技术特征:
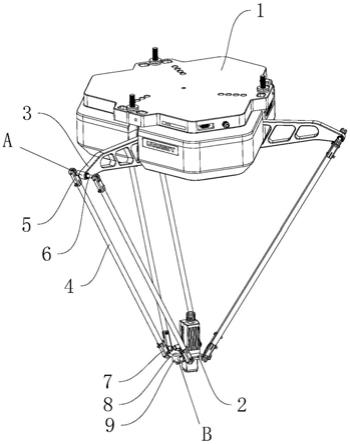
1.一种delta并联机器人,包括固定平台、运动平台以及设置于固定平台与运动平台之间的连接机构,其特征在于:所述连接机构包括若干驱动臂和驱动装置,所述驱动臂包括主动臂、从动臂、第一转轴、第一连接头、第二转轴和第二连接头,所述主动臂的一端与驱动装置连接,另一端与第一转轴转动连接,所述第二转轴转动连接于运动平台上,所述第一连接头和第二连接头分别安装于从动臂的两端,并且第一连接头与第一转轴铰接,第二连接头与第二转轴铰接,所述第一连接头相对于第一转轴的转动平面与第一转轴相对于主动臂的转动平面相互垂直,所述第二连接头相对于第二转轴的转动平面与第二转轴相对于运动平台的转动平面相互垂直。2.根据权利要求1所述的一种delta并联机器人,其特征在于:所述从动臂包括两根从动连杆,所述第一连接头和第二连接头均设置有两个,两个第一连接头和第二连接头分别安装于两根从动连杆的两端,所述第一转轴的两端分别伸出至主动臂的两侧,两根从动连杆分别位于主动臂的两侧,并且两个第一连接头分别与第一转轴的两端铰接,所述第二转轴的两端分别伸出至运动平台的两侧,两个第二连接头分别与第二转轴的两端铰接。3.根据权利要求2所述的一种delta并联机器人,其特征在于:所述主动臂远离驱动装置的一端设置有水平贯穿的第一转动孔,所述主动臂的两侧且位于第一转动孔处均设置有第一轴承孔,两侧的第一轴承孔内分别设置有相对的第一角接触轴承,所述第一转轴穿过第一转动孔,并且第一转轴与第一角接触轴承接触配合,所述第一转轴位于主动臂的两侧处分别设置有定位轴肩和限位套,用于定位并锁紧第一角接触轴承并消除第一角接触轴承的轴承间隙。4.根据权利要求2所述的一种delta并联机器人,其特征在于:所述第一转轴的两端均设置有第一铰接孔,所述第一连接头上设置有第一伸入槽,第一伸入槽的两侧分别设置有第二轴承孔,两侧的第二轴承孔内均设置有第一深沟球轴承,所述第一转轴的两端分别伸入两个第一连接头的第一伸入槽内,所述第一铰接孔内设置有第一销轴,所述第一销轴的两端分别伸出第一铰接孔并与两侧的第一深沟球轴承接触配合。5.根据权利要求3所述的一种delta并联机器人,其特征在于:所述运动平台上设置有若干固定座,所述第二转轴与固定座转动连接,并且第二转轴和固定座的连接结构与第一转轴与主动臂的连接结构一致。6.根据权利要求4所述的一种delta并联机器人,其特征在于:所述第二连接头和第二转轴的连接结构与第一连接头和第一转轴的连接结构一致。7.根据权利要求2所述的一种delta并联机器人,其特征在于:所述第一连接头和第二连接头均与从动连杆可拆卸连接。
技术总结
本实用新型公开了一种Delta并联机器人,包括固定平台、运动平台以及连接机构,所述连接机构包括若干驱动臂和驱动装置,所述驱动臂包括主动臂、从动臂、第一转轴、第一连接头、第二转轴和第二连接头,所述主动臂的一端与驱动装置连接,另一端与第一转轴转动连接,所述第二转轴转动连接于运动平台上,所述第一连接头和第二连接头分别安装于从动臂两端,并且第一连接头与第一转轴铰接,第二连接头与第二转轴铰接,所述第一连接头相对于第一转轴的转动平面与第一转轴相对于主动臂的转动平面相互垂直,所述第二连接头相对于第二转轴的转动平面与第二转轴相对于运动平台的转动平面相互垂直;该Delta并联机器人能够实现更大范围的移动,且更加灵活。且更加灵活。且更加灵活。
技术研发人员:朱海鸿 曾莉 顾展晴
受保护的技术使用者:上海优爱宝智能机器人科技股份有限公司
技术研发日:2021.12.13
技术公布日:2022/5/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。