1.本公开涉及搭载于车辆的信息处理装置、方法、非暂时性存储介质以及车辆。
背景技术:
2.在日本特开2020-037309中公开了一种通过在不同的功能系统的管理部间的相互通信能够实现大范围的协同控制的车辆控制系统。在具备将与车辆功能相关的多个输出部的动作控制为最佳的管理部的功能系统中进行该车辆控制。另外,上述车辆控制基于对用于控制规定的车辆功能的多个输入事先进行协调而获得的请求。
3.在日本特开2020-037309所记载的车辆控制系统中,各功能系统仅基于向自身的功能系统直接输入的请求来判断可否协同控制。因此,无法对向各功能系统输入的请求与向其他功能系统输入的请求的矛盾进行检测。另外,对于日本特开2020-037309所记载的车辆控制系统而言,从各功能系统向其他功能系统发送的请求是已经协调后的请求。因此,即便在该协调后的请求与由其他功能系统协调了的请求之间产生冲突,也无法修正请求。
4.因此,在日本特开2020-037309所记载的车辆控制系统中,当请求是跨越多个功能系统的各功能的综合请求或跨越时间的连续的请求的情况下,对于上述请求,存在未被进行良好的协调的情况或3个以上的功能系统的各功能间的协调不成立的可能性。
技术实现要素:
5.本公开提供将车辆控制为多个不同的功能系统的各功能间的动作不存在冲突的信息处理装置、方法、非暂时性存储介质以及车辆。
6.本公开技术的第一方式所涉及的被搭载于车辆的信息处理装置具备处理器。上述处理器构成为根据对于上述车辆的请求来从确定与上述车辆的使用方法、动作相关的上述车辆的举动的多个模式之中选择1个模式。上述处理器构成为使上述车辆的状态在基于状况(state)以及子模式的多个状态之间迁移。在决定了的上述模式中允许上述状况以及上述子模式。上述处理器构成为基于迁移后的上述车辆的状态来控制上述车辆。
7.在本公开技术的第一方式所涉及的信息处理装置中,用于上述处理器使上述车辆的状态迁移的条件取决于所决定的上述模式。
8.本公开技术的第二方式所涉及的由搭载于车辆的信息处理装置的处理器执行的方法包括:根据对于上述车辆的请求来从确定与上述车辆的使用方法、动作相关的上述车辆的举动的多个模式之中决定1个模式;使上述车辆的状态在基于状况以及子模式的多个状态之间迁移;以及基于迁移后的上述车辆的状态来控制上述车辆。在所决定的上述模式中允许上述状况以及上述子模式。
9.本公开技术的第三方式所涉及的非暂时性存储介质储存有能够由搭载于车辆的信息处理装置的1个或者多个处理器执行且使上述1个或者多个处理器执行以下的功能的命令。上述功能包括:根据对于上述车辆的请求来从确定与上述车辆的使用方法、动作相关的上述车辆的举动的多个模式之中决定1个模式;使上述车辆的状态在基于状况以及子模
式的多个状态之间迁移;以及基于迁移后的上述车辆的状态来控制上述车辆。在所决定的上述模式中允许上述状况以及上述子模式。
10.本公开技术的第一方式所涉及的信息处理装置可以被搭载于车辆。
11.根据本公开的信息处理装置,能够通过使用了模式、状况的状态的迁移来集中管理车辆的控制状况。因此,能够将车辆整体恰当地控制为多个不同的功能系统的各功能间的动作不存在冲突。
附图说明
12.以下,参照附图对本发明的示例性实施例的特征、优点、技术及工业重要性进行说明,在附图中相同的附图标记表示相同的构成要素,其中:
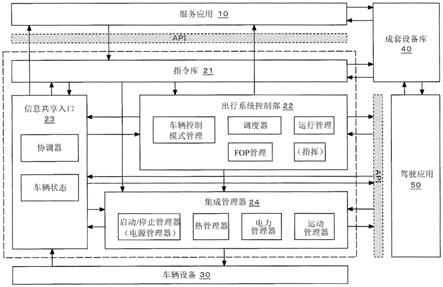
13.图1是包括一个实施方式所涉及的信息处理装置的车辆控制系统的功能框图。
14.图2是主模式中的状态迁移图。
15.图3是行驶状况中的状态迁移图。
16.图4是运动状况中的状态迁移图。
17.图5是输送状况中的状态迁移图。
18.图6是电力基础设施协作状况中的状态迁移图。
19.图7是汽车模式时的各状况下的迁移关联的一个例子。
20.图8是驾驶子模式中的状态迁移图。
21.图9是充电子模式中的状态迁移图。
22.图10是装备供电子模式中的状态迁移图。
23.图11是辅机补充子模式中的状态迁移图。
24.图12是ac供电子模式中的状态迁移图。
25.图13是主模式、状况以及子模式联动的状态迁移的事例1。
26.图14是主模式、状况以及子模式联动的状态迁移的事例2。
27.图15是主模式、状况以及子模式联动的状态迁移的事例3。
28.图16是主模式、状况以及子模式联动的状态迁移的事例4。
29.图17是主模式、状况以及子模式联动的状态迁移的事例5。
30.图18是主模式、状况以及子模式联动的状态迁移的事例6。
31.图19是主模式、状况以及子模式联动的状态迁移的事例7。
32.图20是表示图19的事例7中的子模式间的协调要件的例子。
33.图21是主模式、状况以及子模式联动的状态迁移的事例8。
34.图22是主模式、状况以及子模式联动的状态迁移的事例9。
35.图23是主模式、状况以及子模式联动的状态迁移的事例10。
36.图24是主模式、状况以及子模式联动的状态迁移的事例11。
37.图25是主模式、状况以及子模式联动的状态迁移的事例12。
具体实施方式
38.本公开的信息处理装置通过车辆集成ecu(中央ecu)单体、或者车外云单体、或车辆集成ecu与车外云的协作来提供控制平台的功能。控制平台作为将车辆整体的动作、举动
集成的大脑中枢动作。通过使用该控制平台,能够恰当地控制车辆整体以便多个不同的功能系统的各功能间的动作不存在冲突。
39.实施方式
40.结构
41.图1是包括本公开的一个实施方式所涉及的信息处理装置20的车辆控制系统的功能框图。图1中例示的功能模块具备服务应用10、信息处理装置20、车辆设备30、成套设备库(plant library)40以及驾驶应用50。信息处理装置20包括指令库21、出行系统控制部22、信息共享入口23以及集成管理器24。该车辆控制系统被搭载于汽车等车辆。
42.1.服务应用10
43.服务应用10是被安装实现服务的应用的功能模块。在服务的实现中灵活利用车内外的信息以及车辆的构件。该服务除了包括作为汽车或者作为产品的车辆的实际的工作之外,例如还包括基于设定时刻的与应用(本应用、其他应用)的启动相关的预约、数据库的收集加工、向记录介质的记录、以及向外部的无线发送等。本实施方式的应用构成为经由api(application programming interface)对于信息处理装置20请求(调用)预先在指令库21中规定的抽象的指令。抽象的请求可以带有附带信息(服务执行假定时间、优先级、频度等)。提供服务的企业等通过使用与目的对应的api编程应用,能够提供任意的服务。由企业等公开的api的内容可以根据软件开发者的水平来改变。由此,企业的开发者等能够简易地开发用于实现新的功能的应用。即,在开发时,企业的开发者等不需要了解组装于车辆的电子平台、车辆所具备的设备(促动器、传感器等)的结构、以及车辆的能量(电力、热等)体系等。作为应用,能够例示各种应用。应用与驾驶座ux(usere xperience)、远程服务、maas(mobility as a service)、能量管理服务以及ota(over the air)更新服务等相关。
44.该服务应用10对于指令库21请求各种服务。另外,服务应用10参照信息共享入口23所公开的共享信息。另外,服务应用10从出行系统控制部22将指示应用的启动的触发输入至信息共享入口23。并且,服务应用10能够与成套设备库40之间进行信息的交换。该服务应用10的各应用原则上被在车辆执行,但也可以将应用的一部分云化。
45.2.指令库21
46.指令库21是配备有抽象的api的功能模块。该api从服务应用10实现与和服务相关的抽象的请求(服务api调用)对应的控制。换言之,指令库21将从服务应用10受理到的请求变换为向集成管理器24、出行系统控制部22的请求。作为一个例子,该指令库21具备使以下所示的功能联动而实现的各种指令作为库。
47.(1)将对于车辆设备30(促动器等)的单一或者复合的动作指令具体化的功能。该动作指令是用于实现从服务应用10受理到的请求的指令。
48.(2)输出(发送)车辆控制模式的迁移触发的功能。车辆控制模式决定车辆的举动(作为产品的车辆的使用方法)。
49.(3)进行电源的启动以及停止的功能。电源使请求的实现所需的系统工作。
50.(4)指示对于被输入的能量需求的能量供给源的协调(需求合并、需求加权、可否供给判断、供给源选择)的功能。
51.(5)向信息共享入口23登记共享的信息的功能。使用各种数据来加工以及/或者生成共享的信息。
52.(6)所需的信息向储存器的存储、操作车内外的通信设备的功能。
53.(7)用于使被指定的应用在设定时刻启动的计时器功能。
54.该指令库21对于出行系统控制部22进行指示车辆控制模式的迁移的触发的输出、运行计划的传递、以及预约的通知等。另外,指令库21对于集成管理器24输出控制请求或者服务请求。另外,指令库21从服务应用10受理各种服务的请求。另外,指令库21能够为了公开而将应用的加工信息提供给信息共享入口23。另外,指令库21参照信息共享入口23所公开的共享信息。并且,指令库21能够与成套设备库40之间进行信息的交换。
55.3.出行系统控制部22
56.出行系统控制部22是进行与车辆的举动(使用方法、动作等)相关的控制状况的集权管理、基于运行计划的一系列的任务的推进管理、以及时间表的管理等的功能模块(决定部、状态迁移部)。作为一个例子,该出行系统控制部22具有以下所示的管理功能。
57.(1)车辆控制模式管理功能
58.出行系统控制部22利用下述的构件(多个模式以及状况)来管理车辆整体的控制。出行系统控制部22统管车辆设备30的各结构以及系统的举动,协调与车辆所处的情形(tpo)对应的ux请求。
59.主模式:决定与情形对应的车辆总的概括的使用方法。
60.<汽车模式/电动模式/发电模式/休止模式>
61.状况:管理与顺序的控制局面对应的车辆状态的迁移。
62.<行驶状况/运动状况/输送状况/电力基础设施协作状况>
63.子模式:在单个或多个模式下限定控制目的以及手段。
64.<驾驶子模式/充电子模式/装备供电子模式/辅机补充子模式/ac供电子模式等>
65.(2)时间表管理功能(调度器)
66.出行系统控制部22进行被指定的活动、应用的开始时刻/结束时刻的预约。能够例示计时器充电、预空调。
67.(3)运行管理功能
68.出行系统控制部22在maas的利用中管理基于运行计划表的车辆的移动、输送服务(人流/物流)、滞留服务以及附带任务(指挥功能等)的进展。
69.(4)故障操作(fop)管理功能
70.除了个人所有车辆(pov:personally owned vehicle)以外,在maas中出行系统控制部22也集权管理故障安全以及fop。此外,根据需要,进行主要的子系统的可靠性信息的生成、系统诊断等的搭载。
71.该出行系统控制部22对于集成管理器24输出协调所需的指标、控制允许或者禁止的指示。另外,出行系统控制部22对于服务应用10输出指示应用的启动的触发。另外,出行系统控制部22从指令库21取得指示车辆控制模式的迁移的触发、运行计划以及预约等。另外,出行系统控制部22能够为了公开而将出行系统信息(控制模式、运行状况、ux协调结果等)提供给信息共享入口23。另外,出行系统控制部22参照信息共享入口23公开的共享信息。并且,出行系统控制部22能够对于驾驶应用50提供出行系统信息(驾驶模式、目的地等)、参照驾驶应用50的信息。
72.4.信息共享入口23
73.信息共享入口23是将在全球公开的信息(共享信息)汇集的功能模块。共享信息被服务应用10、指令库21、出行系统控制部22以及集成管理器24等各功能模块参照。还能够从通过通信与车辆集成ecu(中央ecu)连结的各控制域、车外的云实现该共享信息的参照。作为共享信息,能够例示车辆的状态以及车辆周边的状况、车内外的场景、用户需求的检测结果、以及传感器的输入值等信息。该信息共享入口23成为各功能模块不了解共享信息的生成(提供)源就能够参照该共享信息的构造。另外,信息共享入口23可以包括能够加工车辆的行驶场景(时刻、天气、气温等)、车辆利用者的认证结果、储存器的容量等信息的协调器(coordinator)。
74.该信息共享入口23向服务应用10、指令库21、出行系统控制部22、集成管理器24、车辆设备30以及驾驶应用50公开共享信息。另外,信息共享入口23能够从指令库21取得可公开的应用的加工信息。另外,信息共享入口23能够从出行系统控制部22取得可公开的出行系统信息(控制模式、运行状况、ux协调结果等)。另外,信息共享入口23能够从集成管理器24取得可公开的协调结果。另外,信息共享入口23能够从车辆设备30取得可公开的一般信息(传感器、通信、模拟信号等)。信息共享入口23可以作为将从车辆设备30取得的一般信息保持不变地输出至服务应用10的网关来发挥功能。另外,信息共享入口23能够从驾驶应用50取得可公开的驾驶状况(停留判定结果等)。由该信息共享入口23公开的信息原则上被登记(存储)于车辆。也可以将信息的一部分登记(存储)于云。
75.5.集成管理器24
76.集成管理器24是基于出行系统控制部22的控制状况以及可从信息共享入口23参照的各种共享信息来实施来自服务应用10的请求(服务api调用)的受理可否以及物理量限制等的协调并决定用于实现请求的向车辆设备30的最终指令的功能模块(控制部)。作为一个例子,该集成管理器24包括针对以下所示的功能进行管理的管理器。在本实施方式中,集成管理器24构成为将因车辆的装备变更引起的差异(硬件的差异)消除。
77.(1)系统启动/停止管理器(电源管理器)功能
78.集成管理器24基于被请求的服务需求来控制属于车辆的所需的系统的启动以及停止,输出指令(电源开/关、nm触发、通信请求)。
79.(2)电力管理器功能
80.集成管理器24高效地控制车辆中的充放电、电压变换之类的电力的消耗与供给。在本实施方式中,集成管理器24实施对于通过车辆输入(还包括预约)的全部的能量需求(电力、电力量)的公平的供给的协调,进行服务允许的判断、电力收支的上限/下限的决定以及电力供给源(高压电池、充电器等)的选择。
81.(3)热管理器功能
82.集成管理器24高效地控制车辆的排热、制热之类的热的需要与供给。在本实施方式中,集成管理器24实施对于来自服务应用10的发热请求(空调、部件温控)的协调,在满足燃油利用率/排量的要件的范围内输出发动机的启动或者燃料电池(fc)的启动的指令。
83.(4)运动管理器功能
84.集成管理器24向对与车辆的“行驶”、“转弯”、“停止”之类的运动相关的功能进行控制的运动系系统协调请求。在本实施方式中,集成管理器24进行出行系统控制部22中的
要件(行驶状况、运动状况、输送运行管理)以及maas服务等的新请求的反映(起步禁止、车辆的固定请求/解除禁止等)。
85.该集成管理器24被从出行系统控制部22输入协调所需的指标、控制允许/禁止的指示。另外,集成管理器24被从指令库21输入控制请求(或者服务请求)。集成管理器24可以作为将从指令库21输入的控制请求保持不变地输出至车辆设备30的网关来发挥功能。另外,集成管理器24对于车辆设备30输出协调后的指令(actr、通信、驱动器输出等)。另外,集成管理器24能够为了公开而将各管理器的协调结果提供给信息共享入口23。另外,集成管理器24为了协调而参照信息共享入口23公开的共享信息。另外,集成管理器24能够对于驾驶应用50提供运动管理器的回应、协调结果。集成管理器24能够参照与从驾驶应用50请求的车辆运动相关的信息(加速度、转向角等)。
86.此外,除了包括上述的管理器以外,集成管理器24例如可以还包括对与向车辆的导航画面、仪表等的恰当的显示和恰当地提供车辆的操作的电装控制(使用便捷度)相关的功能进行控制的hmi(human machine interface)管理器。
87.6.车辆设备30
88.车辆设备30是具备作为控制信息、动作请求、数据、信号等的最终输入输出目标的传感器、促动器等设备的功能模块。作为车辆设备30,能够例示取得表示车辆的周围的状况的信息、表示车辆的状态的信息的传感器、或者取得与驾驶员涉及的车辆驾驶相关的操作(加速、制动、转向、换挡等)的信息的传感器等。另外,作为车辆设备30,能够例示为了空调系统的启动而使用的设备(igp)、为了车辆运动系系统的启动而使用的设备(igr)、控制发动机的启动的启动器(st)等促动器。
89.该车辆设备30被从集成管理器24输入协调后的指令(actr、通信、驱动器输出等)。另外,车辆设备30能够为了公开而将一般信息(传感器、通信、模拟信号等)提供给信息共享入口23。
90.7.成套设备库40
91.成套设备库40是提供模拟器、可从车内外阅览的数据库以及人工智能(ai)或机器学习算法等环境的功能模块,该模拟器能够实现为了提高服务应用10中的控制性而能够利用的各种模拟(剩余充电所需时间推断、映射变换等)。这些环境的一部分或者全部可以安装于车辆,也可以配置于云。
92.该成套设备库40能够经由规定的api对于服务应用10、指令库21以及驾驶应用50请求所需的信息。成套设备库40能够使服务应用10、指令库21以及驾驶应用50取得作为进行了规定的处理(模拟等)的结果的信息。该成套设备库40的功能原则上被搭载于车辆,但也可以将功能的一部分云化。
93.8.驾驶应用50
94.驾驶应用50是被安装于车辆的应用中的、安装于服务应用10的应用以外的致力于车辆的驾驶以及其辅助的应用。作为该驾驶应用50,能够例示自动停车等远程驾驶、自动驾驶(ad:autonomous driving)、基于maas的自动驾驶(autono-maas)、高级驾驶辅助系统(adas:advanced driver assistance system)。
95.该驾驶应用50能够经由规定的车辆驾驶api参照出行系统控制部22公开的信息(驾驶模式、目的地等)。另外,驾驶应用50能够使出行系统控制部22参照信息。另外,驾驶应
用50能够向信息共享入口23提供驾驶状况(停留判定结果等)。另外,驾驶应用50获取由信息共享入口23公开的共享信息(各种数据)。驾驶应用50能够对于集成管理器24请求车辆运动(加速度、转向角等)。驾驶应用50能够接受来自集成管理器24的回应(协调结果等)。另外,驾驶应用50能够与成套设备库40之间进行信息的交换。该驾驶应用50的各应用原则上被在车辆中执行,但也可以将应用的一部分云化。
96.由于本实施方式的车辆控制系统具备上述的各功能模块,所以仅通过安装不了解控制平台的构造、所规定的指令、车辆的系统构成、以及由车辆处理的能量体系等而开发出的应用,车辆控制系统就能够实现各种服务。
97.控制
98.参照图2~图12对为了在本公开的车辆控制系统中实现各种服务而由出行系统控制部22执行的控制之一亦即车辆控制模式管理具体地进行说明。车辆控制模式管理是与车辆的举动(使用方法、动作等)相关的控制。
99.在车辆控制模式管理中,出行系统控制部22使用以下的控制模式以及控制状况来控制车辆的举动(使用方法、动作等)。
100.(1)主模式(车辆控制模式)
101.1-1:汽车模式
102.1-2:电动模式(定点电动模式)
103.1-3:发电模式(紧急用发电模式)
104.1-4:休止模式
105.(2)状况
106.2-1:行驶状况(待机、启动、行驶、结束)
107.2-2:运动状况(固定、停止、可起步判断、驱动、需停止判断)
108.2-3:输送状况(待机、停留、出发、移动)
109.2-4:电力基础设施协作状况(待机、准备、充电、供电)
110.(3)子模式
111.3-1:驾驶子模式(手动、半自动、全自动)
112.3-2:充电子模式(休止、ac充电、dc充电、接触、非接触、太阳能高压)
113.3-3:装备供电子模式(休止、电动服务、移动准备、乘员上下车、ota)
114.3-4:辅机补充子模式(休止、高压汲取(high-voltage transfer)、太阳能低压)
115.3-5:ac供电子模式(休止、室内acc、室内v2l、外部v2g、外部v2l)
116.(1)主模式
117.主模式决定与情形对应的车辆总的概括的使用方法。在该主模式中,可选择汽车模式、电动模式、发电模式以及休止模式中的任一模式。“汽车模式”是应对于使车辆作为本来的汽车的移动或输送的需求的模式。在该汽车模式中,能够使与车辆的行驶、转弯、停止之类的运动相关的功能及其周边的功能工作。“电动模式(或者定点电动模式)”是应对于使停车中的车辆不作为汽车而作为具有蓄电池的电气装备(电动产品)来利用的需求的模式。在该电动模式中,除了车载设备的灵活利用之外,还与集成管理器24的电力管理器协作来进行包括与电力的需要供给平衡对应的高压汲取或充电器工作的蓄电池的充电等。“发电模式(或者紧急用发电模式)”是应对于使停车中的车辆不作为汽车而作为非常时或者生活
用的发电机来利用的需求的模式。在该发电模式中,执行为了在车外利用电所需的发电。“休止模式”是使车辆均不作为汽车、电动产品以及发电机动作时的默认的模式。
118.图2是主模式中的休止模式(图2的(id=0))、汽车模式(图2的(id=1))、电动模式(图2的(id=2))以及发电模式(图2的(id=3))的状态迁移图。基于以下说明的条件来执行各模式间的迁移。
119.从休止模式向汽车模式
120.若在休止模式中产生了移动需求(图2的[a]),则从休止模式向汽车模式迁移。移动需求(图2的[a])的产生能够根据从车辆的驾驶员存在直接或者间接的操作的情况、检测到来自maas(api)的请求的情况、以及车辆的固定状态被解除(挡位为停车(p)的位置以外)的情况等来判断。
[0121]
从休止模式向电动模式
[0122]
若在休止模式中产生了停车中服务需求(图2的[c]),则从休止模式向电动模式迁移。停车中服务需求(图2的[c])的产生能够根据蓄电池的充放电的状态、检测到外部供电等各种服务的情况等来判断。此外,根据后述的电力基础设施协作状况、充电子模式、装备供电子模式以及辅机补充子模式的状态来实施从该休止模式向电动模式的迁移。
[0123]
从休止模式向发电模式
[0124]
若在休止模式中产生了发电需求(图2的[e]),则休止模式向发电模式迁移。发电需求(图2的[e])的产生能够根据在车内或者车外检测到紧急用发电的请求的情况等来判断。此外,根据后述的ac供电子模式的状态来实施从该休止模式向发电模式的迁移。
[0125]
从汽车模式向休止模式
[0126]
若在汽车模式中判断出移动完成(图2的[b]),则从汽车模式向休止模式迁移。移动完成(图2的[b])能够根据移动需求(图2的[a])结束且车辆的停车完成的情况等来判断。
[0127]
从汽车模式向电动模式
[0128]
若在汽车模式中产生了停车中服务需求(图2的[c’]),则汽车模式向电动模式迁移。停车中服务需求(图2的[c’])与停车中服务需求(图2的[c])同样。此外,根据后述的电力基础设施协作状况、充电子模式、装备供电子模式以及辅机补充子模式的状态来实施从该汽车模式向电动模式的迁移。
[0129]
从电动模式向汽车模式
[0130]
若在电动模式中产生了移动需求(图2的[a’]),则从电动模式向汽车模式迁移。移动需求(图2的[a’])与移动需求(图2的[a])同样。
[0131]
从电动模式向休止模式
[0132]
若在电动模式中判断出停车中服务完成(图2的[d]),则从电动模式向休止模式迁移。停车中服务完成(图2的[d])能够根据停车中服务需求(图2的[c])全部结束的情况等来判断。
[0133]
从电动模式向发电模式
[0134]
若在电动模式中产生了发电需求(图2的[e’]),则从电动模式向发电模式迁移。发电需求(图2的[e’])与发电需求(图2的[e])同样。此外,根据后述的ac供电子模式的状态来实施从该电动模式向发电模式的迁移。
[0135]
从发电模式向休止模式
[0136]
若在发电模式中判断出发电完成(图2的[f]),则从发电模式向休止模式迁移。能够根据发电需求(图2的[e])全部结束的情况等来判断发电完成(图2的[f])。
[0137]
(2)状况
[0138]
状况在主模式的特定模式下实施与顺序的控制阶段对应的车辆状态的迁移。该状况具有在汽车模式中选择的行驶状况、运动状况以及输送状况、在电动模式中选择的电力基础设施协作状况。在各状况中,车辆状态根据控制阶段如以下那样迁移。
[0139]
2-1:行驶状况
[0140]
行驶状况在汽车模式下使状态迁移。在该行驶状况中取得的车辆的状态包括待机、启动、行驶以及结束的各状态。“待机”表示车辆控制系统的初始状态。在“待机”中,若存在规定的事件的指示,则开始车辆的行驶(旅行)的准备,若不存在指示,则移至休眠状态。“启动”表示为了车辆开始移动而执行动力总成系统的启动的状态。在“启动”中,发送启动请求(起动请求)。“行驶”表示动力总成系统的启动完成而能够产生驱动力的状态。“结束”表示不管是车辆的行驶中或停止中均无法产生驱动力的状态。
[0141]
图3是行驶状况中的待机(图3的(id=0))、启动(图3的(id=1))、行驶(图3的(id=2))以及结束(图3的(id=3))的状态迁移图。基于以下说明的条件来执行各状态间的迁移。
[0142]
从待机向启动
[0143]
若在待机状态下判断出旅行开始(图3的[a]),则从待机状态向启动状态迁移。能够根据从车辆的驾驶员存在直接或者间接的操作的情况以及检测到来自maas(api)的请求的情况等来判断旅行开始(图3的[a])。
[0144]
从启动向行驶
[0145]
若在启动状态下判断出动力总成启动(图3的[b]),则从启动状态向行驶状况迁移。在车辆为混合动力汽车(hev)、电动汽车(ev)以及插电混合动力汽车(phev)的情况下,能够根据动作状态成为ready-on来判断动力总成启动(图3的[b])。在车辆是将内燃机作为发动机的汽车(传统车)的情况下,能够根据发动机完全燃烧来判断动力总成启动(图3的[b])。
[0146]
从行驶向结束
[0147]
若在行驶状况下判断出动力总成停止(图3的[c]),则行驶状况向结束状态迁移。能够根据来自车辆的驾驶员或maas(api)的请求被撤回的情况、车辆的动作状态成为ready-off来判断动力总成停止(图3的[c])。
[0148]
从结束向待机
[0149]
若在结束状态下判断出旅行结束(图3的[d]),则从结束状态向待机状态迁移。能够根据车辆停止且被固定(挡位为停车(p)的位置)来判断旅行结束(图3的[d])。
[0150]
从结束向启动
[0151]
若在结束状态下判断出动力总成再启动(图3的[a’]),则从结束状态向启动状态迁移。能够根据从车辆的驾驶员再次存在直接或者间接的操作的情况或再次检测到来自maas(api)的请求的情况等来判断动力总成再启动(图3的[a’])。
[0152]
从启动向结束
[0153]
若在启动状态下判断出动力总成启动失败(图3的[c’]),则从启动状态向结束状
态迁移。例如能够根据即便经过规定的时间也无法检测到动力总成启动(图3的[b])等来判断动力总成启动失败(图3的[c’])。
[0154]
2-2:运动状况
[0155]
运动状况在汽车模式下使状态迁移。在该运动状况中取得的车辆的状态包括固定、停止、可起步判断、驱动以及需停止判断的各状态。“固定”表示车辆控制系统的初始状态。在“固定”中,允许车辆不移动的前提下的服务以及活动。在此期间,根据需要禁止车辆的固定状态的解除。“停止”表示因主要道路状况以外的外部因素而无法使车辆起步的状态。在“停止”中,车辆通过制动的保持而停止。“可起步判断”表示根据基于道路状况等的驾驶主权者(驾驶员等)的意思来通过制动的保持使车辆暂时停止的状态。“驱动”表示按照驾驶主权者(驾驶员等)的意思一边适当地产生驱动力一边实施车辆运动(行驶等)的状态。“需停止判断”表示主要因道路状况以外的外部因素而需要使车辆停止、无法允许动力总成系统的驱动力的产生的状态。
[0156]
图4是运动状况中的固定(图4的(id=0))、停止(图4的(id=1))、可起步判断(图4的(id=2))、驱动(图4的(id=3))以及需停止判断(图4的(id=4))的状态迁移图。可起步判断是在驱动力产生的允许中被选择的状态。需停止判断是在车辆的运动中被选择的状态。驱动是在驱动力产生的允许中且车辆的运动中被选择的状态。基于以下说明的条件来执行各状态间的迁移。
[0157]
从固定向停止
[0158]
若在固定状态下判断出固定解除(图4的[a]),则从固定状态向停止状态迁移。能够根据挡位为停车(p)的位置以外(p锁定解除)且停车制动被解除的情况等来判断固定解除(图4的[a])。
[0159]
从停止向可起步判断
[0160]
若在停止状态下判断出可驱动(图4的[b]),则从停止状态向可起步判断状态迁移。能够根据车辆的动作状态成为ready-on且存在车辆运动系系统的可靠性的情况等来判断可驱动(图4的[b])。
[0161]
从可起步判断向驱动
[0162]
若在可起步判断状态下判断出有驱动意思(图4的[c]),则从可起步判断状态向驱动状态迁移。能够根据挡位为前进(d)或者倒车(r)的位置且制动被断开(无制动踏板的踩踏)的情况等来判断有驱动意思(图4的[c])。
[0163]
从驱动向需停止判断
[0164]
若在驱动状态下判断出不可驱动(图4的[d]),则从驱动状态向需停止判断状态迁移。能够根据车辆的动作状态为ready-off的情况、车辆运动系系统的可靠性消失(系统错误)的情况或者通过指挥功能(conductor function)等做出即时停止的判定的情况等任一情况来判断不可驱动(图4的[d])。指挥功能是能够限制(锁定)处于可移动的状态的车辆的动作的功能。
[0165]
从需停止判断向停止
[0166]
若在需停止判断状态下判断出车辆停止(图4的[a’]),则从需停止判断状态向停止状态迁移。能够根据车辆的速度(车速)为零或者相当于停止的大致为零的情况等来判断车辆停止(图4的[a’])。
[0167]
从可起步判断向停止
[0168]
若在可起步判断状态下判断出发车待机(图4的[a”]),则从可起步判断状态向停止状态迁移。能够根据发车准备因指挥功能等而未完成的情况或者根据误操作而防错工作的情况等来判断发车待机(图4的[a”])。
[0169]
从驱动向可起步判断
[0170]
若在驱动状态下判断出有停止意思(图4的[b’]),则从驱动状态向可起步判断状态迁移。能够根据制动接通(踩踏制动踏板)且车速为零或者相当于停止的大致为零的情况等来判断有停止意思(图4的[b’])。
[0171]
从需停止判断向驱动
[0172]
若在需停止判断状态下判断出可驱动(图4的[c’]),则从需停止判断状态向驱动状态迁移。可驱动(图4的[c’])与可驱动(图4的[b])同样,能够根据车辆的动作状态为ready-on且存在车辆运动系系统的可靠性的情况等来判断。
[0173]
从停止向需停止判断
[0174]
若在停止状态下判断出车辆滚动(roll)(图4的[d’]),则从停止状态向需停止判断状态迁移。能够根据停止的车辆开始了前进或者后退的情况等来判断车辆滚动(图4的[d’])。
[0175]
从停止、可起步判断、驱动、需停止判断向固定
[0176]
若在停止、可起步判断、驱动以及需停止判断的任一状态下判断出车辆固定(图4的[e]),则向固定状态迁移。能够根据挡位为停车(p)的位置的情况或者停车制动工作的情况等来判断车辆固定(图4的[e])。
[0177]
2-3:输送状况
[0178]
输送状况在汽车模式下使状态迁移。在该输送状况中取得的车辆的状态包括待机、停留、出发以及移动的各状态。“待机”表示车辆控制系统的初始状态。在将车辆作为无出行需求的个人所拥有车辆(pov)使用的情况下,选择“待机”。“停留”表示实现用于中途停靠的目的地处的人员的上下车或货物的装卸等的停车以及停车所附带的任务的状态。“出发”表示实施奔向下一目的地时的即将发车之前的准备或检查的状态。在“出发”中,维持状态直至准备或检查完成为止。“移动”表示实现输送中的计划进展状况(参照其他的信息)、与目的对应的任务序列的状态。
[0179]
图5是输送状况中的待机(图5的(id=0))、停留(图5的(id=1))、出发(图5的(id=2))以及移动(图5的(id=3))的状态迁移图。基于以下说明的条件来执行各状态间的迁移。
[0180]
从待机向停留
[0181]
若在待机状态下判断出运行开始(图5的[a]),则从待机状态向停留状态迁移。能够根据受理了移动服务的开始的情况等来判断运行开始(图5的[a])。作为该停留所附带的主要的任务,能够例示其他状况的迁移条件的切换等。
[0182]
从停留向出发
[0183]
若在停留状态下判断出发车准备(图5的[b]),则从停留状态向出发状态迁移。能够根据检测到表示为到达了出发预定时刻的信息的情况等来判断发车准备(图5的[b])。作为该出发所附带的主要的任务,能够例示人流服务中的自动门的关门、关闭动作途中的车
辆固定解除的禁止等。
[0184]
从出发向移动
[0185]
若在出发状态下判断出发车(图5的[c]),则从出发状态向移动状态迁移。能够根据上述的行驶状况迁移至驱动状态的情况等来判断发车(图5的[c])。作为该出发所附带的主要的任务,能够例示与人流相关的各种公告等。
[0186]
从移动向停留
[0187]
若在移动状态下判断出移动完成(图5的[d]),则从移动状态向停留状态迁移。能够根据检测到表示为抵达了目的地的信息的情况等来判断移动完成(图5的[d])。作为该停留所附带的主要任务,能够例示发送车辆固定的指令、人流服务中的自动门的开门等。
[0188]
从停留向待机
[0189]
若在停留状态下判断出运行结束(图5的[e]),则向待机状态迁移。能够根据移动服务完成的情况、受理了移动服务的中止的情况等来判断运行结束(图5的[e])。作为该待机所附带的主要任务,能够例示迁移条件的复位等。
[0190]
2-4:电力基础设施协作状况
[0191]
电力基础设施协作状况在电动模式下使状态迁移。在该电力基础设施协作状况中取得的车辆的状态包括待机、准备、充电以及供电的各状态。“待机”表示没有基础设施协同的请求的初始状态。“准备”表示在识别到基础设施协同的请求之后的、车辆正等待充电或者放电(供电)的工序的指定的状态或者切换这些工序的途中的状态。“充电”表示是从基础设施向车辆(的蓄电池)实施充电的充电工序的状态。“供电”表示是从车辆(的蓄电池)向基础设施供给能量的供给工序的状态。
[0192]
图6是电力基础设施协作状况中的待机(图6的(id=0))、准备(图6的(id=1))、充电(图6的(id=2))以及供给(图6的(id=3))的状态迁移图。基于以下说明的条件来执行各状态间的迁移。
[0193]
从待机向准备
[0194]
若在待机状态下判断出协同开始(图6的[a]),则从待机状态向准备状态迁移。能够根据检测到基础设施协同的请求的情况等来判断协同开始(图6的[a])。
[0195]
从准备向待机
[0196]
若在准备状态下判断出协同结束(图6的[b]),则从准备状态向待机状态迁移。能够根据检测不到基础设施协同的请求的情况等来判断协同结束(图6的[b])。
[0197]
从准备向充电
[0198]
若在准备状态下判断出充电开始(图6的[c]),则从准备状态向充电状态迁移。能够根据从基础设施侧对于车辆指示了充电的情况等来判断充电开始(图6的[c])。
[0199]
从充电向准备
[0200]
若在充电状态下判断出充电结束(图6的[d]),则从充电状态向准备状态迁移。能够根据从基础设施侧对于车辆进行了充电结束的指示或者供电开始的指示的情况等来判断充电结束(图6的[d])。从充电向供电的工序切换也在从充电状态暂且返回至准备状态之后向供电状态迁移。
[0201]
从准备向供电
[0202]
若在准备状态下判断出供电开始(图6的[e]),则从准备状态向供电状态迁移。能
够根据从基础设施侧对于车辆指示了供电的情况等来判断供电开始(图6的[e])。
[0203]
从供电向准备
[0204]
若在供电状态下判断出供电结束(图6的[f]),则从供电状态向准备状态迁移。能够根据从基础设施侧对于车辆进行了供电结束的指示或者充电开始的指示的情况等来判断供电结束(图6的[f])。从供电向充电的工序切换也在从供电状态暂且返回至准备状态之后向充电状态迁移。
[0205]
图7中表示了汽车模式时的各状况(行驶、运动、输送)下的迁移关联的一个例子。如图7所示,在本实施方式的车辆控制模式管理中,通过主模式以及各状况的单个状态或者多个状态的组合来禁止向其他状态的迁移,由此避免各种请求的干涉,通过向其他状态的强制性地迁移来避免控制停滞等。
[0206]
图7的<a1>若产生旅行开始请求而主模式从休止向汽车迁移,则行驶状况从待机向启动迁移。图7的<a2>在maas的移动服务的情况下,还与上位的移动服务请求进行联动。
[0207]
图7的<b1>若行驶状况在ready-on之后迁移至行驶,则运动状况迁移至可起步判断。图7的<b2>在maas的移动服务的情况下,保持运动状况的停止状态直至出发准备完成(在输送状况中迁移至出发)为止。
[0208]
图7的<c>在maas的移动服务的情况下,当存在停留的请求时,在运动状况中禁止向可起步判断的迁移。
[0209]
图7的<d>当在行驶中判断出ready-off的情况下,使运动状况向需停止判断迁移,使车辆停止而不输出驱动力。
[0210]
图7的<e1>在车辆的行驶结束时,使运动状况迁移至固定状态而使旅行完成。然后,图7的<e2>使主模式从汽车向休止迁移而完成车辆的使用。图7的<e0>在maas的移动服务的情况下,根据输送状况从停留迁移至待机,来使行驶状况从结束向待机迁移。
[0211]
(3)子模式
[0212]
子模式在单个或多个主模式下限定控制目的以及手段。该子模式包括驾驶子模式、充电子模式、装备供电子模式、辅机补充子模式以及ac供电子模式。在各子模式中,车辆状态根据控制目的或手段如以下那样迁移。
[0213]
3-1:驾驶子模式
[0214]
驾驶子模式在汽车模式下使状态迁移。在该驾驶子模式中取得的车辆的状态包括手动、半自动以及全自动的各状态。“手动”表示车辆控制系统的初始状态,是驾驶员主权的驾驶状态(手动且有人)。自适应巡航控制(acc)、车道跟踪辅助(lta)等驾驶辅助功能的工作也在手动状态下执行。“半自动”表示虽是自动驾驶系统主权的驾驶状态、但以在有事时向驾驶员移交驾驶主权为前提的状态(自动且有人)。该半自动设想了汽车技术协会(sae)定义的自动驾驶的等级4以下。“全自动”表示以在自动驾驶系统主权的驾驶状态下即便驾驶员不在驾驶也成立为前提的状态(自动且无人)。该全自动设想了汽车技术协会(sae)定义的自动驾驶的等级5以上。远程停车功能的工作能够在全自动状态下执行。
[0215]
图8是驾驶子模式中的手动(图8的(id=0))、半自动(图8的(id=1))、以及全自动(图8的(id=2))的状态迁移图。基于以下说明的条件来执行各状态间的迁移。
[0216]
从手动向半自动
[0217]
若在手动状态下判断出自动驾驶开始(图8的[a]),则从手动状态向半自动状态迁移。能够根据从车辆的驾驶员存在自动驾驶(等级1~等级4)的请求的情况等来判断自动驾驶开始(图8的[a])。
[0218]
从半自动向手动
[0219]
若在半自动状态下判断出自动驾驶结束(图8的[b]),则从半自动状态向手动状态迁移。能够根据从车辆的驾驶员存在撤回自动驾驶(等级1~等级4)的请求的情况、退出自动驾驶的对象区域(旅行完成)的情况、在自动驾驶系统的错误后将主权移交给驾驶员(转让完成)的情况等来判断自动驾驶结束(图8的[b])。
[0220]
从半自动向全自动
[0221]
若在半自动状态下判断出等级提升(图8的[c]),则从半自动状态向全自动状态迁移。能够根据从车辆的驾驶员或maas的移动服务存在自动驾驶(等级5以上)的请求的情况、存在远程停车(入库/出库)的受理的情况、检测到驾驶员的昏厥(死人判定)的情况等来判断等级提升(图8的[c])。
[0222]
从全自动向半自动
[0223]
若在全自动状态下判断出等级下降(图8的[d]),则从全自动状态向半自动状态迁移。能够根据识别到车辆的驾驶员且存在自动驾驶(等级1~等级4)的请求的情况等来判断等级下降(图8的[d])。
[0224]
从手动向全自动
[0225]
若在手动状态下判断出自动驾驶开始(图8的[e]),则从手动状态向全自动状态迁移。能够根据从车辆的驾驶员或maas的移动服务存在自动驾驶(等级5以上)的请求的情况、存在远程停车(入库/出库)的受理的情况等来判断自动驾驶开始(图8的[e])。
[0226]
从全自动向手动
[0227]
若在全自动状态下判断出自动驾驶结束(图8的[f]),则从全自动状态向手动状态迁移。能够根据从车辆的驾驶员存在撤回自动驾驶(等级5以上)的请求的情况、退出自动驾驶的对象区域(旅行完成)的情况、完成了代客停车涉及的出库的情况等来判断自动驾驶结束(图8的[f])。
[0228]
3-2:充电子模式
[0229]
充电子模式在电动模式下使状态迁移。在该充电子模式中取得的车辆的状态包括休止、ac充电、dc充电、非接触、接触以及太阳能高压的各状态。“休止”表示未实施车辆的充电时的默认的状态。“ac充电”、“dc充电”、“非接触”、“接触”以及“太阳能高压”分别表示正执行以下所示的车辆的充电的状态。
[0230]
ac充电表示选择了基于交流电源向车辆的蓄电池的充电的状态。在进行了由用户向ac电源设备的插头插入涉及的充电(包括基于计时器启动的开始)、车辆的基础设施协同(v2g)的过程中的ac电力的受电、停车中服务时的由ac充电器向车辆装备的直接电力供给(预空调、个人房间使用等)等时选择该ac充电。作为用于向ac充电状态迁移的触发,能够例示从用户输入的插头连接操作、预空调请求以及个人房间请求或从系统请求的计时器设定时刻到达、以及v2x/vpp等。
[0231]
dc充电表示选择了由直流电源向车辆的蓄电池的充电或者从蓄电池的放电的状态。在进行了由用户向dc电源设备的插头插入的充电、车辆的基础设施协同(v2g)的过程中
的dc电力的受电或者供电、与停车中服务时并行的电力供给等时选择该dc充电。作为用于向dc充电状态迁移的触发,能够例示从用户输入的插头连接操作、预空调请求以及个人房间请求、或由系统判断的计时器设定时刻到达、以及v2x/vpp等。
[0232]
非接触表示选择了向不与充电设备接触的车辆的蓄电池的充电的状态。在对于设置于充电站的车辆进行了用户的开关(sw)操作涉及的手动充电等时选择该非接触。作为用于向非接触状态迁移的触发,能够例示在车辆的充电站设置之后从用户输入的sw操作等。
[0233]
接触表示选择了向与充电设备接触的车辆的蓄电池的充电的状态。在对于被定位以及配对后的设置于充电站的车辆进行了基于充电站与车辆的耦合的充电等时选择该接触。作为用于向接触状态迁移的触发,能够例示在车辆的定位以及配对之后完成了车辆向充电站的设置等。
[0234]
太阳能高压表示选择了从缓冲用电池向高压的蓄电池的充电的状态。缓冲用电池暂时储存由太阳能发电系统产生的电力。在缓冲用电池的蓄电量(soc)达到规定的阈值的情况下等选择该太阳能高压。作为用于向太阳能高压迁移的触发,能够例示由系统判断的缓冲用电池的蓄电量到达阈值等。
[0235]
图9是充电子模式中的休止(图9的(id=0))、ac充电(图9的(id=1))、dc充电(图9的(id=2))、非接触(图9的(id=3))、接触(图9的(id=4))以及太阳能高压(图9的(id=5))的状态迁移图。若在休止状态下产生了ac充电、dc充电、非接触、接触以及太阳能高压中的至少1个请求,则从休止状态向被请求的充电的状态迁移。若不存在任何充电的请求,则迁移至休止状态。在多个请求重复的情况下等,ac充电以及dc充电的优先顺位最高,太阳能高压的优先顺位最低。对于ac充电与dc充电而言,选择在先产生了充电请求的方式的状态(先胜)。在同时产生了请求的情况下,选择dc充电。另外,非接触与接触处于排他关系,不同时成立。
[0236]
3-3:装备供电子模式
[0237]
装备供电子模式在汽车模式、电动模式以及发电模式下使状态迁移。在该装备供电子模式中取得的车辆的状态包括休止、电动服务、移动准备、乘员上下车以及ota的各状态。“休止”表示未实施与装备供电相关的服务时的默认的状态。“电动服务”、“移动准备”、“乘员上下车”以及“ota”分别表示正实施与以下所示的装备供电相关的服务的状态。
[0238]
电动服务表示选择了在直接的行驶以外使用了车辆的固有的服务的提供的状态。该电动服务是在汽车模式、电动模式以及发电模式全部中可选择的状态。作为电动服务被选择的固有的服务,能够例示监视功能、连接灵活利用功能(connected vehicle function)等服务。
[0239]
移动准备表示选择了在车辆的行驶前的准备中独特的固有的服务的提供的状态。该移动准备是仅在电动模式(或者从电动服务持续向乘员上下车迁移的情况下的汽车模式)中可选择的状态。作为选择移动准备的固有的服务,能够例示预空调功能等服务。
[0240]
乘员上下车表示选择了在车辆的行驶中的门开闭的前后特有的固有的服务的提供的状态。该乘员上下车是在汽车模式、电动模式以及发电模式全部中可选择的状态。作为选择乘员上下车的固有的服务,能够例示电子后视镜或招待功能等服务。
[0241]
ota表示选择了基于无线通信的重新编程的提供的状态。该ota是仅在电动模式中可选择的状态。ota是以使其他服务全部停止为前提而选择的状态。
[0242]
图10是装备供电子模式中的休止(图10的(id=0))、电动服务(图10的(id=1))、移动准备(图10的(id=2))、乘员上下车(图10的(id=3))以及ota(图10的(id=4))的状态迁移图。若在休止中产生了电动服务、移动准备、乘员上下车以及ota中的至少1个请求,则从“休止”向能够提供被请求的服务的状态迁移。若不存在任何服务提供的请求,则迁移至休止状态。在多个请求重复的情况下,ota的优先顺位最高,对于其他状态而言,在上位包括下位的条件下,优先顺位按照乘员上下车、移动准备以及电动服务的顺序变高。
[0243]
3-4:辅机补充子模式
[0244]
辅机补充子模式在汽车模式、电动模式以及发电模式下使状态迁移。在该辅机补充子模式中取得的车辆的状态包括休止、高压汲取以及太阳能低压的各状态。“休止”表示未实施车辆的充电时的默认的状态。“高压汲取”以及“太阳能低压”分别表示正实施以下所示的车辆的充电的状态。
[0245]
高压汲取表示选择了电力汲取处理的状态。在电力汲取处理中,由于辅机电池的容量在长期的车辆的停车时降低,所以电力从高压电池向辅机电池移动。该高压汲取是仅在电动模式中可选择的状态。高压电池的电力汲取功能以无论用户的指示等如何系统均自动启动为前提。
[0246]
太阳能低压表示选择了从缓冲用电池向高压的蓄电池的充电的状态。缓冲用电池在车辆的停车中等暂时储存由太阳能发电系统产生的电力。该太阳能低压是在汽车模式、电动模式以及发电模式全部中可选择的状态。从缓冲用电池向高压的蓄电池的充电功能以检测到缓冲用电池的蓄电量(soc)达到规定的阈值的系统自动启动为前提。
[0247]
图11是辅机补充子模式中的休止(图11的(id=0))、高压汲取(图11的(id=1))以及太阳能低压(图11的(id=2))的状态迁移图。若在休止中产生了高压汲取以及太阳能低压中的至少1个请求,则从休止向能够提供所请求的充电的状态迁移。若不存在任何充电的请求,则迁移至休止状态。在多个请求重复的情况下,高压汲取的状态比太阳能低压的状态优先。
[0248]
3-5:ac供电子模式
[0249]
ac供电子模式在汽车模式、电动模式以及发电模式下使状态迁移。在该ac供电子模式中取得的车辆的状态包括休止、室内acc、室内v2l、外部v2g、以及外部v2l的各状态。“休止”表示未实施车辆的充电时的默认的状态。“室内acc”、“室内v2l”、“外部v2g”以及“外部v2l”分别表示实施以下所示的车辆的充电的状态。
[0250]
室内acc表示通过用户对专用的开关(sw)操作选择了附件设备的利用的状态。该室内acc是在汽车模式以及电动模式中可选择的状态。室内acc能够与固有的停车中服务组合选择。
[0251]
室内v2l表示通过固有的指令操作选择了紧急用发电的状态。该室内v2l是仅在发电模式中可选择的状态。为了进行紧急用发电,进行发动机的启动、fc(燃料电池)的利用的允许。
[0252]
外部v2g表示在将专用的夹具插入至车辆之后基于来自外部的指令选择了与房屋、系统协同的ac充放电的状态。该外部v2g是仅在电动模式中可选择的状态。
[0253]
外部v2l表示在将专用的夹具插入至车辆之后基于固有的指令操作选择了紧急用发电的状态。该外部v2l是仅在发电模式中可选择的状态。为了进行紧急用发电,进行发动
机的启动、fc(燃料电池)的利用的允许。
[0254]
图12是ac供电子模式中的休止(图12的(id=0))、室内acc(图12的(id=1))、室内v2l(图12的(id=2))、外部v2g(图12的(id=3))以及外部v2l(图12的(id=4))的状态迁移图。若在休止中产生了室内acc、室内v2l、外部v2g以及外部v2l中的至少1个请求,则从休止向所请求的充电的状态迁移。若不存在任何充电的请求,则迁移至休止状态。
[0255]
具体例
[0256]
进而参照图13~图25,对上述的主模式的各状况(汽车、电动、发电、休止)、各状态(行驶、运动、输送、电力基础设施协同)以及各子模式(驾驶、充电、装备供电、辅机补充以及ac供电)联动的状态迁移的具体事例进行说明。在以下的说明中,将主模式、状况以及子模式的状态称为“出行系统状态”。
[0257]
事例1
[0258]
图13中表示将与电力基础设施协作状况联动的充电子模式以及ac供电子模式的迁移的例子(事例1)汇总的图。在不存在基础设施协同的指示的情况下,状态被固定为“待机状况”。根据基础设施协同的指示,迁移至“准备状况”、“充电状况”以及“供电状况”的各状态。在协同中的充电与供电的切换时,暂且经由“准备状况”切换状态。在车辆因车辆的状况而无法遵照基础设施协同的指示的情况下也同样。在图13的(*1)中,仅可充电。在图13的(*2)中,仅可放电。
[0259]
事例2
[0260]
图14中表示将驾驶子模式状态涉及的向行驶状况的“启动”状态的迁移允许条件的切换的例子(事例2)汇总的图。在图14中,示出了在手动、半自动以及全自动的各状态下允许从行驶状况的待机向启动的状态迁移的判定条件。图14的(*1)应用于来自车外(out-car)的远程操作的情况。另外,图14的(*2)与具有驾驶员资格(高龄老人等)的情况联动。
[0261]
事例3
[0262]
图15中表示将汽车模式中的状况状态涉及的直接对运动系的请求的例子(事例3)汇总的图。如图15所示,通过对于控制主要功能的管理部(集成管理器、运动管理器)输入出行系统状态,能够一并统管跨越多个功能的车辆整体的举动。另外,能够根据出行系统状态来决定直接的指令。
[0263]
事例4
[0264]
图16中表示将汽车模式中的上位请求的出行系统状态涉及的出入口协调的例子(事例4)汇总的图。如图16所示,通过对于控制主要功能的管理部(集成管理器、运动管理器)输入出行系统的状态,能够一并统管跨越多个功能的车辆整体的举动。另外,对于来自上位的动作请求,能够通过与出行系统状态或者任意的场景信息的组合来实施输出的禁止、限制。
[0265]
事例5
[0266]
图17中表示将对于输送服务中的活动的协调的例子(事例5)汇总的图。输送服务中的基本流程如下所述。在车辆抵达停留地时,若存在乘员的上下车,则可在将车辆固定之后打开自动门。出发前在发车待机的状态实施自动门的全关。如图17所示,通过对于控制主要功能的管理部输入出行系统状态,能够一并统管跨越多个功能的车辆整体的举动。另外,能够根据出行系统状态来决定直接的指令。
[0267]
事例6
[0268]
图18中表示将出行系统状态与场景信息涉及的汽车模式中的电源协调的例子(事例6)汇总的图。如图18所示,通过对于控制主要功能的管理部输入出行系统状态,能够一并统管跨越多个功能的车辆整体的举动。另外,能够根据出行系统状态来决定直接的指令。另外,对于来自上位的动作请求,能够通过与出行系统状态或者任意的场景信息的组合来实施输出的禁止、限制。
[0269]
事例7
[0270]
图19中表示将充放电请求协调涉及的子模式迁移状态的组合例汇总的图(事例7)。图19以充电子模式的各状态为列、以装备供电子模式以及辅机补充子模式的各状态为行进行记载。示出了各组合中的仅可执行充电、仅可执行放电、充电与放电可共存。
[0271]
在装备供电子模式为ota且充电子模式为ac充电或者dc充电的情况下(图19的(*1)),在伴有插头连接的充电中不应用行驶前提的装备驱动。但是,在拔掉插头后允许迁移。在装备供电子模式为休止以外且充电子模式为太阳能高压的情况下(图19的(*2)),由于汲取中的损耗大于充电电力的概率高,所以不应用太阳能充电。在充电子模式为太阳能高压的情况下(图19的(*3)),由于在太阳能系统中高压充电与低压补充处于排他关系,所以使高压侧优先。在辅机补充子模式为高压汲取且充电子模式为ac充电、dc充电、非接触或者接触的情况下(图19的(*4)),若该充电系统是重新编程对象,则仅执行汲取。此外,为了避免停电引起的重新编程失败,任何情况下均在预先积蓄所需的能量之后进行重新编程的执行。在辅机补充子模式为太阳能低压且充电子模式为ac充电、dc充电、非接触或者接触的情况下(图19的(*5)),在通常充电中也假定辅机电池的容量降低时的基于主ddc(dcdc转换器)的促进补给。在充电子模式为ac充电、dc充电、非接触或者接触的情况下(图19的(*6)),和行驶中同样将现有的ddc与太阳能汲取用ddc的同时驱动的允许作为前提。在装备供电子模式为移动准备且充电子模式为非接触或者接触的情况下(图19的(*7)),针对伴有一部分用户的乘车的服务(个人房间充电等),存在需要拒绝的可能性。在装备供电子模式为ota且充电子模式为非接触或者接触的情况下(图19的(*8)),可能在行驶前提的驾驶员上下车前后需要非接触充电的暂时中断。
[0272]
图20中表示装备供电子模式与辅机补充子模式之间的协调要件。在装备供电子模式为ota的情况下装备供电优先,在装备供电子模式为ota以外的情况下,装备供电与辅机补充可共存。各供电以及高压汲取中的每次各自的采用与否最终取决于基于优先级排序的需求供给协调。对于供电与太阳能低压的共存而言,行驶过渡后的无缝的持续也能够实现。若能够在出行系统实现共存,则在取消了缓冲用电池时也能够期待能量的有效利用。
[0273]
事例8
[0274]
图21中表示将ac供电子模式与其他充放电的子模式的组合中的协调要件例(事例8)汇总的图。图21以ac供电子模式的各状态为列、以充电子模式、装备供电子模式以及辅机补充子模式的各状态为行来进行示出。图21中的a~h表示以下内容。
[0275]
图21的a:充电与放电可共存
[0276]
图21的b:仅可充电或者放电
[0277]
图21的c:仅可ac供电
[0278]
图21的d:排他(先胜)
[0279]
图21的e:可实现ac中发电途中的放电侧迁移(反之不可)
[0280]
图21的f:排他(适当切换)
[0281]
图21的g:仅在特定的“电动服务”中可共存(其他仅可充电或者放电)
[0282]
图21的h:仅在“移动准备”未实施时仅可迁移至ac(其他为排他先胜)
[0283]
其中,图21的nothing表示为无该组合。对于带括号的可共存(图21的(a))而言,允许出行系统中的迁移,最终通过集成管理器的电力管理器在活动间的优先顺位协调、基于活动侧的场景信息等的请求可否判断等来决定。
[0284]
事例9
[0285]
图22中示出ac充电的控制流程的例子(事例9)。
[0286]
图22的<a>通过充电插头连接操作的边缘检测或者连接中的来自时间表管理的时刻设定通知而开始模式。由此,输出igb信号,启动动力总成充电系系统。在默认的充电计时器有效且时刻未达到时,也为了计算所需时间而在边缘检测后实施至ac继电器连接。
[0287]
图22的<b>接受计时器请求并根据基础设施、电池状态以及目标充电量计算所需时间来预约启动。此外,当在刚刚连接之后时间不足时立即启动。
[0288]
图22的<c>接受充电方式的选择结果的传递以及执行请求,通过动力总成管理充电执行(包括停电、拔插头等引起的中断迁移)。而且,在充电完成或者中止确定后,向出行系统传递结果且控制模式结束。
[0289]
事例10
[0290]
图23中示出高压辅机电池补充控制流程的例子(事例10)。
[0291]
图23的<a>在接收来自基础设施的vpp实施请求后,使切换状况迁移至“准备”,使主模式迁移至“电动”。
[0292]
图23的<b>根据来自所连接的基础设施的信息识别为充放电方式是ac。
[0293]
图23的<c>接受基础设施请求,使充电子模式迁移至“ac充电”来执行充电。
[0294]
图23的<d>在充电结束后,使切换状况返回至“准备”。存在来自基础设施的中断请求的情况也同样。
[0295]
在来自基础设施的供电请求时,使ac供电子模式迁移至“外部v2g”来执行。
[0296]
与充电同样,使切换状况返回至“准备”并结束供电。通过时间保护等适当地在“待机”中完成模式。这样,通过充放电切换状况的设定,能够实施充电与供电的排他协调,避免控制干涉。
[0297]
事例11
[0298]
图24中示出停车中服务、高压汲取以及ac充电涉及的复合控制流程的例子(事例11)。
[0299]
图24的<a>在产生服务需求时,使装备供电子模式迁移至“电动服务”来开始电动模式。并且,接通与请求服务对应的电源。
[0300]
图24的<b>当在集成管理器的电力管理器的协调中允许了高压利用的情况下,指示汲取来使igb启动。
[0301]
图24的<c>并且,在能够ac充电时,当在集成管理器的电力管理器的协调中允许了基于ac的电力供给的情况下,使充电子模式迁移至“ac充电”,通过充电指令的输出来并行执行ac充电。
[0302]
事例12
[0303]
图25中示出紧急用发电控制流程的例子(事例12)。
[0304]
图25的<a>接受基于用户操作涉及的发电请求,使ac供电子模式迁移至“外部v2l”以及“室内v2l”中的任一个。而且,使主模式从“休止”向“(紧急用)发电”迁移。
[0305]
图25的<b>在输出处理部中,输出igp信号,使动力总成系统启动。同时,输出ac供电指令。此外,在外部供电的情况下,还输出用于使充电系统启动的igb信号、用于继电器切换的外部输出指令。
[0306]
图25的<c>接受来自上位的供电以及输出指令,在动力总成域中实现请求。
[0307]
图25的<d>在没有用户操作下的请求撤回的情况下,若达到供给极限,则也使服务结束。
[0308]
效果等
[0309]
如以上那样,本公开的一个实施方式所涉及的信息处理装置在能够实现活动的控制架构中预先具备各种指令作为库,该各种指令仅通过调用预先决定的抽象的指令就能够自动地决定复合的促动器动作协调、用于启动所需的系统的电源启动、对于能量需求的能量供给协调(可否判断、供给源选择)、决定车辆整体的举动的模式迁移。
[0310]
由此,应用开发者对于目的能够容易地开发基于直观的算法设计的新的或者追加的应用(服务)而不必了解车辆的电子平台结构、规定指令、系统构成(硬件变更)以及能量体系等。
[0311]
另外,本实施方式所涉及的信息处理装置仅通过共享入口信息的参照以及指令库的活用,并单个安装新的或者追加的应用就能够进行功能追加,而不需要相关的应用的修正。
[0312]
另外,应用开发者能够容易地开发新的或者追加的应用。
[0313]
另外,本实施方式所涉及的信息处理装置能够通过层级构造化的各输入输出接口(i/f)的范畴中的举动来避免因车辆的意外的举动引起的不良状况的产生的检查工时、控制干涉确认的检查工时等的增加。
[0314]
并且,由于本实施方式所涉及的信息处理装置能够通过使用了模式、状况的状态的迁移来集中管理车辆的控制状况,所以能够恰当地控制车辆整体以便多个不同的功能系统的各功能间的动作不存在冲突。
[0315]
以上,对本公开技术的一个实施方式进行了说明,但本公开不仅能够理解为信息处理装置,还能够理解为具备处理器与存储器的信息处理装置所执行的方法、该方法的程序、存储有该程序的计算机可读取的非暂时性记录介质、或搭载有信息处理装置的车辆等。
[0316]
本公开在被搭载于车辆等的信息处理装置中是有用的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。