1.本发明隶属一种机械手臂的学习技术领域,特别是指一种图形化机械手臂学习系统及其学习方法。
背景技术:
2.按,在全球化的趋势下,工业技术及资讯科技的高度进展,已为人类生活及工作型态带来许多的可能性,以加工制造业而言,传统以人工搬运方式或单纯上下料的传送夹具,已不符合快速及准确的传送需求,而六轴机械手臂的开发满足了此一要求,其夹爪的移动路线及夹取方式可以让操作人员以程式编译方式来自行规划与设计,使其具有更多样的移动路线及夹取方式,以满足不同的使用需求,对中小企业而言是一最佳的选择,也符合工业4.0的发展趋势与需求。
3.而该六轴机械手臂在规划其搬运物品由a点至b点的移动路线及夹取方式时,如图1所示,该六轴机械手臂(10)通常可选择性连接一具程式编译功能的学习器(20)来进行规划,该学习器(20)具有一选择单元(21)及一显示画面(25),其中该选择单元(21)可以是复数选择按钮、摇杆或轨迹球等,而该显示画面(25)可显示一编译程式(26)的画面,让操作人员可以利用已搭建好的仿真工作站和六轴机械手臂(10)系统,在建立好例行程序后,通过程式编译编写该六轴机械手臂(10)的程序,而完成该六轴机械手臂(10)从a到b点的移动路线及夹取方式的规划与设计;
4.但,现有利用学习器(20)的编译程式(26)来进行编撰,若为一般动作简易的程式其设计编撰约需要1~2工作天,而如遇到需进行复杂动作、且准确度高的程式则约需要3~5工作天,并需具备专业使用技术,然操作人员进行程式撰写设计至少需要2~3周训练时间,则此,对于多样少量生产为主的中小企业无法满足其快速换线及竞争力的需求,同时整体规划及建制成本极高,相对于传统产业引进ai自动化进入门槛产生困难;且当人才异动时,中小企业可能会面临重新训练的成本花费,但若委外处理,则又会存在编译时间不稳定,而导致降低生产效能,为此,如何解决上述现有技术的问题与缺失,即为相关业者所亟欲研发的课题所在。
5.于是,本发明人秉持多年该相关行业的丰富设计开发及实际制作经验,针对现有的结构及缺失予以研究改良,经不断努力的研究与试作,终于成功的开发出一种图形化机械手臂学习系统及其学习方法,借以克服现有需以程式撰写方式来进行所衍生的困扰与不便。
技术实现要素:
6.本发明的主要目的,是在提供一种图形化机械手臂学习系统及其学习方法,借以能利用图形化介面进行移动路线及夹取方式的规划与设计,而简单快速完成。
7.本发明的次一主要目的,是在提供一种图形化机械手臂学习系统及其学习方法,其不需具专业素养的人员也可轻易撰写/编译机械手臂,使其能更人性化的操作。
8.本发明的另一主要目的,是在提供一种图形化机械手臂学习系统及其学习方法,其能让机械手臂其控制脚本的操作与编辑能简单快速,进而提高设备稼动率,以满足中小企业少量多样化的需求。
9.基于此,本发明主要是通过下列的技术手段,来实现前述的目的及其功效,其包含有:
10.一手臂设备,其具有一控制单元,该控制单元连接有一移动模组及一i/o模组,其中,该移动模组可用于控制该手臂设备于各轴向的移动与旋转,而该i/o模组用于检知该手臂设备的各轴向位置与夹爪启闭,再者,该控制单元连接有一用于储存、转译及执行该手臂设备原生指令的指令处理单元,另该指令处理单元连接有一通讯介面;
11.一伺服设备,其至少包含有一处理单元、一储存单元及一通讯介面,其中该处理单元可用于运算、执行各项指令及数据资料,且与该处理单元连接的储存单元内至少储存有一图形化流程编辑介面模组,用以将编译该手臂设备动作脚本的编辑指令与动作指令的程式码设定成一相对应的图标,再者与该处理单元连接的通讯介面,是供该伺服设备与外部连结,且该处理单元进一步可以连接有一显示单元,以供显示该图形化流程编辑介面模组的画面;
12.一人机介面设备,其具有一供与外部连结的通讯介面,又该人机介面设备内具有一连接该通讯介面的指令处理单元。
13.为使贵审查委员能进一步了解本发明的构成、特征及其他目的,以下乃举本发明的若干较佳实施例,并配合附图详细说明如后,同时让熟悉该项技术领域者能够具体实施。
附图说明
14.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
15.图1:是现有机械手臂学习系统的架构示意图。
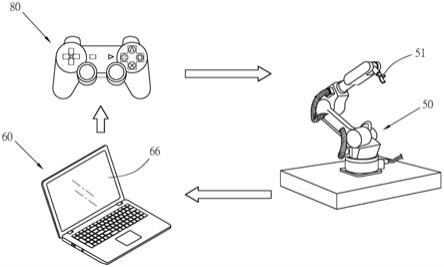
16.图2:是本发明图形化机械手臂学习系统的系统外观示意图。
17.图3:是本发明图形化机械手臂学习系统的系统架构示意图,供说明其各元件的态样及其相对关系。
18.图4:是本发明图形化机械手臂学习系统的图控区示意图。
19.图5:是本发明图形化机械手臂学习方法的流程架构示意图。
20.其中,10:六轴机械手臂;20:学习器;21:选择单元;25:显示画面;26:编译程式;50:手臂设备;51:夹爪;52:控制单元;53:移动模组;54:i/o模组;55:指令处理单元;56:通讯介面;60:伺服设备;61:处理单元;62:储存单元;63:图形化流程编辑介面模组;64:通用设备指令丛集单元;65:通讯介面;66:显示单元;80:人机介面设备;81:通讯介面;82:指令处理单元。
具体实施方式
21.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例
中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.本发明是一种图形化机械手臂学习系统及其学习方法,随附图例示的本发明的具体实施例及其构件中,所有关于前与后、左与右、顶部与底部、上部与下部、以及水平与垂直的参考,仅用于方便进行描述,并非限制本发明,亦非将其构件限制于任何位置或空间方向。图式与说明书中所指定的尺寸,当可在不离开本发明的申请专利范围内,根据本发明的设计与需求而进行变化。
23.本发明的图形化机械手臂学习系统及其学习方法的构成,是如图2、3所示,其包含有一手臂设备(50)、一伺服设备(60)及至少一人机介面设备(80),于本实施例中,该人机介面设备(80)可以是一摇杆;
24.而所述的手臂设备(50)可以是具有一夹爪(51)的六轴机械手臂,且该手臂设备(50)具有一控制单元(52),该控制单元(52)连接有一移动模组(53)及一i/o模组(54),其中,该移动模组(53)可用于控制该手臂设备(50)于各轴向的移动与旋转,而该i/o模组(54)用于检知该手臂设备(50)的各轴向位置与夹爪的启闭,再者,该手臂设备(50)的控制单元(52)连接有一指令处理单元(55),且该指令处理单元(55)可用于储存及执行该手臂设备(50)的原生指令,另该手臂设备(50)具有一连接该指令处理单元(55)的通讯介面(56),供该手臂设备(50)与外部连结,以接收及发送相关指令与数据资料,其中该通讯介面(56)可以包含但不限定是usb、rj45、comport等连接埠;
25.又所述的伺服设备(60)至少包含有一处理单元(61)、一储存单元(62)及一通讯介面(65),其中该处理单元(61)可用于运算、执行各项指令及数据资料,而连接该处理单元(61)的储存单元(62)内至少储存有一图形化流程编辑介面模组(63),如图4所示,用以将编译该手臂设备(50)动作脚本的编辑指令〔包含但不限定启动编辑脚本、停止编辑脚本、储存脚本、删除脚本、复制脚本等〕与动作指令〔包含但不限定世界座标移动、六轴角度移动、开爪、闭爪、i/o控制、速度修改等〕的程式码设定成一相对应的图标〔icon〕,俾供操作人员可以通过选择图标即可令该处理单元(61)完成相对应的程式码编译,再者,该处理单元(61)连接有一通用设备指令丛集单元(64),以供储存及记录各通用设备的指令,又连接该处理单元(61)的通用设备指令丛集单元(64)进一步连接该通讯介面(65),以供该伺服设备(60)与外部的手臂设备(50)或人机介面设备(80)等连结,以接收及发送相关指令与数据资料,其中该通讯介面(65)可以包含但不限定是usb、rj45、comport等连接埠,且该处理单元(61)进一步可以连接有一显示单元(66),该显示单元(66)可以是与伺服设备(60)为外部连接或与该伺服设备(60)结合成一体;
26.再者,所述的人机介面设备(80)可以是摇杆、键盘或滑鼠,且该人机介面设备(80)可以是外部与该伺服设备(60)连接的独立设备或与该伺服设备(60)结合的一体设备,且该外部连接的人机介面设备(80)具有一供该伺服设备(60)连结的通讯介面(81),以接收及发送相关指令与数据资料,其中该通讯介面(81)可以包含但不限定是usb、rj45、comport等连接埠,又该人机介面设备(80)内具有一连接该通讯介面(81)的指令处理单元(82),且该指令处理单元(82)可用于储存及执行该人机介面设备(80)的原生指令,使该人机介面设备(80)可用于对该伺服设备(60)显示于该显示单元(66)的图形化流程编辑介面模组(63)画
面的选项或功能等图标〔icon〕进行游标移动、选取、确认等动作;
27.借此,让操作人员可以通过该伺服设备(60)将储存单元(62)内的图形化流程编辑介面模组(63)显示于该人机介面设备(80)的显示器上,并通过选择其图标完成该手臂设备(50)的动作脚本编译,而组构成一易于动作规划及设计的图形化机械手臂学习系统者。
28.至于本发明图形化机械手臂学习系统的学习方法,则是如图2、5所示,(a)启动流程脚本、(b)读取流程所需手臂设备及参数、(c)确认手臂设备是否存在及参数是否正常、(d)生成手臂设备专用指令、(e)通过通讯介面传递指令、(f)手臂设备转译为原生指令、(g)手臂设备执行原生指令、(h)确认是否正确执行、(i)停止脚本产生错误报告及(j)执行完整脚本等步骤。其中:
29.(a)启动流程脚本:使用者设定完成相关参数后,将该图形化流程编辑介面模组(63)的画面显示于连接该伺服设备(60)的显示单元(66),可以使用如摇杆的人机介面设备(80)于该图形化流程编辑介面模组(63)的画面中选取启动脚本的图标〔icon〕,之后执行(b)步骤;
30.(b)读取流程所需手臂设备及参数:当执行到此一图标〔icon〕,系统会先读取流程中所需的手臂设备(50)及其相对参数,之后执行(c)步骤;
31.(c)确认手臂设备是否存在及参数是否正常:系统会确认选择的手臂设备(50)处于可控制状态,以判断该手臂设备(50)连线是否异常与要求目前座标可确认该手臂设备(50)状态,且控制相对应的参数亦同时执行确认,如以上两个状态中有其中一个出现异常,系统会执行(i)的步骤。如该手臂设备(50)通讯与参数都正确后,则系统会执行(d);
32.(d)生成手臂设备专用指令:确认该手臂设备(50)通讯与参数都正确后,利用该伺服设备(60)的图形化流程编辑介面模组(63)及人机介面设备(80)的选取而生成对应该手臂设备(50)的专用指令,如选取代表世界座标移动、代表六轴角度移动、代表i/o控制或代表速度修改等,之后执行(e)步骤;
33.(e)通过通讯介面传递指令:该伺服设备(60)在生成该手臂设备(50)的专用指令后,通过两者的通讯介面(65、56)传送至对应该手臂设备(50),之后执行(f)步骤;
34.(f)手臂设备转译为原生指令:而当该手臂设备(50)通过通讯介面(56)接收到指令后,则转译为该手臂设备(50)的原生专用的指令,之后执行(g)步骤;
35.(g)手臂设备执行原生指令:而该手臂设备(50)在转换完成原生专用指令后,则进行各手臂设备(50)动作脚本的原生专用指令的执行,之后执行(h)步骤;
36.(h)确认是否正确执行:该手臂设备(50)在动作脚本执行中,进一步判断确认是否正确执行,如判断为正确,则回传正确指令进行(j)步骤,如执行异常,则系统会执行(i)步骤;
37.(i)停止脚本产生错误报告:在经过(c)、(h)步骤判断为异常时,即停止该手臂设备(50)的动作脚本,并产生错误报告,且重新回到(a)步骤执行;以及
38.(j)执行完整脚本,在经过(h)步骤判断为正确时,则持续执行脚本至最后动作。
39.实施例1、当设定一组路径,如将a点物品夹取放置于b点。
40.设定a点位置(xa,ya,za),b点位置(xb,yb,zb),将路径设定好后,执行脚本。
41.首先,会确保该手臂设备(50)的夹爪(51)是呈打开的状态,并由该手臂设备(50)
的i/o模组(54)确保i/o可以控制且设定的i/o脚位存在,如有异常系统自动中断操作发出错误报告,若一切正常则利用该伺服设备(60)的图形化流程编辑介面模组(63)画面,通过该人机介面设备(80)选取对应的图标〔icon〕而生成该手臂设备(50)的i/o的专用指令,内容包含i/o的脚位与开启指令,通过通讯传送至手臂设备(50)脚本后,脚本判断此指令为i/o开启指令,将指令转换成手臂设备(50)的原生指令后开启指定i/o。之后进行确认执行正常,若系统回报执行失败系统自动中断操作发出错误报告,若一切正常则切换至下一步指令,进行移动至a点。
42.接着,当确认该手臂设备(50)可以控制且设定的座标正常,如有异常系统,则自动中断操作发出错误报告,若一切正常则生成该手臂设备(50)移动的专用指令,内容包含移动方式与目标座标,通过通讯传送至手臂设备(50)脚本后,脚本判断此指令为移动指令,将指令转换成手臂设备(50)原生指令后移动手臂设备(50)。之后进行确认执行正常,若系统回报执行失败,系统会自动中断操作发出错误报告,若一切正常则切换至下一步指令,进行夹取物件。
43.接着,确认该手臂设备(50)i/o可以控制且设定的i/o脚位存在,如有异常系统自动中断操作发出错误报告,若一切正常生成手臂设备(50)i/o的专用指令,内容包含i/o脚位与关闭指令,通过通讯传送至手臂设备(50)脚本后,脚本判断此指令为i/o关闭指令,将指令转换成手臂设备(50)原生指令后关闭指定i/o。之后进行确认执行正常,若系统回报执行失败系统自动中断操作发出错误报告,若一切正常则切换至下一步指令,进行移动至b点。
44.紧接着,确认该手臂设备(50)可以控制且设定的座标正常,如有异常系统自动中断操作发出错误报告,若一切正常生成手臂设备(50)移动的专用指令,内容包含移动方式与目标座标,通过通讯传送至手臂设备(50)脚本后,脚本判断此指令为移动指令,将指令转换成手臂设备(50)原生指令后移动该手臂设备(50)。之后进行确认执行正常,若系统回报执行失败系统自动中断操作发出错误报告,若一切正常则切换至下一步指令,进行该手臂设备(50)的夹爪(51)放开物件。
45.最后,确认手臂设备(50)i/o可以控制且设定的i/o脚位存在,如有异常系统自动中断操作发出错误报告,若一切正常生成手臂设备(50)i/o的专用指令,内容包含i/o脚位与开启指令,通过通讯传送至手臂设备(50)脚本后,脚本判断此指令为i/o开启指令,将指令转换成手臂设备(50)原生指令后开启指定i/o。之后进行确认执行正常,若系统回报执行失败系统自动中断操作发出错误报告,若一切正常系统发现无下一步指令,故结束此脚本。
46.实施例2、当设定一组路径,如于a点夹取物品并于b点做角度翻转。
47.设定a点位置(xa,ya,za),b点位置(xb,yb,zb),并于b点修改姿态为(θc,θc,θc),将路径设定好后,执行脚本。
48.首先,会确保手臂设备(50)的夹爪(51)是打开的状态,确认手臂设备(50)的i/o可以控制、且设定的i/o脚位存在,如有异常系统自动中断操作发出错误报告,若一切正常利用该伺服设备(60)的图形化流程编辑介面模组(63)生成手臂设备(50)的i/o的专用指令,内容包含i/o脚位与开启指令,通过通讯传送至手臂设备(50)脚本后,脚本判断此指令为i/o开启指令,将指令转换成手臂设备(50)原生指令后开启指定i/o。之后进行确认执行正常,若系统回报执行失败系统自动中断操作发出错误报告,若一切正常则切换至下一步指令,
进行移动至a点。
49.其次,确认手臂设备(50)可以控制且设定得座标正常,如有异常系统自动中断操作发出错误报告,若一切正常则利用伺服设备(60)的图形化流程编辑介面模组(63)生成手臂设备(50)移动的专用指令,内容包含移动方式与目标座标,通过通讯传送至手臂设备(50)脚本后,脚本判断此指令为移动指令,将指令转换成手臂设备(50)原生指令后移动该手臂设备(50)。之后进行确认执行正常,若系统回报执行失败系统自动中断操作发出错误报告,若一切正常则切换至下一步指令,进行手臂设备(50)的夹爪(51)夹取物件。
50.接着,确认手臂设备(50)i/o可以控制且设定的i/o脚位存在,如有异常系统自动中断操作发出错误报告,若一切正常则利用伺服设备(60)的图形化流程编辑介面模组(63)生成手臂设备(50)i/o的专用指令,内容包含i/o脚位与关闭指令,通过通讯传送至手臂设备(50)脚本后,脚本判断此指令为i/o关闭指令,将指令转换成手臂设备(50)原生指令后关闭指定i/o。之后进行确认执行正常,若系统回报执行失败系统自动中断操作发出错误报告,若一切正常则切换至下一步指令,进行移动至b点。
51.之后,确认手臂设备(50)可以控制且设定的座标正常,如有异常系统自动中断操作发出错误报告,若一切正常则利用伺服设备(60)的图形化流程编辑介面模组(63)生成手臂设备(50)移动的专用指令,内容包含移动方式与目标座标,通过通讯传送至手臂设备(50)脚本后,脚本判断此指令为移动指令,将指令转换成手臂设备(50)原生指令后移动该手臂设备(50)。之后进行确认执行正常,若系统回报执行失败系统自动中断操作发出错误报告,若一切正常则切换至下一步指令,进行翻转物件。
52.最后,确认该手臂设备(50)可以控制且设定的姿态正常,如有异常系统自动中断操作发出错误报告,若一切正常则利用伺服设备(60)的图形化流程编辑介面模组(63)生成手臂设备(50)移动的专用指令,内容包含移动方式与目标座标,通过通讯传送至手臂脚本后,脚本判断此指令为旋转指令,将指令转换成手臂设备(50)原生指令后修改该手臂设备(50)姿态。之后进行确认执行正常,若系统回报执行失败系统自动中断操作发出错误报告,若一切正常系统发现无下一步指令,故结束此脚本。
53.通过前述的设计与说明,本发明的图形化机械手臂学习系统及其学习方法是利用该伺服设备(60)的图形化流程编辑介面模组(63)的图标〔icon〕来生成该手臂设备(50)的专用指令,并经转译成该手臂设备(50)的原生指令,其操作方式是以如摇杆的人机介面设备(80),且通过简易图形化介面,能人性化简单快速的操作,且不需专业技术,降低人力成本及学习设定时间,同时让辅助该手臂设备(50)的控制脚本的操作与编辑能简单快速,进而能满足中小企业少量多样化的需求,以提高设备稼动及产线生产率。
54.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
