1.本实用新型涉及检测试卡拼装设备技术领域,特别是涉及一种检测试卡全自动化高速组装检测一体设备。
背景技术:
2.检测试卡主要是用于早孕、排卵检测,检测试卡通常由上注塑片、下注塑片以及设置在两者中间的检测试条组装而成;
3.现有的检测试卡在进行拼装时,机械臂通常只能对注塑片进行夹取,而注塑片质量较轻,则难免会出现夹取失败的情况,为此我们提出一种检测试卡全自动化高速组装检测一体设备。
技术实现要素:
4.为了克服现有技术的不足,本实用新型提供一种检测试卡全自动化高速组装检测一体设备,能让拼装机械手臂在拥有普通的抓取能力的同时,可以利用负压来吸取住物料,从而让物料与拼装机械手臂之间的连接更加稳固以及紧密,使得检测试卡的拼装作业能以更低的出错概率完成,有效提升装置的实用性。
5.为解决上述技术问题,本实用新型提供如下技术方案:一种检测试卡全自动化高速组装检测一体设备,包括主框架、传动带、试纸存放台、外壳存放台、压合组件、拼装机械手臂与吸附机构,吸附机构包括
6.吸风嘴,所述吸风嘴位于拼装机械手臂抓取部位内侧;
7.负压真空室与电机室,所述负压真空室位于拼装机械手臂外侧,所述电机室位于负压真空室外侧;
8.风管,所述风管连接吸风嘴与负压真空室;
9.出风口,所述出风口位于电机室的排出口。
10.作为本实用新型的一种优选技术方案,所述试纸存放台与外壳存放台均位于传动带顶端表面,所述拼装机械手臂位于外壳存放台顶端表面,所述压合组件位于主框架底端表面,所述外壳存放台与拼装机械手臂和吸附机构都设置有两个。
11.作为本实用新型的一种优选技术方案,所述出风口末端外侧活动连接有滤尘盖,所述滤尘盖直径为出风口直径的1.1倍。
12.作为本实用新型的一种优选技术方案,所述风管与负压真空室的接口处设置有滤尘网,所述滤尘网与风管之间为可拆卸连接。
13.作为本实用新型的一种优选技术方案,还包括观测机构,所述观测机构包括智能观测主体,所述智能观测主体位于主框架一侧表面,所述智能观测主体一侧表面设置有伸缩杆,所述伸缩杆另一端端面设置有摄像头,且所述智能观测主体包括图像拍摄模块、数据存储模块、中央处理模块、控制模块、数据记录模块与语音提醒模块,所述图像拍摄模块的输出端电连接于中央处理模块的输入端,所述数据存储模块的输入端电连接于中央处理模
块的输出端,所述中央处理模块的输出端电连接于数据记录模块、控制模块与语音提醒模块的输入端,所述控制模块电连接有去残次品用机械臂。
14.作为本实用新型的一种优选技术方案,所述伸缩杆与摄像头的数量均设置有两个,且所述摄像头与伸缩杆之间为可拆卸连接。
15.与现有技术相比,本实用新型能达到的有益效果是:
16.1、通过设置的吸附机构,能让拼装机械手臂在拥有普通的抓取能力的同时,可以利用负压来吸取住物料,从而让物料与拼装机械手臂之间的连接更加稳固以及紧密,使得检测试卡的拼装作业能以更低的出错概率完成,有效提升装置的实用性;
17.2、通过设置的检测机构,让智能观测主体可以利用摄像头来探取拼装完毕的检测试卡的完成度,从而减去人工检查这一步骤,进一步节省人力物力。
附图说明
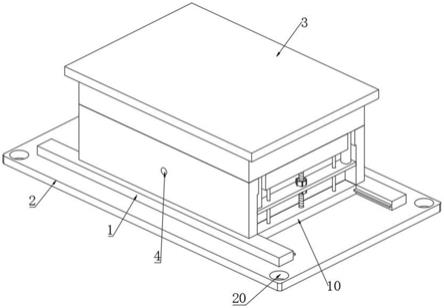
18.图1为本实用新型的结构示意图;
19.图2为本实用新型的图1中a处的放大结构示意图;
20.图3为本实用新型的图1中b处的放大结构示意图;
21.图4为本实用新型的智能观测机构系统结构示意图;
22.其中:1、主框架;2、传动带;3、试纸存放台;4、外壳存放台;5、智能观测主体;11、压合组件;41、拼装机械手臂;42、吸风嘴;43、风管;44、负压真空室;45、电机室;46、出风口;47、滤尘盖;51、伸缩杆;52、摄像头;501、图像拍摄模块;502、数据存储模块;503、中央处理模块;504、控制模块;505、数据记录模块;506、语音提醒模块。
具体实施方式
23.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本实用新型,但下述实施例仅仅为本实用新型的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其它实施例,都属于本实用新型的保护范围。下述实施例中的实验方法,如无特殊说明,均为常规方法,下述实施例中所用的材料、试剂等,如无特殊说明,均可从商业途径得到。
24.实施例1:
25.如图1-图2所示,一种检测试卡全自动化高速组装检测一体设备,包括主框架1、传动带2、试纸存放台3、外壳存放台4、压合组件11、拼装机械手臂41与吸附机构,吸附机构包括吸风嘴42,吸风嘴42位于拼装机械手臂41抓取部位内侧;负压真空室44与电机室45,负压真空室44位于拼装机械手臂41外侧,电机室45位于负压真空室44外侧;风管43,风管43连接吸风嘴42与负压真空室44;出风口46,出风口46位于电机室45的排出口;试纸存放台3与外壳存放台4均位于传动带2顶端表面,拼装机械手臂41位于外壳存放台4顶端表面,压合组件11位于主框架1底端表面,外壳存放台4与拼装机械手臂41和吸附机构都设置有两个;
26.在需组装时时,首先启动电机室45内的其中一台电机,将负压真空室44抽成负压,从而使得压力通过风管43与吸风嘴42吸取到下注塑片,让下注塑片更好的被拼装机械手臂41夹取,然后将夹取的下注塑片放置在传动带2表面的安装台上,然后机械手臂41再将试纸
存放台3上的试纸吸附,然后放置在下注塑上,然后启动另一个机械手臂41吸取上注塑片,放置在下注塑片以及试纸上面,接着启动压合组件对上注塑片进行压合,压合完成后传动带2带动安装台移动至打包区;能让拼装机械手臂41在拥有普通的抓取能力的同时,可以利用负压来吸取住物料,从而让物料与拼装机械手臂41之间的连接更加稳固以及紧密,使得检测试卡的拼装作业能以更低的出错概率完成,有效提升装置的实用性。
27.在其他实施例中,本实施例公开了,请如图2所示,出风口46末端外侧活动连接有滤尘盖47,滤尘盖47直径为出风口46直径的1.1倍;通过该设计,使得电机室45排出的风不会带有灰尘,影响到检测试卡组装。
28.在其他实施例中,本实施例公开了,请如图2所示,风管43与负压真空室44的接口处设置有滤尘网,滤尘网与风管43之间为可拆卸连接;通过该设计,让灰尘可以被拦截,同时可以随时进行清理。
29.实施例2:
30.在其他实施例中,本实施例公开了,请如图1、图3、图4所示,还包括观测机构,观测机构包括智能观测主体5,智能观测主体5位于主框架1一侧表面,智能观测主体5一侧表面设置有伸缩杆51,伸缩杆51另一端端面设置有摄像头52,且智能观测主体5包括图像拍摄模块501、数据存储模块502、中央处理模块503、控制模块504、数据记录模块505与语音提醒模块506,图像拍摄模块501的输出端电连接于中央处理模块503的输入端,数据存储模块502的输入端电连接于中央处理模块503的输出端,中央处理模块503的输出端电连接于数据记录模块505、控制模块504与语音提醒模块506的输入端,控制模块504电连接有去残次品用机械臂;
31.摄像头52对物料进行拍照,并通过图像拍摄模块501传输到中央处理模块503中,中央处理模块503将照片与数据存储模块502中存储的多角度照片进行对比,若发现物料拼装不当时,传输指令到语音提醒模块506与数据记录模块505,语音提醒模块506产生声音提示,数据记录模块505则记录数字进行统计,同时发送指令给控制模块504,控制模块504操控去残次品用机械臂将残次的物料取下;让智能观测主体5可以利用摄像头52来探取拼装完毕的检测试卡的完成度,从而减去人工检查这一步骤,进一步节省人力物力。
32.在其他实施例中,本实施例公开了,请如图1所示,伸缩杆51与摄像头52的数量均设置有两个,且摄像头52与伸缩杆51之间为可拆卸连接;通过该设计,能多角度多方位对物料进行拍摄,更便于检查物料完整性,同时在摄像头52发生故障时,便于使用者将其拆下维修。
33.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本实用新型宗旨的前提下还可以作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。