一开槽之间设有供第一作业模块8前后移动的直线轨道15,同理,第二作业模块9与第二开槽、第三作业模块10与第三开槽、第一侧开模块11与第一滑槽、第二侧开模块12与第二滑槽以及第三侧开模块13与第三滑槽之间均设置直线轨道15。
23.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
