1.本实用新型涉及康复医疗器械技术领域,尤其涉及一种腕关节康复器。
背景技术:
2.目前脑中卒、神经系统及骨科患者都需要腕关节功能康复,现有技术是通过人工辅助康复,需要大量的医护人员为患者提供专业的康复训练,耗费大量人工,医护人员劳动强度大,难以保证患者得到充足的训练时间。
3.现有的针对腕关节的康复训练装置多为结构简易的设备,仅可对患者手腕进行一个方向的训练,训练功能单一,训练效果不佳而且安全性差,而且与其配套的用于承托手臂的托架为固定结构,无法调整进而不能适应不同臂长的患者,患者训练的舒适性较差。为此提出一种腕关节康复器。
技术实现要素:
4.本实用新型为了解决现有腕关节康复训练装置的训练功能单一,训练安全性低的问题,提供一种腕关节康复器,可实现对患者腕关节多方位的康复训练,有效提高训练效果,同时保证训练的安全性。
5.为实现上述目的,本实用新型所采用的技术方案是:
6.一种腕关节康复器,包括可调ot桌,所述可调ot桌上设置固定底板,所述固定底板两侧分别设置有康复机构和多向调节臂托;
7.所述康复机构包括框架、设置在框架内的伺服电机、设置在框架上方的轴承支座和罩壳以及转动设置在轴承支座上的连接轴,所述连接轴与伺服电机带传动;
8.所述框架上还设置有用于检测连接轴旋转角度的角度编码器;所述连接轴两侧的轴承支座上设置有用于限制连接轴旋转的缓冲柱;所述罩壳罩设在框架上方,罩壳两侧分别设置有急停开关以停止伺服电机运行;
9.所述连接轴一端伸出罩壳同轴连接有过渡轴,过渡轴一端可拆卸连接有康复把手,所述康复把手为尺桡把手、旋前旋后把手或屈伸把手中的一种;
10.所述多向调节臂托包括固定座、转动设置在固定座上的长度伸缩杆、竖向设置在长度伸缩杆上的高度伸缩杆和设置在高度伸缩杆上的护腕托。
11.进一步地,所述可调ot桌螺栓连接所述固定底板,固定底板上设置所述框架,框架为角铁焊接而成的矩形架体结构。
12.进一步地,所述轴承支座包括螺栓连接在框架上的连接板以及竖向对称设置在连接板边缘的法兰安装板;所述法兰安装板上螺栓连接有内设轴承的轴承座,所述连接轴穿设在两个所述轴承座上。
13.进一步地,所述伺服电机输出轴上设置有小带轮,所述连接轴一端设置有大带轮,所述小带轮和大带轮之间设置有多楔带以传动。
14.进一步地,所述角度编码器与所述大带轮连接。
15.进一步地,所述连接轴包括轴体以及径向设置在轴体上的限位块,所述限位块位于两个轴承座之间,限位块和所述缓冲柱对应,缓冲柱为竖向设置在连接板两侧的橡胶圆柱体,缓冲柱与连接板螺栓连接,缓冲柱高度低于轴体所处高度。
16.进一步地,所述罩壳侧壁设置有角度标识,所述角度标识与所述过渡轴对应,过渡轴上设置有指示环,所述指示环配合角度标识以指示连接轴旋转角度。
17.进一步地,所述过渡轴插接在连接轴上、且和连接轴螺栓连接;所述尺桡把手、旋前旋后把手和屈伸把手均包括板状手柄托以及分别设置在手柄托两侧的环状连接座和柱状握手套;所述康复把手通过所述连接座插接在过渡轴端部、且和过渡轴螺丝连接。
18.进一步地,所述尺桡把手的手柄托弯折呈“ê”形,手柄托竖直段上设置所述连接座,手柄托水平段上设置所述握手套,握手套和手柄托连接组合后呈“u”形;所述旋前旋后把手的手柄托呈“[”形,手柄托中部设置所述连接座,手柄托两端之间布设所述握手套,握手套和手柄托连接组合后呈封闭矩形;所述屈伸把手的手柄托为平板状,手柄托上端设置所述连接座、下端设置所述握手套,握手套和手柄托连接组合后呈“ê”形。
19.进一步地,所述多向调节臂托位于康复手柄一侧,所述固定底板上设置所述固定座,固定座与所述长度伸缩杆螺栓连接以调整旋转,长度伸缩杆和所述高度伸缩杆连接组合后呈“﹂”形;所述长度伸缩杆上还设置有脚杯,所述脚杯抵在可调ot桌上。
20.通过上述技术方案,本实用新型的有益效果是:
21.本实用新型结构设计合理,通过对伺服电机的精确控制可实现主动训练、被动训练和助力训练,多种模式康复训练,能更好的为不同患病程度的患者提供康复训练。
22.本实用新型的康复把手包括尺桡把手、旋前旋后把手和屈伸把手,患者可进行包括腕关节尺桡偏、腕关节旋前旋后、腕关节屈伸六个方向的康复运动,训练功能丰富,强化训练效果。
23.本实用新型根据角度编码器可对连接轴进行旋转角度控制,在限位块和缓冲柱的配合作用下可对连接轴的旋转角度进行限制,具有双重安全性。同时设置的两个急停开关,患者可应急停机,对患者使用更安全可靠。
附图说明
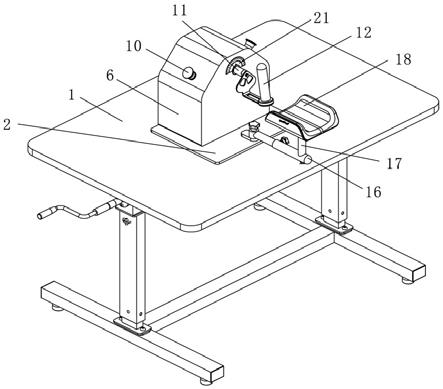
24.图1是本实用新型一种腕关节康复器的整体结构示意图。
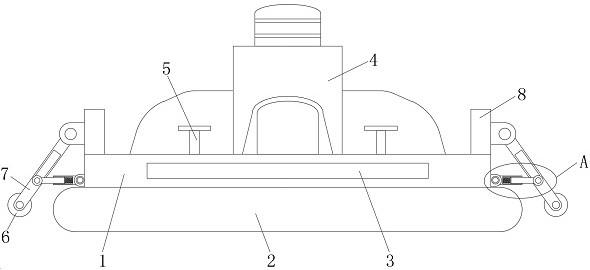
25.图2是本实用新型一种腕关节康复器的康复机构示意图。
26.图3是本实用新型一种腕关节康复器的罩壳内部结构示意图。
27.图4是本实用新型一种腕关节康复器的连接轴安装剖视图。
28.图5是本实用新型一种腕关节康复器的连接轴安装示意图。
29.图6是本实用新型一种腕关节康复器的尺桡把手与过渡轴拆分示意图。
30.图7是本实用新型一种腕关节康复器的多向调节臂托结构示意图。
31.图8是本实用新型一种腕关节康复器的旋前旋后把手安装示意图。
32.图9是本实用新型一种腕关节康复器的屈伸把手安装示意图。
33.附图中标号为:1为可调ot桌,2为固定底板,3为框架,4为伺服电机,5为轴承支座,51为连接板,52为法兰安装板,6为罩壳,7为连接轴,71为轴体,72为限位块,8为角度编码器,9为缓冲柱,10为急停开关,11为过渡轴,12为尺桡把手,13为旋前旋后把手,14为屈伸把
手,15为固定座,16为长度伸缩杆,161为长度内杆,162为长度外杆,17为高度伸缩杆,171为高度内杆,172为高度外杆,18为护腕托,19为轴承座,20为多楔带,21为角度标识,22为指示环,23为手柄托,24为连接座,25为握手套,26为脚杯。
具体实施方式
34.下面结合附图对本实用新型的具体实施方式做详细描述:
35.如图1~图7所示,一种腕关节康复器,包括可调ot桌1,可调ot桌1用做患者上肢运动训练的平台,可根据患者使用情况升降调节高度来满足不同患者的训练要求,使用方便,操作简单,适用范围大。在可调ot桌1上放置不同的训练附件或设备供不同的患者进行康复训练。
36.本实施例中,所述可调ot桌1上设置固定底板2,固定底板2在安装时,所述可调ot桌1螺栓连接所述固定底板2,所述固定底板2两侧分别设置有康复机构和多向调节臂托。
37.康复机构用于患者手腕关节的康复训练,所述康复机构包括框架3、设置在框架3内的伺服电机4、设置在框架3上方的轴承支座5和罩壳6以及转动设置在轴承支座5上的连接轴7。
38.所述固定底板2上设置所述框架3,框架3为角铁焊接而成的矩形架体结构,框架3上螺栓连接所述轴承支座5。轴承支座5在安装时,所述轴承支座5包括螺栓连接在框架3上的长方形连接板51以及竖向对称设置在连接板51边缘的法兰安装板52。
39.所述法兰安装板52上螺栓连接有内设深沟球轴承的轴承座19,所述连接轴7穿设在两个所述轴承座19上,进而连接轴7可进行旋转。
40.为了驱动连接轴7的旋转,所述连接轴7与伺服电机4带传动。具体的,所述伺服电机4输出轴上设置有小带轮,所述连接轴7一端设置有大带轮,所述小带轮和大带轮之间设置有多楔带20以传动,进而可将伺服电机4的动力传递至连接轴7、驱动连接轴7旋转。
41.为了监测连接轴7的旋转角度,所述框架3上还设置有用于检测连接轴7旋转角度的角度编码器8。角度编码器8在安装时,其固定在框架3上,角度编码器8的转轴与所述大带轮连接,大带轮与连接轴7同步旋转,进而可监测连接轴7的旋转角度。
42.为了对连接轴7旋转进行限制,所述连接轴7两侧的轴承支座5上设置有用于限制连接轴7旋转的缓冲柱9。
43.缓冲柱9在安装时,所述缓冲柱9为竖向设置在连接板51两侧的橡胶圆柱体,缓冲柱9与连接板51螺栓连接,缓冲柱9高度低于轴体71所处高度。
44.为了实现缓冲柱9的限制作用,所述连接轴7包括轴体71以及径向设置在轴体71上的限位块72,所述限位块72为矩形块,限位块72位于两个轴承座19之间,限位块72和所述缓冲柱9对应,通过限位块72和缓冲柱9的配合实现对连接轴7旋转角度的限制。
45.连接轴7旋转带动限位块72一同偏转,当限位块72抵在缓冲柱9上,连接轴7则受到限制、不可继续旋转,进而限制了连接轴7的旋转角度,避免手腕过度训练而受伤。
46.本实施例中,所述罩壳6罩设在框架3上方,罩壳6两侧分别设置有急停开关10,急停开关10用于紧急停止伺服电机4运行,保证患者训练的安全可靠。
47.为了将连接轴7的旋转运动转化为手腕的康复训练,所述连接轴7一端伸出罩壳6同轴连接有过渡轴11。过渡轴11在安装时,所述过渡轴11插接在连接轴7上、且和连接轴7螺
栓连接。
48.具体的,所述连接轴7端部对称设置有凸块,所述过渡轴11端部开设有凹槽,所述凸块插入凹槽内,同时通过螺栓来连接过渡轴11和连接轴7,螺栓内置在过渡轴11内。
49.所述过渡轴11一端可拆卸连接有康复把手,所述康复把手为尺桡把手12、旋前旋后把手13或屈伸把手14中的一种。所述尺桡把手12、旋前旋后把手13和屈伸把手14均包括板状手柄托23以及分别设置在手柄托23两侧的环状连接座24和柱状握手套25。三种不同功能的把手可提供六个方向的康复运动,实现不同的训练效果。
50.康复把手在安装时,所述康复把手通过所述连接座24插接在过渡轴11端部、且和过渡轴11通过手拧螺丝连接。康复把手和过渡轴11的连接方式与连接轴7和过渡轴11的连接方式相同,此处不再赘述。
51.本实施例中,所述康复把手为尺桡把手12,所述尺桡把手12的手柄托23弯折呈“ê”形,手柄托23竖直段上设置所述连接座24,手柄托23水平段上设置所述握手套25,握手套25和手柄托23连接组合后呈“u”形,握手套25高度高于手柄托23高度。采用尺桡把手12可进行腕关节尺桡偏训练。
52.多向调节臂托用于在患者腕关节康复训练时良好支撑患者手臂,所述多向调节臂托位于康复手柄一侧,多向调节臂托包括固定座15、转动设置在固定座15上的长度伸缩杆16、竖向设置在长度伸缩杆16上的高度伸缩杆17和设置在高度伸缩杆17上的护腕托18。
53.所述固定底板2上设置所述固定座15,固定座15与所述长度伸缩杆16螺栓连接以调整旋转,长度伸缩杆16和所述高度伸缩杆17连接组合后呈“﹂”形。
54.具体的,所述长度伸缩杆16包括内外滑接的长度内杆161和长度外杆162,所述长度内杆161一端通过手拧螺栓与所述固定座15连接,长度内杆161和长度外杆162之间设置有手拧螺栓以锁紧。
55.所述高度伸缩杆17包括内外滑接的高度内杆171和高度外杆172,所述高度外杆172竖向设置在长度外杆162上,高度内杆171和高度外杆172之间也设置有手拧螺栓以锁紧,高度内杆171上方设置有所述护腕托18,患者手臂可搁置在护腕托18上。
56.为了稳定支撑患者手臂,所述长度伸缩杆16上还设置有脚杯26,所述脚杯26抵在可调ot桌1上。脚杯26安装在长度外杆162上、且和高度外杆172上下对应,在脚杯26的作用下,可避免长度伸缩杆16悬空。
57.多向调节臂托可实现以固定座15的旋转中心为圆心实现360度内任意调节,然后通过长度伸缩杆16在长度方向上可调节,高度上可通过高度伸缩杆17实现上下的高度的调节,进而实现对不同人群、对设备使用位置进行调节,更方便于患者,可仅通过调节臂托角度实现位置调整,配合上肢康复设备实现左手、右手不同手臂的支撑,做上肢的康复训练,简单方便。
58.利用本康复器开展腕关节康复训练时,根据需要选择相应的康复把手将其与过渡轴11螺丝安装,而后调整多向调节臂托使其处于合适姿态,以便于患者手臂舒适放置,不同功能的康复把手对应多向调节臂托的不同姿态。
59.以尺桡训练为例,将尺桡把手12安装后,患者手臂搁置在护腕托18上,启动伺服电机4,伺服电机4配合角度编码器8来自动控制连接轴7的旋转角度,通过伺服电机4带动尺桡把手12动力进而开展被动训练。被动训练时,患者无论进行左手还是右手训练都可以通过
急停开关10进行应急停机,对患者使用更安全可靠。
60.伺服电机4基于伺服控制原理,结合角度编码器8形成控制闭环,在速度控制,力矩控制,角度控制方面控制精度更高,可提高设备使用的安全性。通过对伺服电机4的精确控制,提供不同的阻力,也可使患者开展主动训练和助力训练。
61.上述康复训练过程中,为了便于直观显示手腕的偏转角度,所述罩壳6侧壁设置有角度标识21,所述角度标识21与所述过渡轴11对应,角度标识21包括半圆板以及印刷在半圆板上的角度刻度。
62.所述过渡轴11上设置有指示环22,所述指示环22配合角度标识21以指示连接轴7旋转角度,指示环22可指示角度标识21上的角度。
63.如图8所示,所述康复把手为旋前旋后把手13,所述旋前旋后把手13的手柄托23呈“[”形,手柄托23中部设置所述连接座24,手柄托23两端之间布设所述握手套25,握手套25和手柄托23连接组合后呈封闭矩形。采用旋前旋后把手13可进行腕关节旋前、旋后的训练。
64.如图9所示,所述康复把手为屈伸把手14,所述屈伸把手14的手柄托23为平板状,手柄托23上端设置所述连接座24、下端设置所述握手套25,握手套25和手柄托23连接组合后呈“ê”形。采用屈伸把手14可进行腕关节弯曲、伸展的训练。
65.本实用新型设备小巧,整体质量轻便可直接安装在桌面上使用,占用空间小,移动方便。同时提供有主动、被动和助力训练三种训练模式,能更好的为不同患病程度的患者提供康复训练。康复训练过程中,角度编码器8对连接轴7旋转角度进行控制,限位块72配合缓冲柱9对连接轴7旋转进行限位,达到双重的安全保护作用。
66.以上所述之实施例,只是本实用新型的较佳实施例而已,并非限制本实用新型的实施范围,故凡依本实用新型专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本实用新型申请专利范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。