1.本发明属于碰撞检测技术领域,具体涉及一种自行走设备碰撞检测装置。
背景技术:
2.自行走设备中,特别是一些割草机器人、清扫机器人设备,均设置有碰撞检测装置,用于感知机器是否发生碰撞,一些碰撞检测装置还可以检测到设备外壳碰撞点的具体方向,现在常用的碰撞结构多是通过设置活动的外壳体,外壳体与机身之间存在相对位移,通过接触开关、霍尔传感器等手段检测外壳体和设备之间的相对位移,完成碰撞检测。
3.如图1-7所示,一种带有抬起检测结构的自动行走设备,包括:行走设备主体2和覆盖在其外部的壳体1,所述行走设备主体2包括行走单元用于带动设备实现行进、转向等动作;包括功能单元用于实现相关功能,本实施例以割草机器人为例,行走设备主体2上包括切割单元用于切割草体。
4.行走设备主体2上设置有第一连接座3和第二连接座4,第一连接座3设置于行走设备主体2后部,第二连接座4设置于行走设备主体2前部,第一连接座3和第二连接座4各有两个。第二连接座4可以进行伸缩。壳体1与行走设备主体2通过第一连接座3和第二连接座4进行连接,壳体1头部可以在为外力作用下与主体2发生相对位移。
5.具体的,主体2为由底座201和机身上壳202组成的内部中空的封闭腔体。
6.图3-7所示为第一连接座3的具体结构,第一连接座3包括座体6,和套接在座体6上的摆动杆8,摆动杆8上端部为连接球头座9,球头座9可以与壳体进行连接,摆动杆8外部套接有柔性套7,柔性套7底部设置有柔性底座701,柔性底座701通过压环5抵压在座体6上,压环5上设置有安装孔501,摆动杆8包括主体杆件801,主体杆件801上设置有连接底座802,连接底座802位于座体6和柔性底座701之间,主体杆件801下端设置有检测杆803,检测杆803端部设置有安装部804,安装部804上可拆卸连接有被检测元件10。
7.图5-6所示为上述第一连接座3在主体2上的安装结构。本实施例中,第一连接座3安装在机身上壳202上,根据主体2的具体结构不同,第一连接座3可以连接在主体2上的不同位置。机身上壳202上设置有安装座11。如图10所示,第一连接座3安装在机身上壳202上,压环5通过螺栓固定在机身上壳202上。
8.如图7所示,第一连接座3安装在机身上壳202上,压环5通过螺栓固定在机身上壳202上。安装座11底部安装有检测元件12。在机器运行过程中,机器外壳1碰撞到物体后,外壳1与主体2之间发生相对位移,外壳1带动摆动杆8以连接底座802为支点进行摆动,摆动过程中被检测元件10与检测元件12之间发生相对位移,通过检测位移的移动方向、距离等参数,可以获得外壳1碰撞位置、碰撞程度等参数。具体的,被检测元件10可以是磁体,检测元件12可以是霍尔传感器。
9.现有技术的上述结构可以实现外壳1的碰撞检测,但采用磁性传感器作为检测装置,且被检测装置直接设置在摆动杆8下端,摆动杆8的任何摆动,均会被检测。在机器实际运行过程中,由于割草机多在户外,工作路面多是草地,实际工况较为复杂,机身运行起伏、
颠簸较多,外壳1和机体2由于是活动连接,在没有发碰撞,正常运行的情况下,两者也会发生一些轻微的相对位移,检测元件12检测到的被检测元件10的微小位移也可能被误判为机器发生碰撞,导致过度检测,会影响机器正常运行。如果利用算法对检测元件12所检测到的被检测元件10的微小位移进行过滤,则需要检测元件12可以检测出被检测元件10的具体位移,而现有的霍尔传感器等元件,无法实现高精度的位移测量。
技术实现要素:
10.为了克服现有技术的不足,本发明提出一种自行走设备碰撞检测装置。
11.实现本发明目的的技术解决方案为:
12.一种自行走设备碰撞检测装置,所述自行走设备包括设备主体和覆盖在设备主体外部的壳体,所述检测装置包括摆动杆和检测组件,所述检测组件连接于设备主体上,所述摆动杆上端连接于所述壳体,当设备主体与壳体之间发生位移时,所述摆动杆会发生摆动,
13.所述摆动杆的下端设置有安装部,所述安装部伸入所述检测组件内且与所述检测组件内表面有一定距离,所述检测组件能够检测出所述安装部接触所述检测组件内表面时的碰撞信号。
14.进一步地,所述摆动杆包括主体杆件和检测杆,所述主体杆件下端设置有连接球头槽,所述检测杆上端设置有连接球头,所述连接球头嵌入连接球头槽内。
15.进一步地,所述检测装置还包括座体和柔性套,所述座体连接于设备主体上,所述座体内部具有一通孔,所述摆动杆下端自所述座体的通孔下部开口穿出,所述柔性套套设于主体杆件外,所述柔性套底部设置有柔性底座,所述主体杆件上设置有连接底座,所述连接底座位于所述座体和所述柔性底座之间。
16.进一步地,所述摆动杆还包括一弹性复位杆,所述主体杆件和检测杆上分别设置有复位杆槽,复位杆槽分别位于连接球头槽内和连接球头端部,所述复位杆上下端分别位于主体杆件和检测杆上的复位杆槽内。
17.进一步地,还包括与设备主体固定连接的安装座,所述安装座下端为环形的安装台,所述检测组件通过卡扣或粘结的形式安装于安装台上。
18.进一步地,所述安装台上设置有多个安装卡口,多个安装卡口的设置位置不对称和/或至少有两个安装卡口的宽度或深度不一样,所述检测组件的外部与安装卡口对应的位置设置有安装凸起。
19.进一步地,所述检测组件的内壁为检测面,所述检测面采用压力传感器或电容传感器检测所述安装部接触所述检测组件检测面时的碰撞信号。
20.进一步地,所述检测组件为环形结构,所述安装部为球体。
21.进一步地,所述检测组件包括外壳体,外壳体内部具有安装腔体,安装腔体内设置有多个检测元件,多个检测元件的检测头均匀分布在外壳体内壁。
22.进一步地,安装腔体内设置电路板,检测元件安装在电路板上。
23.进一步地,检测元件为压力传感器或接触开关。
24.进一步地,安装腔体内设置有用于电路板定位的定位筋板和用于定位、安装检测元件的安装口。
25.本发明与现有技术相比,其显著优点在于:
26.1、摆动杆的下端设置有安装部,安装部伸入检测组件内且与所述检测组件内表面有一定距离(例如检测组件为环形结构,安装部为球体),检测组件能够检测出安装部接触检测组件内表面时的碰撞信号,当机器晃动过小时,安装部不会接触到检测组件内壁检测面,可以避免过小的晃动,触发碰撞检测,进而避免过度检测;
27.2、所述检测组件包括外壳体,外壳体内部具有安装腔体,安装腔体内设置有多个检测元件,多个检测元件的检测头均匀分布在外壳体内壁,机器运行过程中,摆动杆如果发生摆动,安装部接触到检测元件时,即可通过电信号获知外壳与机体之间发生了相对位移,进而判定机器发生碰撞,并且可根据安装部接触到的检测元件相对于检测组件中轴线的位置,可以判断出外壳上的大致碰撞位置。
附图说明
28.图1:现有技术自行走设备整体结构示意图。
29.图2:现有技术自行走设备结构拆分图。
30.图3:现有技术第一连接座结构示意图。
31.图4:现有技术第一连接座结构剖视图
32.图5:现有技术第一连接座在主体上的安装示意图。
33.图6:现有技术第一连接座在自行走设备上的安装示意图。
34.图7:现有技术第一连接座局部放大图。
35.图8:本发明自行走设备碰撞检测装置部分结构拆分图。
36.图9:图8中部分结构示意图。
37.图10:摆动杆结构拆分图。
38.图11:本发明自行走设备碰撞检测装置剖视图。
39.图12:摆动杆结构示意图。
40.图13:检测组件安装示意图。
41.图14:安装座结构示意图。
42.图15:检测组件第二实施例结构示意图。
43.图16:检测组件第二实施例内部结构图。
44.图17:检测组件第二实施例结构拆分图。
45.图18:第二实施例中安装部未接触检测元件示意图。
46.图19:第二实施例中安装部接触一个检测元件示意图。
47.图20:第二实施例中安装部接触两个检测元件示意图。
具体实施方式
48.一种自行走设备碰撞检测装置,所述自行走设备包括设备主体2和覆盖在设备主体2外部的壳体1,所述检测装置包括摆动杆8和检测组件13,所述检测组件13连接于设备主体2上,所述摆动杆8上端连接于所述壳体1,当设备主体2与壳体1之间发生位移时,所述摆动杆8会发生摆动,
49.所述摆动杆8的下端设置有安装部,所述安装部伸入所述检测组件13内且与所述检测组件13内表面有一定距离,所述检测组件13能够检测出所述安装部接触所述检测组件
13内表面时的碰撞信号。
50.具体地,结合图10-11,所述摆动杆8包括主体杆件801和检测杆803,所述主体杆件801下端设置有连接球头槽805,所述检测杆803上端设置有连接球头806,所述连接球头806嵌入连接球头槽805内,连接后的检测杆803可以相对于主体杆件801向任意方向摆动。
51.具体地,所述检测装置还包括座体6和柔性套7,所述座体6连接于设备主体2上,所述座体6内部具有一通孔,所述摆动杆8下端自所述座体6的通孔下部开口穿出,所述柔性套7套设于主体杆件801外,所述柔性套7底部设置有柔性底座701,所述主体杆件801上设置有连接底座802,所述连接底座802位于所述座体6和所述柔性底座701之间。
52.具体地,所述摆动杆8还包括一弹性复位杆807,所述主体杆件801和检测杆803上分别设置有复位杆槽,复位杆槽分别位于连接球头槽805内和连接球头806端部,所述复位杆807上下端分别位于主体杆件801和检测杆803上的复位杆槽内。
53.对于检测组件13的具体实现方案,以下给出两种具体实施例:
54.实施例1
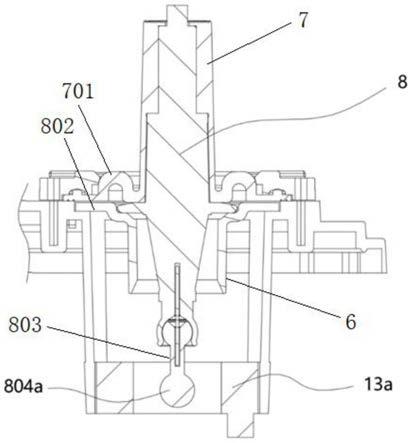
55.如图8-11所示,安装座11下端为环形的安装台1101,检测装置13a装入安装台1101内。本实施例中,检测装置13a为环形结构,其内壁为检测面,检测装置13a上设置有接口1301用于与机器内电子系统连接。检测装置13a可以通过卡扣、粘结等形式安装在安装台1101上,本实施例中,检测装置13a通过注胶粘结的方式安装,检测装置13a外壁设置有纹路、键槽等结构,使安装更紧密,且容易进行定位。
56.结合图10-11,摆动杆8包括主体杆件801,主体杆件801上设置有连接底座802,连接底座802位于座体6和柔性底座701之间,主体杆件801下端活动连接有检测杆803,检测杆803端部设置有安装部804a,本方案中,安装部804a不再需要安装被检测装置,安装部804a本身即为被检测装置。安装部804a可以是球体或者其他形状。
57.检测组件13a内壁为检测面,检测面可以是压力传感器检测头、例如柔性薄膜压力传感器。当安装部804a接触到检测面时,即可通过电信号获知外壳与机体之间发生了相对位移,进而判定机器发生碰撞。柔性薄膜压力传感器同样可以检测到安装部804a与其接触的具体位置,进而可以判定外壳相对于机身的移动方向,获得碰撞位置的相关信息。同样,为了避免在外壳和机身相对位移过大时,摆动杆摆动幅度过大,安装部804a对检测组件13a内壁产生过大的压力,这里摆动杆8也采用下端检测杆803与主体杆件801活动连接的形式。
58.检测组件13a具体的还可以采用其他检测形式,例如采用电容传感器,安装部804a为可以触发电容传感器的材料或者其表面包覆有可以触发电容传感器的材料。804a接触检测面,触发电容传感器,即可通过电信号获知外壳与机体之间发生了相对位移,进而判定机器发生碰撞。
59.图12所示为安装部804b为其他形状的示例。本实施例中,由于安装部804a位于检测组件13a中间,安装部804a与检测组件13a内壁检测面具有一定距离,当机器晃动过小时,安装部804b不会接触到检测组件13a内壁检测面,可以避免过小的晃动,触发碰撞检测,进而避免过度检测。
60.实施例2
61.本实施例中,提供另一种检测组件13b的结构。如图13-14所示,安装台1101上设置有安装卡口1102,安装卡口1102上设置有卡口等结构。安装卡口1102一方面用于给检测组
件13b固定,另一方面起到对检测组件进行定位的作用,由于需要对碰撞方向进行判定,所述检测组件13b本身需要固定安装位置,或者说是具有基准安装位置,通过设置安装卡口1102,可以帮助确定基准安装位置,为了保证安装位置唯一,避免错装,可以设置不对称的安装卡口1102,具体到图14中,图中两个安装卡口1102可以设置不一样的宽度或者深度。
62.检测组件13b结构如图15-17所示,其包括外壳体1302,外壳体1302外部对于安装卡口1102位置设置有安装凸起1303,外壳体1302内部具有腔体,腔体内设置有检测元件1306,检测元件1306的检测头均匀分布在外壳体1302内壁,检测元件1306可以通过注胶的方式固定在外壳体1302内。图15中,1307为注胶体。
63.移除注胶体1307后,检测组件13b结构如图16-17所示,外壳体1302内部具有安装腔体1304,安装腔体1304内设置电路板1305,检测元件1306安装在电路板1305上。
64.如图17所示,安装腔体1304内设置有用于帮助电路板1305定位的定位筋板1308,和用于定位/安装检测元件1306的安装口1309。具体的,本实施例中,检测元件1306设置有8个,均匀分布在检测装置13b的内壁,当然,检测元件1306也可以设置为其他数量。
65.本实施例中,检测元件1306具体可以为压力传感器、接触开关等。机器运行过程中,摆动杆8如果发生摆动,安装部804a接触到检测元件1306时,即可通过电信号获知外壳与机体之间发生了相对位移,进而判定机器发生碰撞。具体的碰撞方向的判定,通过下面附图进行说明。
66.如图18-20三图所示,提供了本装置的碰撞检测方法:图18中,为机器平稳运行状态,安装部804不接触检测元件1306,安装部804与检测元件1306之间具有一定距离,当机器晃动过小时,安装部804不会接触到检测元件1306,可以避免过小的晃动,触发碰撞检测,进而避免过度检测。
67.图19中,安装部804触碰到一个检测元件1306,通过所接触的检测元件1306相对于检测组件13b中轴线的位置,可以判断出外壳上的大致碰撞位置。
68.图20中,安装部804触碰到多个检测元件1306,可以选取多个检测元件1306的中间位置作为基准点,通过基准点相对于检测组件13b中轴线的位置,可以判断出外壳上的大致碰撞位置。
69.对于本方案中的机器,具有两个第一连接座,即设置有两个检测组件,可以在获得两个检测组件的碰撞方向后,进行矢量计算,得到整机的碰撞方向。
70.以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。