1.本发明涉及一种基于域控制器的模块化无人驾驶故障诊断系统,属于自动驾驶技术领域。
背景技术:
2.无人驾驶汽车是以传统汽车为基础,融合多种传感器,如激光雷达、毫米波雷达和相机等,为一体的智能化车辆。随着车辆上传感器和控制单元数量的增加,虽可实现越来越多的智能驾驶功能,但车身质量、线束长度及复杂度和整车架构复杂度等也会急剧增加,不仅影响车辆动力性和经济性,也必然带来诸多不确定的潜在风险。
3.无人驾驶汽车传感器用于实现障碍物探测,帮助车辆感知周围环境,并且对融合、规划控制功能具有重大影响。目前多数无人驾驶汽车尚未对各传感器进行诊断检测,无法获得传感器的工作状态,在传感器出现故障时,无法做出正确决策,使车辆的自动驾驶具有极大风险,且在售后阶段无法快速定位故障问题,影响车辆的维修效率。即使部分无人驾驶汽车对传感器进行了诊断设计,但仅零散分布于各控制芯片,而没有进行整体诊断设计,容易在实际开发过程中出现遗漏诊断项、故障响应管理混乱等问题,最终导致决策失误。
技术实现要素:
4.本发明的目的是解决目前无人驾驶汽车传感器诊断及故障响应功能缺失的技术问题。
5.为实现上述发明目的,本发明提供一种基于域控制器的模块化无人驾驶故障诊断系统,包括微控制器,所述微控制器属于域控制器的一部分,并适于与所述域控制器的其他部分之间交互故障诊断信息,所述故障诊断信息至少包括传感器故障诊断信息;所述微控制器的软件架构包括应用层和基础层,所述应用层中包括故障诊断单元和规控单元,所述规控单元适于根据所述故障诊断单元提供的故障等级信息进行故障响应,作出是否抑制adas相关功能的决策。
6.进一步地,所述域控制器的其他部分包括至少两个系统级芯片,其中一个系统级芯片适于提供环视相机的故障诊断信息,另一个系统级芯片适于提供前视相机的故障诊断信息。
7.进一步地,所述故障诊断单元包括多个故障诊断模块和故障协调模块,所述故障协调模块适于统一收集各所述故障诊断模块输出的故障诊断信息。
8.进一步地,多个所述故障诊断模块至少包括相机诊断模块和雷达诊断模块;所述相机诊断模块用于前视相机和环视相机的故障诊断,所述雷达诊断模块用于激光雷达、毫米波雷达和超声波雷达的故障诊断。
9.进一步地,还包括线路诊断模块,用于对各传感器短接到电源、短接到地和开路的故障诊断。
10.进一步地,还包括供电诊断模块,用于对各传感器以及所述域控制器的供电电压
过高和/或过低的故障诊断。
11.进一步地,还包括芯片诊断模块,用于所述域控制器中各芯片的内存故障和/或超温故障的故障诊断。
12.进一步地,还包括通信诊断模块,用于can网络、以太网和spi总线的通信故障诊断。
13.进一步地,所述微控制器的软件架构还包括基础层,所述基础层适于存储来自所述故障诊断单元的故障诊断信息并以故障码标识,以便通过读取故障码来快速定位故障。
14.进一步地,获得的故障诊断信息以故障标志位标识。
15.与现有技术相比,本发明的有益效果为:
16.1、能实时监控无人驾驶汽车运行状态,在车辆出现故障后及时定位故障原因并进行故障响应,保障车辆及人员安全。
17.2、采用模块化的软件架构使功能更加清晰、具体,同时便于对故障响应进行统一规划。
18.3、基于域控制器和模块化开发的无人驾驶诊断算法软件架构可以减少车辆控制器的数量、降低车身线束的长度和重量,从而保证车辆的动力性和经济性。
19.4、基于模块化开发的诊断算法可以避免诊断项的缺失,进行正确的故障响应以在传感器出现问题时有效保障车辆和人员安全,可以通过诊断仪读取故障状态,提高维修效率。
附图说明
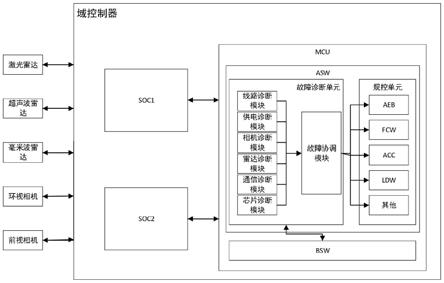
20.图1是本发明一个实施例的原理框图。
具体实施方式
21.下面结合附图和具体实施例,对本发明的技术方案做进一步说明。
22.如图1所示,本发明基于域控制器的模块化无人驾驶故障诊断系统的一个实施例,域控制器中包括两个系统级芯片soc(system on chip)和一个微控制器芯片mcu(microcontroller unit)。两个系统级芯片soc可以分别接收前视相机和环视相机的信号,并且进行相应的算法开发和相关诊断功能开发,同时和微控制器芯片mcu进行相应信息交互。soc1(tda):主要用于环视相机功能开发,并且会提供环视相机的故障诊断信息。soc2(j2):主要用于前视相机功能开发,并且会提供前视相机的诊断故障信息。相机故障包括两部分:soc提供的相机故障和mcu进行的相机故障。两种芯片负责不同的相机故障诊断内容。如,soc会提供相机遮挡、强光等故障信息,mcu会提供绿图故障、图片时序故障等,同时,soc只会提供对应的故障信息,mcu会将对应的故障信息记录成故障码或dtc码,方便维修时读取定位故障。三个雷达的故障信息通过mcu里面的逻辑进行判断是否发生故障。
23.微控制器芯片mcu的应用层asw(applications software)建立诊断功能单元,按照故障类型及模块化设计原则将诊断单元细分线路诊断、供电诊断、相机诊断、雷达诊断、通信诊断、芯片诊断和故障协调模块,各个诊断模块实现诊断功能如下:
24.线路诊断:完成各个传感器短接到电源、短接到地和开路的故障诊断。
25.供电诊断:完成各个传感器以及控制芯片的供电过高、过低的故障诊断。
26.相机诊断:完成前视相机和环视相机的故障诊断。
27.雷达诊断:完成激光雷达、毫米波雷达、超声波雷达的故障诊断。
28.通信诊断:完成控制器局域网总线can(controller area network)网络、以太网、串行外围设备接口总线spi(serial peripheral interface)通信的故障诊断。
29.芯片诊断:完成mcu、soc芯片的内存故障、超温故障等的故障诊断。
30.故障协调模块:接收来自上述故障模块的故障标志位以及can信息中的故障信息传递到规控单元中的adas(advanced driving assistance system,高级驾驶辅助系统)功能单元,如自动紧急制动aeb(autonomous emergency braking)、前方碰撞预警fcw(forward collision warning)、自适应巡航acc(adaptive cruise control)、车道偏离预警ldw(lane departure warning)等进行故障响应,当达到设定的故障等级时抑制adas相关功能,以便进行人工干预,保证人车安全。
31.具体地,故障等级根据故障类型,如传感器故障、芯片故障等,以及发生故障后对车辆功能的影响程度进行划分,如影响车辆正常行驶,会造成人身和车辆损害的,则故障等级为高,如芯片故障和供电故障。如对人身和车辆的安全影响适中,车辆依然可以行驶,则故障等级为中,如超声波雷达传感器故障。如对车辆安全运行影响小,故障等级为低,如通信故障中部分信号的有效性故障。
32.至于在什么情况下抑制adas相关功能,举例来说,当发生前视相机电路故障时,会抑制或阻止依赖于前视相机的adas相关功能,如acc、aeb、fcw等功能被抑制。当前视相机电路故障排除后,则自动恢复相应功能。
33.故障标志位和故障码两者不同。故障标志位是内部逻辑计算判断出有故障的时候,会使故障标志位置位(赋值为1),但是故障标志位置位后,并不意味着存储了故障码,故障标志位置位后,还需要调用相关api(函数接口),才能存储故障码,故障诊断仪只能读取故障码,不能读取故障标志位。
34.本实施例中,通过将多个控制芯片集成到一个域控制器,减少了车辆控制器的数量,相应也会减少车身线束的长度和重量。基于模块化设计思想将故障类型进行分类,并且在微控制器mcu中进行集中管理,使诊断相关项不会缺失,通过故障协调模块统一进行故障响应,确保车辆发生故障时能够做出正确决策,保障车辆和人员的安全。通过诊断单元和基础软件层bsw(basic software)的交互,将故障进行存储,维修人员可以通过诊断仪读取故障码以快速定位故障,提高维修效率。
35.本实施例中,通过该基于域控制器和模块化开发的无人驾驶诊断算法软件架构可以减少车辆控制器的数量、车身线束的长度和重量,从而提供车辆的动力性和经济性。基于模块化开发的诊断算法可以避免诊断项的缺失,进行正确的故障响应以保障在传感器出现问题时有效保障车辆和人员安全,可以通过诊断仪读取故障状态,提高维修效率。
36.为了便于理解本发明的上述实施例,下面对每一种类别的故障类型,举一个具体的故障进行说明。
37.线路诊断模块:当前视相机线路发生stb(short to battery)故障时,故障标志位vsoutd_frtcmrstbdiagdata.tstfailed置位,故障等级为高vsoutd_frtscmrstbdiagdata.priority等于high,同时对应故障码5b3312可以通过canoe软件读出,故障状态为09,故障协调模块中变量vbfltmu_fcmrnoavbl会置位,同时acc、aeb和fcw的
抑制标志位会置位,分别为vefltmu_acc_faultstatus、vefltmu_aeb_faultstatus、vefltmu_fcw_faultstatus,对应acc、aeb、fcw功能被抑制。
38.供电诊断模块:当域控制器发生供电过高故障时,故障标志位vspwrd_battvolthidiagdata.tstfailed置位,故障等级为高vspwrd_battvolthidiagdata.priority等于high,同时对应故障码900117可以通过canoe软件读出,故障状态为09,故障协调模块中变量vbfltmu_ubatterr会置位,同时acc、aeb、fcw和ldw的抑制标志位会置位,分别为vefltmu_acc_faultstatus、vefltmu_aeb_faultstatus、vefltmu_fcw_faultstatus、vefltmu_ldw_faultstatus,对应acc、aeb、fcw,ldw功能被抑制。
39.相机诊断模块(前视相机):当前视相机发生遮挡故障时,故障标志位vscmrd_fcmrblockagediagdata.tstfailed置位,故障等级为高vscmrd_fcmrblockagediagdata.priority等于high,同时对应故障码5b1c11可以通过canoe软件读出,故障状态为09,故障协调模块中变量vbfltmu_fcmrnoavbl会置位,同时acc、aeb、fcw和ldw的抑制标志位会置位,分别为vefltmu_acc_faultstatus、vefltmu_aeb_faultstatus、vefltmu_fcw_faultstatus、vefltmu_ldw_faultstatus,对应acc、aeb、fcw,ldw功能被抑制。
40.相机诊断模块(环视相机):当左侧视相机发生图像无效故障时,故障标志位vscmrd_lscmrimginvlddiagdata.tstfailed置位,故障等级为高vscmrd_lscmrimginvlddiagdata.priority等于high,同时对应故障码5b1d11可以通过canoe软件读出,故障状态为09,故障协调模块中变量vbfltmu_lscmrnoavbl会置位,fcw抑制标志位会vefltmu_fcw_faultstatus置位,对应fcw功能被抑制。
41.雷达诊断模块(激光雷达):当激光雷达发生遮挡故障时,故障标志位vsrdad_lidarblockagediagdata.tstfailed置位,故障等级为高vsrdad_lidarblockagediagdata.priority等于high,同时对应故障码5b2e11可以通过canoe软件读出,故障状态为09,故障协调模块中变量vbfltmu_lidarnoavbl会置位,同时acc、aeb的抑制标志位会置位,分别为vefltmu_acc_faultstatus、vefltmu_aeb_faultstatus,对应acc、aeb、功能被抑制。
42.雷达诊断模块(毫米波雷达):当毫米波雷达发生温度异常故障时,故障标志位vsrdad_millimetertempdiagdata.tstfailed置位,故障等级为高vsrdad_millimetertempdiagdata.priority等于high,同时对应故障码5b2711可以通过canoe软件读出,故障状态为09,故障协调模块中变量vbfltmu_millimeternoavbl会置位,同时acc、aeb、fcw的抑制标志位会置位,分别为vefltmu_acc_faultstatus、vefltmu_aeb_faultstatus、vefltmu_fcw_faultstatus,对应acc、aeb、fcw功能被抑制。
43.雷达诊断模块(超声波雷达):当超声波雷达发生余波过短故障时,故障标志位vsrdad_ultrsnc_wvaftshkshort.tstfailed置位,故障等级为高vsrdad_ultrsnc_wvaftshkshort.priority等于high,同时对应故障码5b2229可以通过canoe软件读出,故障状态为09,故障协调模块中变量vbfltmu_ultrsncnoavbl会置位,同时自动泊车apa(auto parking asist)的抑制标志位vefltmu_apa_faultstatus会置位,对应apa功能被抑制。
44.通信诊断模块:当epb(electrical park brake)节点发生节点丢失超时故障时,
故障标志位vscand_epb_msgtimeoutdiagdata.tstfailed置位,故障等级为高vscand_epb_msgtimeoutdiagdata.priority等于high,同时对应故障码c12887可以通过canoe软件读出,故障状态为09,故障协调模块中变量vbfltmu_cand_epb_signalerr会置位,同时acc、aeb、fcw的抑制标志位会置位,分别为vefltmu_acc_faultstatus、vefltmu_aeb_faultstatus、vefltmu_fcw_faultstatus,对应acc、aeb、fcw功能被抑制。
45.芯片诊断模块:当微控制器发生芯片超温故障时,故障标志位vscond_hrdwovrtmpfaultdiagdata.tstfailed置位,故障等级为高vscond_hrdwovrtmpfaultdiagdata.priority等于high,同时对应故障码5b1e4b可以通过canoe软件读出,故障状态为09,故障协调模块中变量vbfltmu_controllerinternalfault会置位,同时acc、aeb、fcw和ldw的抑制标志位会置位,分别为vefltmu_acc_faultstatus、vefltmu_aeb_faultstatus、vefltmu_fcw_faultstatus、vefltmu_ldw_faultstatus,对应acc、aeb、fcw,ldw功能被抑制。
46.本实施例中,对基于域控制器实现无人驾驶所依赖的传感器(激光雷达、超声波雷达、毫米波雷达、相机等)、芯片、通信等的诊断架构。采用模块化的软件架构使得功能更加清晰、具体,同时便于对故障响应进行统一规划。
47.最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。