1.本发明属于农用机械设备技术领域,具体涉及一种全自动菠萝采摘机
背景技术:
2.果蔬采摘作业是果蔬生产中最耗时、最费力的一个环节。果蔬收获期间需投入的劳力约占整个种植过程的50%-70%。随着社会经济的发展和人口的老龄化,很多国家农业劳动力严重短缺。导致果蔬生产劳动力成本增加。为降低成本,提高劳动效率,果实采摘的自动化成为亟待解决的问题。
3.针对菠萝来说,由于菠萝树和果实的特殊结构,目前国内绝大多数的菠萝采摘都采用手工方式进行。这种手工作业方式不仅效率低,而且对手的伤害程度较大。
技术实现要素:
4.本发明的目的是提供一种全自动菠萝采摘机,解决现有手工采摘菠萝存在效率低,且对手伤害较大的问题。
5.为了达到上述目的,本发明所采用的技术方案是:一种全自动菠萝采摘机,包括箱体,所述箱体的底侧设置有滑轨,所述滑轨上滑动装配有收集箱,所述箱体的外侧设置有输送带和壳体,所述壳体位于所述输送带的外部,所述输送带上设置有多个隔板;滑轨的下侧设置有移动机构和升降机构,所述升降机构的驱动端设置有切割机构。
6.作为本发明的一种优选的技术方案,所述移动机构为履带输送机构,所述履带输送机构通过多个支腿设置在所述滑轨的下侧。
7.作为本发明的一种优选的技术方案,所述履带输送机构的数量为二,每个履带输送机构均通过两个支腿设置在所述滑轨的下侧。
8.作为本发明的一种优选的技术方案,所述箱体的上侧通过销钉可转动地设置有限位板。
9.作为本发明的一种优选的技术方案,所述限位板的数量为二。
10.作为本发明的一种优选的技术方案,所述升降机构包含四个电动伸缩杆。
11.作为本发明的一种优选的技术方案,所述切割机构包含环形外壳,所述环形外壳与四个所述电动伸缩杆的驱动端相铰接,环形外壳上设置有电机,所述电机的驱动端设置有斜齿轮,所述斜齿轮啮合有内齿圈,所述内齿圈的底部设置有导轨,所述导轨上均布有多个弧形槽,每个所述弧形槽中均设置有导销,所述导销上连接有扇形刀具。
12.作为本发明的一种优选的技术方案,所述电机的数量为二
13.本发明的有益效果是:本发明的一种全自动菠萝采摘机,在使用的过程中,发动电机可自动完成对菠萝进行切割、运送一系列过程,大大地提高了采摘效率,降低了人力,避免了采摘时对手的伤害,从而有效地解决了菠萝采摘难的问题,促进了菠萝产业的发展。
附图说明
14.此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
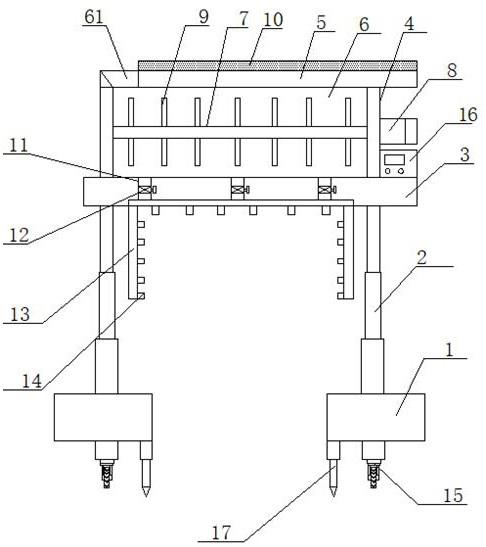
15.图1为本发明的一种全自动菠萝采摘机的结构示意图;
16.图2为本发明的一种全自动菠萝采摘机的侧视图;
17.图3为本发明的一种全自动菠萝采摘机中切割机构的俯视图;
18.图4为本发明的一种全自动菠萝采摘机中切割机构的局部结构示意图。
19.图中:1.箱体,2.输送带,3.支腿,4.内齿圈,5.履带输送机构,6.环形外壳,7.电机,8.电动伸缩杆,9.滑轨,10.收集箱,11.壳体,12.斜齿轮,13.销钉,14.限位板,15.隔板,16.扇形刀具,17.导轨,18.弧形槽,19.导销。
具体实施方式
20.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
21.在本发明的描述中,如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
22.本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
23.如图1和图2所示,本发明的一种全自动菠萝采摘机,包括箱体1,箱体1的底侧设置有滑轨9,滑轨9上滑动装配有收集箱10,箱体1的外侧设置有输送带2和壳体11,壳体11位于输送带2的外部,输送带2上设置有多个隔板15;滑轨9的下侧设置有移动机构和升降机构,升降机构的驱动端设置有切割机构。
24.工作时,随着移动机构到达指定位置,升降机构驱动切割机构对菠萝的颈部进行切割并将菠萝输送至输送带2上的两个相邻隔板15之间。在输送带2的作用下,菠萝将落入收集箱10中。待收集箱10装满菠萝后,可将收集箱10从滑轨9中卸下,倒出菠萝,完成一次采摘收集。
25.结合图2,在本发明的一种全自动菠萝采摘机中,移动机构包含两个履带输送机构5,每个履带输送机构5均通过两个支腿3设置在滑轨9的下侧。
26.全车采用履带的传动方式,使其能适应不同的地形。
27.结合图2,在本发明的一种全自动菠萝采摘机中,箱体1的上侧通过销钉13可转动地设置有两个限位板14。
28.采摘过程中,可以通过两个限位板14将收集箱10与箱体1固定在一起,确保收集箱10不会在滑轨9上移动。采摘完毕后,可转动限位板14,使收集箱10与箱体1不再固定在一起,便于将收集箱10从滑轨9上卸下,倒出菠萝。
29.结合图2,在本发明的一种全自动菠萝采摘机中,升降机构包含四个电动伸缩杆8。
30.通过四个电动伸缩杆8可以实现切割机构的上下移动以及将菠萝输送至输送带2
上。
31.结合图3和图4,在本发明的一种全自动菠萝采摘机中,切割机构包含环形外壳6,环形外壳6与四个电动伸缩杆8的驱动端相铰接,环形外壳6上设置有电机7,电机7的驱动端设置有斜齿轮12,斜齿轮12啮合有内齿圈4,内齿圈4的底部设置有导轨17,导轨17上均布有多个弧形槽18,每个弧形槽18中均设置有导销19,导销19上连接有扇形刀具16。
32.启动电机7,电机7通过斜齿轮12和内齿圈4啮合,带动多个扇形刀具16在对应的弧形槽18中移动,从而实现对菠萝颈部的切断,以完成采摘。将菠萝输送至输送带2上的时候,前面的两个电动伸缩杆8可向上移动,使其发生倾斜倒入输送带2上。
33.因此,与现有技术相比,本发明的一种全自动菠萝采摘机,在使用的过程中,发动电机可自动完成对菠萝进行切割、运送一系列过程,大大地提高了采摘效率,降低了人力,避免了采摘时对手的伤害,从而有效地解决了菠萝采摘难的问题,促进了菠萝产业的发展。
34.上述说明示出并描述了发明的若干优选实施例,但如前所述,应当理解发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述发明构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离发明的精神和范围,则都应在发明所附权利要求的保护范围内。
技术特征:
1.一种全自动菠萝采摘机,其特征在于,包括箱体(1),所述箱体(1)的底侧设置有滑轨(9),所述滑轨(9)上滑动装配有收集箱(10),所述箱体(1)的外侧设置有输送带(2)和壳体(11),所述壳体(11)位于所述输送带(2)的外部,所述输送带(2)上设置有多个隔板(15);滑轨(9)的下侧设置有移动机构和升降机构,所述升降机构的驱动端设置有切割机构。2.根据权利要求1所述的全自动菠萝采摘机,其特征在于,所述移动机构包含履带输送机构(5),所述履带输送机构(5)通过多个支腿(3)设置在所述滑轨(9)的下侧。3.根据权利要求2所述的全自动菠萝采摘机,其特征在于,所述履带输送机构(5)的数量为二,每个履带输送机构(5)均通过两个支腿(3)设置在所述滑轨(9)的下侧。4.根据权利要求3所述的全自动菠萝采摘机,其特征在于,所述箱体(1)的上侧通过销钉(13)可转动地设置有限位板(14)。5.根据权利要求4所述的全自动菠萝采摘机,其特征在于,所述限位板(14)的数量为二。6.根据权利要求5所述的全自动菠萝采摘机,其特征在于,所述升降机构包含四个电动伸缩杆(8)。7.根据权利要求6所述的全自动菠萝采摘机,其特征在于,所述切割机构包含环形外壳(6),所述环形外壳(6)与四个所述电动伸缩杆(8)的驱动端相铰接,环形外壳(6)上设置有电机(7),所述电机(7)的驱动端设置有斜齿轮(12),所述斜齿轮(12)啮合有内齿圈(4),所述内齿圈(4)的底部设置有导轨(17),所述导轨(17)上均布有多个弧形槽(18),每个所述弧形槽(18)中均设置有导销(19),所述导销(19)上连接有扇形刀具(16)。8.根据权利要求7所述的全自动菠萝采摘机,其特征在于,所述电机(7)的数量为二。
技术总结
本发明公开了一种全自动菠萝采摘机,包括箱体,所述箱体的底侧设置有滑轨,所述滑轨上滑动装配有收集箱,所述箱体的外侧设置有输送带和壳体,所述壳体位于所述输送带的外部,所述输送带上设置有多个隔板;滑轨的下侧设置有移动机构和升降机构,所述升降机构的驱动端设置有切割机构。该基于人因工程的全自动菠萝采摘机,解决了现有手工采摘菠萝存在效率低,且对手伤害较大的问题。对手伤害较大的问题。对手伤害较大的问题。
技术研发人员:栾飞 赵弘煊 桓源 李烨 仵梦晗 刘明玥 刘珂
受保护的技术使用者:陕西科技大学
技术研发日:2022.01.27
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。