1.本实用新型涉及智能垃圾桶技术领域,具体涉及一种智能垃圾收集器。
背景技术:
2.现有的智能垃圾桶已经具备了自动打包的功能,但是对于自动打包的启动需要用户去长按按键才能开启打包功能。授权公告号为:cn210192435u的专利公开了一种可以对垃圾袋内的垃圾盛装量进行检测并自动打包封口的智能垃圾桶,该检测装置为触动弹簧片,当垃圾袋内的垃圾碰触到触动弹簧片时检测装置检测到垃圾装满,起到打包装置进行垃圾袋进行打包封口。该判断装置依靠机械触碰后才能够判断出垃圾袋内的垃圾是否装满,当盛装的垃圾过轻时则不能够起到判断作用。
3.对比文件公开了一种具有自动打包功能的智能垃圾桶,涉及智能垃圾桶技术领域。包括:垃圾桶、上盖和垃圾袋,所述垃圾袋上设有待测标记,所述上盖下方设有卡槽,所述卡槽内设有检测所述待测标记的探测器组件,所述探测器组件与所述上盖倾斜设置使所述探测器组件的探测口对准所述垃圾桶的桶身开口位置的垃圾袋。
技术实现要素:
4.本实用新型提供一种智能垃圾收集器,利用本实用新型的结构,能够自动取垃圾袋、套设垃圾袋和打包垃圾袋。
5.为达到上述目的,本实用新型的技术方案是:一种智能垃圾收集器,包括外桶体、内桶体、第一翻盖、第二翻盖、封口机构、垃圾袋输送机构、检测机构、排气机构、紫外杀菌灯、切袋机构、语音模块和控制模块;
6.外桶体内设有内桶体,内桶体设置在外筒体内的中间位置,内桶体与外桶体的内侧壁之间形成间隔层,排气机构设置在间隔层内;第一翻盖转动设置在外桶体的开口上;第一翻盖上对应内桶体的开口设有翻盖开口;第一翻盖上转动设有第二翻盖,第一翻盖上设有用于驱动第二翻盖转动的翻盖电机;当第二翻盖盖合时,第二翻盖盖合第一翻盖上的开口;切袋机构设置在第二翻盖上;
7.封口机构设置在第一翻盖上,且分别设置在翻盖开口的两侧;
8.垃圾袋输送机构设置在第二翻盖上,且垃圾袋输送机构位于翻盖开口的上方;
9.检测机构包括垃圾超限检测模块和人体检测模块;垃圾超限检测模块用于检测内桶体内的垃圾高度;人体检测模块用于检测范围内是否有人接近;
10.语音模块;语音模块用于播放预先录制的语音提醒内桶体内的垃圾已满;
11.控制模块设置在外桶体内,控制模块分别与封口机构、垃圾袋输送机构、检测机构、语音模块、排气机构、紫外杀菌灯和翻盖电机电连接;
12.紫外杀菌灯对称设置在第一翻盖靠近内桶体的两侧。
13.以上设置,可通过垃圾袋输送机构自动输送垃圾袋,每输送一个垃圾袋后,两封口机构抵接夹持住垃圾袋,通过切袋机构将其切断;随后,由于两侧的粘胶条已粘贴在垃圾袋
开口的两侧,在两封口机构收回时一同将垃圾袋打开,步骤紧凑;随后通过抽风机降低内桶体底部的气压,便于打开垃圾袋;这样,从取袋到套袋的动作中,都无需人工调节垃圾袋,使用方便;当检测到外桶体外有人靠近,控制模块控制翻盖电机打开第二翻盖,便于使用者扔垃圾;另外,当只有在开盖后垃圾收集器才会发出垃圾已装满的报警,提醒人们不要继续投入垃圾;当第一翻盖和第二翻盖都处于闭合状态时,控制模块驱动紫外杀菌灯工作,对内桶体进行杀菌;同时抽风机持续工作,防止垃圾袋内的垃圾发臭;通过垃圾超限检测模块检测到垃圾装满后,两个封口机构将垃圾袋夹持住,通电加热热封条,使得垃圾袋加热封口,完成对垃圾袋的打包;这样,取垃圾袋、套设垃圾袋和打包垃圾袋的动作都无需人工参与,还能通过紫外杀菌灯对内桶体进行杀菌,减少内桶体内产生的异味和细菌。
14.进一步地,封口机构的数量设置为两个,封口机构包括伸缩电机、伸缩机构、夹持件、热封条和粘胶条;封口机构通过伸缩机构固定安装在第一翻盖的固定槽上;夹持件与伸缩机构连接,伸缩机构用于带动夹持件靠近或远离另一封口机构,伸缩电机用于驱动伸缩机构;热封条设置在夹持件靠近另一夹持机构的一侧上,热封条通过弹性件与夹持件弹性连接;夹持件上对应热封条设置有热封凹槽,弹性件的一端固定设置在热封凹槽内,弹性件的另一端与热封条固定连接;粘胶条设置在夹持件上,且位于热封条的一侧;当两个封口机构上的夹持件相互抵接时,热封条挤压弹性件并向热封凹槽方向移动,此时,两封口机构上的粘胶条相互抵接;以上设置,当套设垃圾袋时,垃圾袋开口的两侧与两个封口机构的粘胶条粘贴连接,垃圾袋随着两个封口机构带动而打开,同时,垃圾袋开口的两侧在打开后依然粘贴连接在两封口机构的粘胶条上,这样,使得垃圾袋的开口不会掉落进入内桶体内部,从而防止出现垃圾掉落在垃圾袋与内桶体之间的情况。
15.进一步地,第二翻盖在垃圾袋输送机构的下方设置有送袋通槽;第二翻盖在送袋通槽的两侧壁上分别设有切袋凹槽;切袋凹槽分别向远离送袋通槽的方向凹陷形成。
16.进一步地,切袋机构包括切袋电机、刀片和切袋连杆;切袋电机安装在第二翻盖上,切袋电机的输出端与切袋连杆的一端固定连接,切袋连杆的另一端与刀片固定连接;刀片位于两送袋导向轴的下方;通过切袋电机正反转,通过切袋连杆驱动刀片在切袋凹槽内往复运动,切割垃圾袋。
17.进一步地,垃圾袋输送机构包括输送壳体、送袋电机、两个送袋导向轴和垃圾袋挂轴;两个送袋导向轴转动设置在输送壳体上,两送袋导向轴之间对应间隔设置;当垃圾袋穿过两个送袋导向轴之间的间隔时,两送袋导向轴转动可带动垃圾袋向送袋通槽方向输送;送袋电机用于驱动两个送袋导向轴转动,分别与两个送袋导向轴传动连接;当垃圾袋输送机构输送垃圾袋时,送袋电机驱动,送袋导向轴带动垃圾袋挂轴上的垃圾袋穿过送袋通槽进入内桶体。
18.进一步地,排气机构包括抽风机、进风槽和分流罩;抽风机设置在隔离层上,内桶体的侧壁在抽风机的一侧设有若干个分流槽,分流槽对应抽风机的大小设置;分流罩对应分流槽设置在内桶体内,分流槽设置在分流罩内;进风槽设置在内桶体靠近抽风机的一侧壁的下端,且进风槽与分流罩连通,进风槽上设置有若干个沿进风槽长度方向排布的进风通孔。
19.进一步地,紫外线灯条的发光方向倾斜朝向内桶体设置;这样,紫外线杀菌灯发出的紫外线更集中地照射在内桶体内。
20.进一步地,第一翻盖在靠近内桶体的一侧还设有照明光源。
附图说明
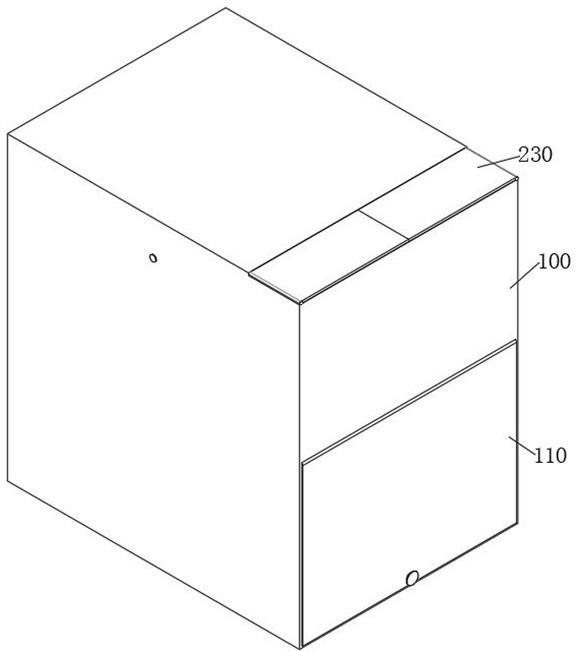
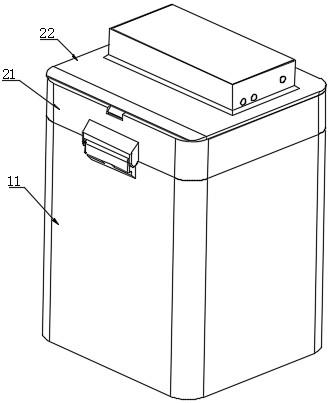
21.图1为本实用新型的立体结构示意图。
22.图2为本实用新型一立体角度的爆炸示意图。
23.图3为本实用新型另一立体角度的爆炸示意图。
24.图4为本实用新型中第二翻盖和垃圾袋输送机构的立体结构示意图。
25.图5为本实用新型中的两个封口机构的立体结构示意图。
26.图6为本实用新型中中第二翻盖、垃圾袋输送机构和切袋机构的爆炸示意图。
27.图7为本实用新型的主视结构示意图。
28.图8为图7中a-a处的剖视结构示意图。
29.图9为图8中c处的局部放大示意图。
30.图10为图8中d处的局部放大示意图。
31.图11为图8中e处的局部放大示意图。
32.图12为本实用新型的侧视结构示意图。
33.图13为图12中b-b处的剖视结构示意图。
34.图14为图13中f处的局部放大示意图。
35.附图标记:11、外桶体;12、内桶体;13、间隔层;21、第一翻盖;211、翻盖开口;212、固定槽;22、第二翻盖;221、送袋通槽;222、切袋凹槽;3、封口机构;31、伸缩电机;321、伸缩基座;322、伸缩从动轮;324、伸缩臂;33、夹持件;331、夹持连接件;34、热封条;35、粘胶条;36、弹性件;4、垃圾袋输送机构;41、输送壳体;42、送袋电机;43、送袋导向轴;44、垃圾袋挂轴;45、送袋从动轮;46、送袋驱动轮;51、抽风机;52、进风槽;521、进风通孔;53、分流罩;54、分流槽;55、排气通孔;6、紫外杀菌灯;61、照明光源;71、切袋电机;72、刀片;73、切袋连杆;731、切袋第一连杆;732、切袋第二连杆。
具体实施方式
36.下面结合附图和具体实施方式对本实用新型做进一步详细说明。
37.如图1-图14所示,一种智能垃圾收集器,包括外桶体11、内桶体12、第一翻盖21、第二翻盖22、封口机构3、垃圾袋输送机构4、检测机构、排气机构、紫外杀菌灯6、切袋机构、语音模块和控制模块。
38.外桶体11内设有内桶体12,内桶体12设置在外筒体内的中间位置,内桶体12与外桶体11的内侧壁之间形成间隔层13,排气机构设置在间隔层13内;第一翻盖21转动设置在外桶体11的开口上;第一翻盖21上对应内桶体12的开口设有翻盖开口211;第一翻盖21上转动设有第二翻盖22,第一翻盖21上设有用于驱动第二翻盖22转动的翻盖电机(图中未示出);当第二翻盖22盖合时,第二翻盖22盖合第一翻盖21上的开口;切袋机构设置在第二翻盖22上。
39.封口机构3设置在第一翻盖21上,且分别设置在翻盖开口211的两侧;垃圾袋输送机构4设置在第二翻盖22上,且垃圾袋输送机构4位于翻盖开口211的上方;检测机构包括垃圾超限检测模块和人体检测模块;垃圾超限检测模块用于检测内桶体12内的垃圾高度;人
体检测模块用于检测范围内是否有人接近。
40.在本实施例中,垃圾超限检测模块(图中未示出)和人体检测模块(图中未示出)均为红外传感器。其中,将垃圾超限检测模块设置在第一翻盖21靠近内桶体12的一侧面上,当垃圾的高度达到垃圾超限检测模块检测范围时,判断为内桶体12内的垃圾达到预设高度。其中,人体检测模块(图中未示出)设置在外桶体11的外侧壁上,用红外传感器进行检测为现有技术,在此不再累述。
41.语音模块;语音模块用于播放预先录制的语音提醒内桶体12内的垃圾已满;语音模块为现有技术,在此不再累述。
42.控制模块(图中未示出)设置在外桶体11内,控制模块分别与封口机构3、垃圾袋输送机构4、检测机构、语音模块、排气机构、紫外杀菌灯6和翻盖电机电连接;其中,控制模块为单片机。
43.紫外杀菌灯6对称设置在第一翻盖21靠近内桶体12的两侧;其中,紫外杀菌灯6为紫外线灯条;其中,紫外线灯条的发光方向倾斜朝向内桶体12设置;这样,紫外线杀菌灯发出的紫外线更集中地照射在内桶体12内;第一翻盖21在靠近内桶体12的一侧还设有照明光源61,照明光源61为led灯条。
44.第一翻盖21在远离第二翻盖22的一侧设有用于安装封口机构3的固定槽212,固定槽212分别设置在翻盖开口211的两侧向远离翻盖开口211的方向凹陷形成。
45.封口机构3的数量设置为两个,封口机构3包括伸缩电机31、伸缩机构、夹持件33、热封条34和粘胶条35;封口机构3通过伸缩机构固定安装在第一翻盖21的固定槽212上;夹持件33与伸缩机构连接,伸缩机构用于带动夹持件33靠近或远离另一封口机构3,伸缩电机31用于驱动伸缩机构;热封条34设置在夹持件33靠近另一夹持机构的一侧上,热封条34通过弹性件36与夹持件33弹性连接;夹持件33上对应热封条34设置有热封凹槽,弹性件36的一端固定设置在热封凹槽内,弹性件36的另一端与热封条34固定连接;粘胶条35可拆卸设置在夹持件33上,且位于热封条34的一侧;当两个封口机构3上的夹持件33相互抵接时,热封条34挤压弹性件36并向热封凹槽方向移动,此时,两封口机构3上的粘胶条35相互抵接;其中,弹性件36为弹簧;粘胶条35为现有技术中的双面胶或海绵胶。
46.伸缩机构包括伸缩基座321、伸缩驱动轮、伸缩从动轮322、伸缩臂324;伸缩从动轮322的数量设置为两个,伸缩驱动轮与伸缩电机31的输出端连接,伸缩驱动轮分别与两个伸缩从动轮322啮合;伸缩臂324的数量设置为两个,伸缩臂324分别与伸缩从动轮322固定连接;夹持件33的两端分别对应伸缩臂324设置有夹持连接件331,伸缩臂324远离伸缩从动轮322的一端铰接上夹持连接件331上;以上设置,当伸缩电机31驱动时,带动伸缩臂324转动,从而带动夹持件33靠近或远离另一封口机构3。
47.第二翻盖22在垃圾袋输送机构4的下方设置有送袋通槽221;第二翻盖22在送袋通槽221的两侧壁上分别设有切袋凹槽222;切袋凹槽222分别向远离送袋通槽221的方向凹陷形成。
48.切袋机构包括切袋电机71、刀片72和切袋连杆73;切袋电机71安装在第二翻盖22上,切袋电机71的输出端与切袋连杆73的一端固定连接,切袋连杆73的另一端与刀片72固定连接;刀片72位于两送袋导向轴43的下方;通过切袋电机71正反转,通过切袋连杆73驱动刀片72在切袋凹槽222内往复运动,切割垃圾袋。
49.其中,切袋连杆73包括切袋第一连杆731和切袋第二连杆732,切袋第一连杆731的一端与切袋电机71固定连接,切袋第一连杆731的另一端与切袋第二连杆732铰接;切袋第二连杆732在远离切袋电机71的一端与刀片72固定连接。
50.垃圾袋输送机构4包括输送壳体41、送袋电机42、两个送袋导向轴43和垃圾袋挂轴44;两个送袋导向轴43转动设置在输送壳体41上,两送袋导向轴43之间对应间隔设置;当垃圾袋穿过两个送袋导向轴43之间的间隔时,两送袋导向轴43转动可带动垃圾袋向送袋通槽221方向输送;送袋电机42用于驱动两个送袋导向轴43转动,分别与两个送袋导向轴43传动连接;当垃圾袋输送机构4输送垃圾袋时,送袋电机42驱动,送袋导向轴43带动垃圾袋挂轴44上的垃圾袋穿过送袋通槽221进入内桶体12;其中,两个送袋导向轴43的一端分别设有送袋从动轮45,两个送袋从动轮45啮合;送袋电机42的输出端连接有送袋驱动轮46,送袋驱动轮46与一送袋从动轮45啮合。
51.排气机构包括抽风机51、进风槽52和分流罩53;抽风机51设置在隔离层上,内桶体12的侧壁在抽风机51的一侧设有若干个分流槽54,分流槽54对应抽风机51 的大小设置;分流罩53对应分流槽54设置在内桶体12内,分流槽54设置在分流罩53内;进风槽52设置在内桶体12靠近抽风机51的一侧壁的下端,且进风槽52与分流罩53连通,进风槽52上设置有若干个沿进风槽52长度方向排布的进风通孔521。其中,外桶体11在抽风机51一侧的侧壁上设有排气通孔55;便于将内桶体12内的气体排出。
52.所述智能垃圾收集器的工作方法包括以下步骤:
53.s1、自动取袋、套袋;
54.s11、送袋电机42驱动两个送袋导向轴43转动,使得垃圾袋穿过送袋通槽221进入内桶体12内,当送袋电机42转动的时间达到预先设置的时间后停止转动;
55.s12、两个封口机构3上的伸缩电机31分别驱动两个伸缩机构,带动两个夹持件33箱数靠近,直至两夹持件33分别抵接在垃圾袋的两侧;在本实施例中,当两夹持件33抵接在垃圾袋的两侧时,此时两夹持件33分别位于垃圾袋开口的下侧;
56.s13、切袋电机71驱动切袋连杆73,使得刀片72切断垃圾袋;其中,随后切袋电机71反转,使得刀片72进入切袋凹槽222内,从而不会阻碍垃圾袋输送机构4后续输送垃圾袋;
57.s14、两个封口机构3上的伸缩电机31反转,带动夹持件33远离另一封口机构3,此时垃圾袋靠近开口的两侧分别粘贴在两夹持件33的粘胶条35上,从而打开垃圾袋;
58.s15、排气机构中的抽风机51启动,降低内桶体12底部的气压,便于打开垃圾袋;
59.其中,在进行步骤s1前,手动将垃圾袋挂轴44上的垃圾袋拉出并穿过两个送袋;
60.s2、通过检测机构自动打开或关闭第二翻盖22以及检测内桶体12内的垃圾是否装满;
61.s21、人体检测模块检测外桶体11外的预设范围内是否有人,若是,进入步骤s22;
62.s22、人体检测模块输送信号至控制模块,控制模块控制翻盖电机驱动,带动第二翻盖22转动,打开翻盖开口211;
63.s23、人体检测模块检测外桶体11外的预设范围内是否有人,若是,翻盖电机不转动,第二翻盖22保持打开状态;若否,进入步骤s24;
64.s24、控制模块控制翻盖电机驱动,带动第二翻盖22转动,盖合翻盖开口211;
65.s25、垃圾超限检测模块检测内桶体12内的垃圾高度是否超过预设的高度,若是,
控制模块控制语音模块播放预先设置的警报;
66.s3、通过紫外杀菌灯6杀菌;
67.s31、当第一翻盖21和第二翻盖22都处于闭合状态时,控制模块驱动紫外杀菌灯6工作;当翻盖电机驱动或第一翻盖21打开时,控制模块控制紫外杀菌灯6关闭;
68.s32、抽风机51持续工作,将内桶体12内的气体排出;
69.s4、封口机构3自动对垃圾袋打包封口;
70.s41、当垃圾超限检测模块检测到垃圾袋内的垃圾超出预设高度时,且第一翻盖21处于闭合状态时,两个封口机构3上的伸缩电机31分别驱动两个伸缩机构,带动两个夹持件33箱数靠近,直至两夹持件33分别抵接在垃圾袋的两侧;
71.s42、控制模块控制热封条34通电加热,使得垃圾袋加热封口;
72.s43、两个封口机构3上的伸缩电机31反转,带动夹持件33远离另一封口机构3,完成对垃圾袋的打包;
73.s44、打开第一翻盖21,将完成打包的垃圾袋取出。
74.上述方法,可通过垃圾袋输送机构4自动输送垃圾袋,每输送一个垃圾袋后,两封口机构3抵接夹持住垃圾袋,通过切袋机构将其切断;随后,由于两侧的粘胶条35已粘贴在垃圾袋开口的两侧,在两封口机构3收回时一同将垃圾袋打开,步骤紧凑;随后通过抽风机51降低内桶体12底部的气压,便于打开垃圾袋;这样,从取袋到套袋的动作中,都无需人工调节垃圾袋,使用方便;当检测到外桶体11外有人靠近,控制模块控制翻盖电机打开第二翻盖22,便于使用者扔垃圾;另外,当只有在开盖后垃圾收集器才会发出垃圾已装满的报警,提醒人们不要继续投入垃圾;当第一翻盖21和第二翻盖22都处于闭合状态时,控制模块驱动紫外杀菌灯6工作,对内桶体12进行杀菌;同时抽风机51持续工作,防止垃圾袋内的垃圾发臭;通过垃圾超限检测模块检测到垃圾装满后,两个封口机构3将垃圾袋夹持住,通电加热热封条34,使得垃圾袋加热封口,完成对垃圾袋的打包;这样,取垃圾袋、套设垃圾袋和打包垃圾袋的动作都无需人工参与,还能通过紫外杀菌灯6对内桶体12进行杀菌,减少内桶体12内产生的异味和细菌。
75.紫外线灯条的发光方向倾斜朝向内桶体12设置;进一步地,第一翻盖21在靠近内桶体12的一侧还设有照明光源61,其中照明光源61为led灯条。
76.其中,在步骤s31中,还可以通过控制模块结合机器深度学习系统,能根据垃圾收集器在每个时间段开盖的频率总结出使用者的生活规律,样可以尽量避免紫外线消毒会影响使用者的日常使用;在使用频率较低的时间段开启紫外杀菌灯6消毒;开启时间设定为10min-15min,消毒完成后,内桶体12底部排气机构开启,消毒完成。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。