1.本发明属于航天测控领域,尤其涉及一种临近空间大气密度探测系统及装置。
背景技术:
2.大气探测对大气科学的发展有重要的促进作用。19世纪初以皮叶克尼斯父子为代表的挪威气象学派先后提出气象学发展史上最为著名的锋面理论、气旋波动理论,数据来源于全球地面观测站网积累的大量地面气象观测资料;上世纪30年代前后开展的高空探测积累了大量的高空气象观测资料,根据这些资料,上世纪30年代后期瑞典籍美国气象学家罗斯贝才有可能提出大气长波理论。因此,大气探测获得的大量系统性气象资料是气象理论发展必不可少的条件之一。
3.天气预报是现代人类生活和社会生产所依赖的重要技术手段之一,使得现代人类可以提前进行判断从事生产、躲避灾害,对生命、财产安全和社会发展产生了巨大的保护和促进作用。天气预报也是从气象观测开始的。20世纪中叶至20世纪末,大气遥感技术的兴起使大气探测技术迅猛发展,并朝着以常规大气探测为基础脉络,以气象卫星探测为重要支撑,以雷达站、海洋浮标站和船舶、髙空探测气球探测方式等在内的全球大气综合探测系统。
4.临近空间(near space)是指距地面20~100公里的空域。临近空间及 100至200km的区域,是航空器和普通航天器无法长期运行的空间。航空器的运行依靠大气动力,其飞行高度在几千米左右,临近空间的稀薄大气不足以支撑航空器的飞行。同时,因稀薄大气的存在产生了一定阻力,普通航天器也无法长期在该范围轨道运行。
5.临近空间环境(包括大气密度、温度等)对气象现象分析、天气预报、弹道导弹打击精度、航天器返回落点预报、空间飞行器的再入及风险评估等具有重要意义,同时,亚轨道航天器等技术的发展也依赖于相应环境数据,临近空间正在成为国防和高技术应用争夺的新领域。
6.目前,国内高空探测主要采用由探空气球携带无线电探空仪升空进行压、温、湿测量。使用探空气球作为载体,一种可携带常规高空探测仪器的可膨胀球状气球,探空气球应有足够尺寸和质量,以保障携带载荷,确保测量元件具有良好升速(升至30km)。气球膨胀后应呈球形或梨形,体积应达到原来4倍以上,最好达5~6倍,且保持这种状态至少1小时。球皮质量优劣直接决定探测高度。探空综合探测使用的基本上都是乳白色探空专用球皮。经生产厂家多年改进,平均施放高度现已提高到28000米左右,最高达35000 米,但对10毫巴高度层探测无保证,探测高度起伏较大,要进一步改进探空气球质量及工艺。
7.使用高纯度氢气作为动力,高空气象探测规范规定,综合探测气球平均升速应保持在400米/分左右,同一型号球皮充入纯度低氢气比充入纯度高的氢气,爆炸高度要低,所以纯度低氢气要多充气量,使球皮体积更大。大多数探空站采用电解水制氢,纯度可达99%以上,安全系数也相对较高。
8.气球总举力由气球内气体体积浮力决定:
9.t=v(pp&)=0.523d3(p-p&)
10.其中,t为总举力,v为气球体积,p指空气密度,p&为气球内气体密度,d是气球直径。利用无线电对探测数据进行下传,地面雷达可以跟踪接收无线电探空仪信号。信号经由接收机接收、解调器解调后,将得到的数据进行记录。
11.因此,现有技术中心存在以下技术问题:通用大气环境探测范围局限于 35km以下,无法探测到35~200km临近空间大气环境;临近空间使用硬质落球探测器进行大气环境探测还没有系统方案,运载方案、弹道分析、站点选址、数据链路、结构透波等多学科系统性问题还处于空白阶段;现在还没有完整的探测球内高集成度低功耗约束下无线电测量单机方案。
技术实现要素:
12.本发明的技术目的是提供一种临近空间大气密度探测系统及装置,以解决临近空间大气密度探测手段缺失、探测过程困难,以及临近空间高可靠、高密度的大气环境数据空白的技术问题。
13.为解决上述问题,本发明的技术方案为:
14.一种临近空间大气密度探测系统,包括数据采集模块、smu测量模块和通信模块。
15.数据采集模块与smu测量模块信号连接,用于采集获取导航数据和载荷数据并输送至smu测量模块。
16.smu测量模块用于接收导航数据和载荷数据并进行存储。
17.通信模块受控于smu测量模块,用于将实现与地面端进行实时数据交互,下传导航数据和载荷数据至地面端。
18.具体地,数据采集模块包括第一加速度计、第二加速度计、温控单元和 gps单元。
19.第一加速度计和第二加速度计用于分别获取载荷数据中的加速度数据。
20.温控单元用于获取获取载荷数据中的温度数据。
21.gps单元用于获取导航数据。
22.具体地,通信模块包括通信处理单元、数据调制单元、功率放大单元和 uhf天线。
23.通信处理单元用于接收导航数据和载荷数据进行组帧得到遥测数据和数传数据。
24.数据调制单元用于接收组帧后的遥测数据和数传数据,并依次进行gfsk 信号调制,和上变频至uhf频段。
25.功率放大模块用于接收uhf频段的遥测数据和数传数据进行功率放大。
26.uhf天线用于接收功率放大后的遥测数据和数传数据下传至地面端。
27.进一步优选地,还包括电池模块和相对应的电池测量单元,电池模块用于为数据采集模块、smu测量模块和通信模块提供电力支持。
28.电池测量单元用于采集电池模块得到电压采集数据。
29.一种临近空间大气密度探测装置,搭载如上述的临近空间大气密度探测系统,包括壳体、固定组件、天线组件和综电组件。
30.固定组件、天线组件和综电组件设置于壳体内,壳体为球型结构用于保护内部组件。
31.固定组件用于闭合壳体,以及安装天线组件和综电组件。天线组件用于与外部进
行无线通讯。综电组件用于测量并处理得到导航数据和载荷数据,并通过天线组件进行实时数据交互。
32.具体地,壳体包括球柱段、第一球头和第二球头。
33.第一球头和第二球头为透波、耐高温天线罩,第一球头和第二球头分别经固定组件固定于球柱段两端,第一球头、球柱段和第二球头依次连接形成球型壳体。
34.其中,固定组件包括第一外螺纹法兰框、第二外螺纹法兰框、第一内螺纹螺纹圈和第二内螺纹螺纹圈。
35.第一外螺纹法兰框和第二外螺纹法兰框分别固定于球柱段的两端面上,第一内螺纹螺纹圈固定于第一球头的端面上,第一内螺纹螺纹圈配合第一外螺纹法兰框使第一球头与球柱段螺纹连接,第二内螺纹螺纹圈固定于第二球头的端面上,第二内螺纹螺纹圈配合第二外螺纹法兰框使第二球头与球柱段螺纹连接。
36.具体地,天线组件包括第一uhf贴片天线、第二uhf贴片天线、gps贴片天线。
37.第一uhf贴片天线和第二uhf贴片天线分别安装于第一外螺纹法兰框和第二外螺纹法兰框上并且对称设置,用于与地面端实现实时数据传输。
38.gps贴片天线安装于第一外螺纹法兰框或第二外螺纹法兰框上,用于获取导航数据。
39.其中,综电组件安装于球柱段内,并分别与第一外螺纹法兰框和第二外螺纹法兰框固定连接。
40.综电组件内设有smu测量模块、第一加速度计、第二加速度计和电池模块。
41.第一加速度计设置于临近空间大气密度探测装置的质心位置,第二加速度计设置于第一加速器下方。
42.smu测量模块用于接收第一加速度计和第二加速度计的载荷数据和导航数据以进行存储,将存储的各项数据经第一uhf贴片天线或第二uhf贴片天线传输至地面。
43.电池模块用于为临近空间大气密度探测装置提供电力支持。
44.进一步优选地,还包括温度测量组件,用于采集温度数据并输送至smu 测量模块,以进行温度监控。
45.温度测量组件,包括两个铂电阻温度传感器和两个ad590温度传感器。
46.铂电阻温度传感器表贴于壳体上,用于获取壳体的温度。
47.ad590温度传感器分别表贴于smu测量模块和电池模块上,用于获取smu 测量模块和电池模块的温度。
48.本发明由于采用以上技术方案,使其与现有技术相比具有以下的优点和积极效果:
49.本发明利用牛顿第二定律,设计得到一种临近空间大气密度探测装置,搭载于运载火箭一级或二级,分离过程受控,可以探测到35~200km或以上空间。
50.本发明设计和研制的smu测量模块最大功耗小于5w,配备16v\5ah蓄电池待机时长可达16h左右,满足发射前提前加电装入火箭的待机时长要求;测量单机包络170*150*150mm,置于直径300mm的探测球结构内,充分做到小型化、高集成。
51.本发明探测准确度高,大气温度:在30~120km内,误差小于10%;大气密度:在30~120km内,误差小于10%;大气压力:在30~120km内,误差小于10%;风速:在30~100km
内,测量误差小于3m/s。
附图说明
52.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。
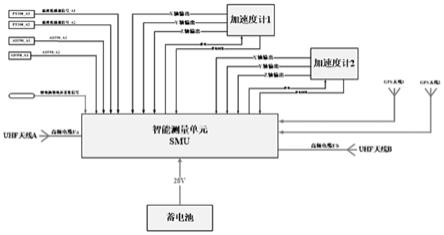
53.图1为本发明实施例提供的一种临近空间大气密度探测系统的结构框图;
54.图2为本发明实施例提供的一种通信模块的结构框图;
55.图3为本发明实施例提供的一种临近空间大气密度探测装置的结构示意图;
56.图4为本发明实施例提供的一种临近空间大气密度探测装置的爆炸拆分图;
57.图5为本发明实施例提供的一种临近空间大气密度探测装置的剖面图示意图;
58.图6为本发明实施例提供的一种临近空间大气密度探测装置分离安装示意图;
59.图7为本发明实施例提供的一种临近空间大气密度探测装置于火箭安装示意图;
60.图8为本发明实施例提供探测装置的弹道特性(时间-高度)示意图;
61.图9为本发明实施例提供探测装置的弹道特性(高度-速度)示意图;
62.图10为本发明实施例提供探测装置的弹道特性(高度-动压)示意图;
63.图11为本发明实施例提供探测装置的弹道特性(高度-过载)示意图;
64.图12为本发明实施例提供接收站与探测装置的天线跟踪方位角变化示意图;
65.图13为本发明实施例提供接收站与探测装置的天线跟踪俯仰角变化示意图;
66.图14为本发明实施例提供接收站与探测装置之间直线距离变化示意图;
67.图15为本发明实施例提供探测装置的飞行阶段示意图。
68.附图标记说明
69.11:第一球头;12:球柱段;13:第二球头;21:第一外螺纹法兰框; 22:第二外螺纹法兰框;31:第一内螺纹螺纹圈;32:第二内螺纹螺纹圈; 41:第一uhf贴片天线;42:第二uhf贴片天线;5:gps贴片天线;6:综电组件。
具体实施方式
70.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
71.为使图面简洁,各图中只示意性地表示出了与本发明相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
72.以下结合附图和具体实施例对本发明提出的一种临近空间大气密度探测系统及装置作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。
73.实施例1
74.首先,参看图1和图2,本实施例提供一种临近空间大气密度探测系统,可对临近空
间大气进行高精度测量,从电路设计角度上来讲,本实施例包括数据采集模块、smu测量模块和通信模块。
75.参看图1,数据采集模块与smu测量模块信号连接,数据采集模块为由多个传感器构成,具体地,数据采集模块包括第一加速度计、第二加速度计、温控单元和gps单元。第一加速度计与第二加速度计相类似,能够分别输出 x轴加速度、y轴加速度、z轴加速度至smu测量模块。温控单元则包括ad590 温度传感器和铂电阻温度传感器,对整个系统外部硬件进行温度数据采集,根据温度数据加以监控。gps单元可以理解为两付gps贴片天线5,将外部的定位信息、时间等导航数据输送至smu测量模块。
76.具体地,该smu测量模块为本实施例的核心构成且分别与数据采集模块和通信模块信号连接。smu测量模块采用高功能密度的工业级soc为核心,利用其丰富的片内功能和接口资源,拓展连加速度计等传感器或天线,从而实现低成本和高集成度技术效果。具体地,smu测量模块能以100hz频率采集加速度计数据加以存储,并将数据通过通信模块实现实时下传,做到大气数据分辨率20m。本实施例中,搭载本smu测量模块的测量单机整体功耗不超过5w,配备16v\5ah蓄电池待机时长可达16小时左右,且该测量单机体积小,充分做到了小型化和高集成的效果。其各项测量数据精度高,大气温度:在30~120km内,优于10%;大气密度:在30~120km内,优于10%;大气压力:在30~120km内,优于10%;风速:在30~100km内,测量误差优于3m/s。较优地,smu测量模块内部包括主、备机,通过can总线实现互联共享,保证测量数据可靠下传。
77.参看图2,通信模块受控于smu测量模块,用于将实现与地面端进行实时数据交互,下传导航数据和载荷数据至地面端,以推算出临近空间大气密度等一系列参数。本实施工作在uhf频段,下行采用高斯频移键控(gfsk) 的调制方式。它是一种将数据经过高斯低通滤波器进行预调制后,在进行fsk 调制的数字调制方式。它在保持恒定幅度的同时,能够通过改变高斯低通滤波器的3db带宽对已调信号的频谱进行控制,具有抗多普勒频偏、恒幅包络、功率谱集中,频谱较窄等优点。
78.具体地,通信模块包括2个通信子模块,2个通讯子模块能够工作在不同频点,相互之间互不干扰。每个通信子模块均包括通信处理单元、数据调制单元、功率放大单元和uhf天线。通信处理单元用于接收导航数据和载荷数据进行组帧得到遥测数据和数传数据,然后通过spi接口传输至数据调制单元。数据调制单元会接收组帧后的遥测数据和数传数据,在其内部完成 gfsk的信号调制,然后将调制后的信号上变频至uhf频段后输入功率放大模块。功率放大模块用于接收uhf频段的遥测数据和数传数据进行功率放大,然后经过射频开关和高频电缆后,通过uhf天线将功率放大后的遥测数据和数传数据下传至地面端。相对应的,地面端探测器的可采用便携式圆极化天线,接收增益可达12dbi,g/t值为-14.5db/k。探测器在进行天地通信链路计算,按照500公里、地面站天线仰角按照5
°
进行计算,该通信模块下行链路的参数如下,卫星发射功率:500mw,发射天线增益:-3dbi,通信距离: 500km,地面站跟踪仰角:大于5
°
,调制方式:gfsk调制,下行码速率: smu-a:4800bps;smu-b:4800bps,地面端天线g/t值:优于-14.5db/k。通过链路余量统计可以得出,在通信的传送速率为4800bps的情况下,通信余量分别为15.6db和6.56db,满足箭地通信任务要求。
79.较优地,本实施例还包括电池模块和相对应的电池测量单元。具体地,电池模块用于为各传感器、smu测量模块和通信模块提供电力支持。电池测量单元属于smu测量模块,可
以对电池模块进行采集得到电压采集数据,以起到实时监控的作用。
80.实施例2
81.参看图3至图6,本实施例提供一种临近空间大气密度探测装置,搭载实施例1的临近空间大气密度探测系统,本实施例主要从结构方面进行说明。
82.一种临近空间大气密度探测装置包括壳体、固定组件、天线组件和综电组件6。
83.从外向内看,壳体为球型结构,固定组件、天线组件和综电组件6设置于壳体内,壳体起到保护其他组件的作用。
84.具体地,壳体可分为三段式结构,其包括球柱段12、第一球头11和第二球头13。第一球头11和第二球头13为透波、耐高温天线罩,实现透波和热防护的作用。第一球头11和第二球头13分别经固定组件固定于球柱段12 两端,第一球头11、球柱段12和第二球头13依次连接形成球型壳体。壳体采用铝合金构成,金属层厚度为8mm。金属球体结构内嵌星表插头,用于地面测试、充电和射前状态设置,完成射前设置后,可闭合保护金属盖。
85.固定组件用于闭合上述分段式壳体,以及安装天线组件和综电组件6。
86.参看图3和图4,具体地,固定组件包括第一外螺纹法兰框21、第二外螺纹法兰框22、第一内螺纹螺纹圈31和第二内螺纹螺纹圈31。第一外螺纹法兰框21和第二外螺纹法兰框22分别固定于球柱段12的两端面上,第一内螺纹螺纹圈31固定于第一球头11的端面上,第一内螺纹螺纹圈31配合第一外螺纹法兰框21使第一球头11与球柱段12螺纹连接,第二内螺纹螺纹圈 31固定于第二球头13的端面上,第二内螺纹螺纹圈31配合第二外螺纹法兰框22使第二球头13与球柱段12螺纹连接。
87.参看图4,天线组件用于与外部进行无线通讯,具体地,天线组件包括第一uhf贴片天线41、第二uhf贴片天线42、gps贴片天线5。
88.第一uhf贴片天线41和第二uhf贴片天线42分别安装于第一外螺纹法兰框21和第二外螺纹法兰框22上并且对称布局,实现近全向波束覆盖,2 付uhf贴片天线在壳体内部呈180
°
对称布置,可实现近全向覆盖,保证姿态不确定状态下可靠通信。gps贴片天线5安装于第一外螺纹法兰框21或第二外螺纹法兰框22上,用于获取导航数据。
89.综电组件6安装于球柱段12内,并分别与第一外螺纹法兰框21和第二外螺纹法兰框22固定连接。综电组件6内设有搭载实施例1中的smu测量模块的单机、第一加速度计、第二加速度计和提供电力的电池模块。综电组件 6内部各部件应当合理布局,质心偏差不大于1mm,第一加速度计设置于本实施的质心位置,第二加速度计设置于第一加速器下方,两个加速度计的z轴方向上共向。
90.smu测量模块会接收第一加速度计和第二加速度计的载荷数据和导航数据以进行存储,将存储的各项数据经第一uhf贴片天线41或第二uhf贴片天线42传输至地面。
91.电池模块用于为临近空间大气密度探测装置提供电力支持,其具体为一台16v\5ah蓄电池以及从蓄电池出发连接至各部件的供电线路。
92.较优地,还包括温度测量组件,用于采集温度数据并输送至smu测量模块,以进行温度监控。温度测量组件,包括两个铂电阻温度传感器和两个 ad590温度传感器。
93.铂电阻温度传感器表贴于壳体上,用于获取壳体的温度,获取的温度参数输送至smu测量模块。ad590温度传感器分别表贴于smu测量模块和电池模块上,用于获取smu测量模块和电池模块的温度,进而送至smu测量模块。
94.相对应地,为了保护本实施例,除了温度测量组件还需要设置隔热材料。参看图5,本实施例中,壳体表面使用热控涂层进行隔热处理,热涂层厚度为5mm,壳体内部则采用隔热材料作为隔热层,隔热层厚度为5mm。隔热材料主要采用玻璃布酚醛层压板复合材料,材料厚度为15~34.5mm。目前球柱段 12和球头内壁与安装的综电组件6和天线组件之间,均存在一定的间隙,可以根据实际情况填埋聚氨酯类的轻质低热导率的隔热材料,进一步保证球内温度。
95.参看图6和图7,现对本实施例搭载设计进行说明,图6为本实施与分离器盒型连接示意图,通过盒型分配器进行安装和分离,分离过程可控,探测器在一二分离后侧向分离,分离速度约1m/s。运载火箭一子级箱间段、二子级箱间段具备探测器搭载安装分离条件,分离后真空段姿态翻滚角速度不超过5
°
/s,被动段最大高度不低于120km,搭载对主任务入轨运载能力影响较小。因此,运载火箭能够以较小改动满足硬质落球探测器尺寸、质量和搭载探测高度等技术指标要求。图7为本实施例与分离机构在一级子级火箭上的安装布局图。
96.参看图8至图11,基于本实施例为目标,进行弹道仿真,本实施的主要弹道特性如附图所示。针对仿真的结果,可延伸计算站址的选择。参看图12 至图14。遥测接收采用静止宽波束接收天线,接收波束覆盖探测器被动飞行段空域,不需要主动跟踪,降低了系统复杂度。对站址要求为,附近电磁环境好,在460mhz~480mhz频段无强干扰;地势高,无遮挡;满足供电需要。仿真分析站址是否可行,其中假设一站址的仿真结果如图12至图14所示,可知,该站址的通信距离最远为450km,最近为35km。天线跟踪方位角变化范围为14
°
~45
°
,需转动31
°
;俯仰角变化范围为0
°
~32
°
。主要负责探测器飞行170s~520s的遥测信号接收任务,520s之后对探测器的跟踪仰角低于5
°
,受地形影响信号将被遮挡。经分析,该站址能够作为地面遥测接收站选址。
97.参看图15,为本实施例具体实施过程进行说明,本实施例在实施过程中可概括为4个运行阶段,即发射准备段、主动飞行段、被动飞行段和落区地面段。
98.发射准备段,运载火箭发射-2h本实施例完成充电、射前状态设置,完成加电。系统计时器开始计时,以1hz频率采集平台状态信息并通过can 总线发送。
99.主动飞行段,smu、加速度计继续保持加电状态,平台以1hz频率采集平台状态信息和加速度计信息,同时smu内置大容量存储器开始存储平台遥测数据和加速度计信息。
100.被动飞行段,本实施例继续保持加电状态,以100hz频率采集平台状态信息、加速度计信息和gps信息;smu内置大容量存储器继续存储相关信息。实施例与运载火箭分离后smu开启信号发送,主备机smu-a、smu-b 以2hz交替发送主动飞行段及被动飞行段组包后的下行数据包。
101.落区地面段,本实施例落地后,继续保持加电状态,uhf应答机开启低频次射频发。
102.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式。即使对本发明作出各种变化,倘若这些变化属于本发明权利要求及其等同技术的范围之内,则仍落入在本发明的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
