1.本实用新型涉及扎带机技术领域,尤其涉及一种智能扎带机。
背景技术:
2.扎带在很多产业和行业应用中都有被广泛使用,传统扎带都需要手工完成扎紧的动作,或是借用手工扎带枪等工具完成扎带的扎紧和切断,效率低,扎紧的力度不可调整或是扎紧的松紧力度不精准,现有的大型的自动扎带设备体积庞大,维护复杂且成本高昂,采用电机配合扭力传感器来控制扎紧力,精度不高,有待改进。
技术实现要素:
3.本实用新型的目的在于提供一种扎紧力度多级可调、扎紧力度控制精准、体积小巧、控制方便的智能扎带机。
4.本实用新型是这样实现的:一种智能扎带机,包括扎带拉紧装置和扎带切带装置,所述扎带拉紧装置包括第一舵机、主动棘轮和从动棘轮,所述第一舵机带动主动棘轮旋转,主动棘轮和从动棘轮旋转将扎带拉紧;所述扎带切带装置包括第二舵机、连杆、第一轴、铡刀和偏心轮,所述连杆旋转地设置在第一轴上,所述铡刀固定设置在连杆一端,所述连杆的另一端设有条形孔,所述偏心轮上的偏心轴滑动设置在所述条形孔内,所述偏心轮固定在第二舵机的转动轴上,所述第二舵机带动偏心轮旋转,偏心轮上的偏心轴旋转带动连杆绕第一轴旋转,固定在连杆上的铡刀跟随连杆运动,以便将扎带切断。
5.其中,所述智能扎带机还包括外壳,所述第一舵机和第二舵机均固定在外壳的内壁上,且上下平行布置,所述外壳上两相对的侧壁上还设有扎带入口和扎带出口,所述连杆和铡刀设置在扎带入口处。
6.其中,所述智能扎带机还包括控制板和显示模块,所述第一舵机、第二舵机和显示模块均与控制板电连接。
7.其中,所述智能扎带机还包括设定按钮,所述设定按钮设置在外壳上,并与控制板电连接,用于设定扎带机的运行参数。
8.其中,所述扎带入口处还设有光电传感器,所述光电传感器与控制板电连接,用于感应扎带。
9.其中,所述智能扎带机还包括状态指示灯,所述状态指示灯设置在外壳上,并与控制板电连接,用于指示扎带机的运行状态。
10.本实用新型的有益效果为:所述智能扎带机包括扎带拉紧装置和扎带切带装置,扎带拉紧装置和扎带切带装置的动力总成均采用舵机,舵机具有智能化程度高、体积小、成本低、维护简单、扭力控制幅度大、精准等优点,使扎带拉紧装置实现扎紧力度多级可调,扎紧力度控制精准,使扎带切带装置体积更小巧,控制方便,切断效率高,相比现有技术进步较大。
附图说明
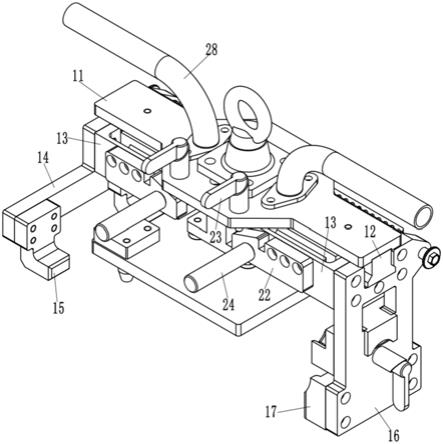
11.图1是本实用新型所述智能扎带机实施例的整体结构示意图;
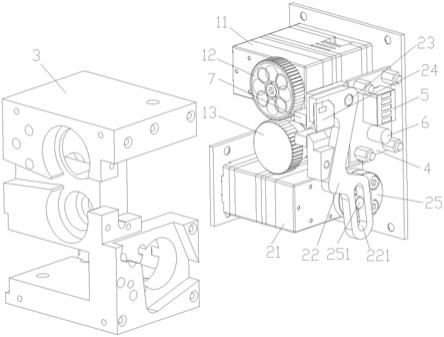
12.图2是本实用新型所述智能扎带机实施例的部分分解的立体图;
13.图3是本实用新型所述智能扎带机实施例的部分分解的正视图;
14.图4是本实用新型所述智能扎带机实施例的部分分解的侧视图;
15.图5是本实用新型所述智能扎带机实施例的进一步分解结构示意图。
16.1、扎带拉紧装置;11、第一舵机;12、主动棘轮;13、从动棘轮;2、扎带切带装置;21、第二舵机;22、连杆;221、条形孔;23、第一轴;24、铡刀;25、偏心轮;251、偏心轴;3、外壳;31、扎带入口;32、扎带出口;4、控制板;5、显示模块;6、设定按钮;7、光电传感器。
具体实施方式
17.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
18.作为本实用新型所述智能扎带机的实施例,如图1至图5所示,包括扎带拉紧装置1和扎带切带装置2,所述扎带拉紧装置1包括第一舵机11、主动棘轮12和从动棘轮13,所述第一舵机11带动主动棘轮12旋转,主动棘轮12和从动棘轮13旋转将扎带拉紧;所述扎带切带装置2包括第二舵机21、连杆22、第一轴23、铡刀24和偏心轮25,所述连杆22旋转地设置在第一轴23上,所述铡刀24固定设置在连杆22一端,所述连杆22的另一端设有条形孔221,所述偏心轮25上的偏心轴251滑动设置在所述条形孔221内,所述偏心轮25固定在第二舵机21的转动轴上,所述第二舵机21带动偏心轮25旋转,偏心轮25上的偏心轴251旋转带动连杆22绕第一轴23旋转,固定在连杆22上的铡刀24跟随连杆22运动,以便将扎带切断。
19.在本实施例中,所述智能扎带机还包括外壳3,所述第一舵机11和第二舵机21均固定在外壳3的内壁上,且上下平行布置,所述外壳3上两相对的侧壁上还设有扎带入口31和扎带出口32,所述连杆22和铡刀24设置在扎带入口31处。所述第一舵机11和第二舵机21上下平行布置,布局合理,占用的空间更小,整个扎带机体积更小。
20.在本实施例中,所述智能扎带机还包括控制板4和显示模块5,所述第一舵机11、第二舵机21和显示模块5均与控制板4电连接。所述控制板4集成一颗微处理器控制(mcu),作为扎带机的大脑,可以控制整个扎带机自动化作业,实现自动扎紧和切断功能。
21.在本实施例中,所述智能扎带机还包括设定按钮6,所述设定按钮6设置在外壳3上,并与控制板4电连接,用于设定扎带机的运行参数。
22.在本实施例中,所述扎带入口31处还设有光电传感器7,所述光电传感器7与控制板4电连接,用于感应扎带。
23.在本实施例中,所述智能扎带机还包括状态指示灯(未示出),所述状态指示灯设置在外壳3上,并与控制板4电连接,用于指示扎带机的运行状态。
24.所述智能扎带机包括扎带拉紧装置1和扎带切带装置2,扎带拉紧装置1和扎带切带装置2的动力总成均采用舵机,舵机具有智能化程度高、体积小、成本低、维护简单、扭力控制幅度大、精准等优点,使扎带拉紧装置1实现扎紧力度多级可调,扎紧力度控制精准,使扎带切带装置2体积更小巧,控制方便,切断效率高,相比现有技术进步较大。
25.本实用新型所述智能扎带机的工作原理为:所述第一舵机11、主动棘轮12和从动棘轮13负责扎带的自动卷紧,至设定扭力后停止卷紧工作,第一舵机11负责扎带扎紧的力度;通过控制板4和设定按钮6,可以完成不同扭力大小的设定;第二舵机21结合偏心轮25、连杆22和铡刀24,负责扎带的切断。智能扎带机的控制系统上电后,完成自检;然后按动“档位设定”的设定按钮6,根据使用场景的需要,设定卷紧的力度(实际产品至少有5档扭力可调);开始扎带工作时,手动把扎带头通过扎带入口31送入智能扎带机;此时光电传感器7检测到扎带送入后,控制板4发出信号,启动第一舵机11开始工作,带动主动棘轮12和从动棘轮13,将扎带收紧至设定的扭力,然后停止工作,并送出完成信号回控制板4;所述控制板4发出控制信号,启动第二舵机21开始工作,带动偏心轮25、连杆22和铡刀24,完成一次往复,切断扎带;所述控制板4再次发出控制信号,启动第一舵机11开始工作,把残余的扎带尾段送出智能扎带机;所述控制板4点亮状态指示灯(led),并通过通讯接口送出完成信号给外部系统;所述控制板4上的微处理器控制(mcu)与光电传感器7、状态指示灯、设定按钮6、第一舵机11、第二舵机21和显示模块5均电连接,实现信号传递和控制动作,所述第一舵机11和第二舵机21通过uart总线与控制板4电连接,现有技术中利用控制板来控制第一舵机和第二舵机均为现有技术,可以直接转用到本技术中,所以在此申请中不做过多描述。
26.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。