1.本发明涉及一种控制风力涡轮机的方法。此外,本发明涉及一种用于风力涡轮机的控制器。
背景技术:
2.在控制风力涡轮机的技术领域中,通常已知使用液压蓄能器(accumulator)和泵来使叶片变桨(pitch)。液压蓄能器和泵被定尺寸,以在几乎所有操作条件下递送足够的油和压强。然而,可能存在其中由于损坏的硬件(诸如例如,损坏的蓄能器或损坏的泵)而导致该定尺寸接近极限或不足的情形。这可能会导致接近停机极限的液压压强,该液压压强是由涡轮机控制器持续监测的。停机极限可以在每个风力涡轮机中由如下压强水平来定义:在该压强水平下,风力涡轮机可以到达安全停止位置(其可以在紧急停止期间)和/或在该压强水平下,风力涡轮机可以具有足够的力和速度以在操作以及正常停止过程期间使至少一个叶片变桨。
3.当在当前的风力涡轮机中液压压强下降到停机水平以下时,风力涡轮机停机。尽管实现两个上面定义的目标的最小压强随着桨距角而变化,但当今是通过针对所有桨距角的单个阈值来监测停机水平。
4.在当今的风力涡轮机中,液压系统被优化,使得需要最小数量的蓄能器和泵以用于操作。对于转子升级项目,通常使用相同的液压设计,从而使得该设计向停机极限被推进更多。因此,结果可能是,在一些情况下,可能无法提供用于启动序列的足够压强。因此,为了保持高于停机极限的压强,在启动序列处较低的变桨进入(pitch-in)速度可能是必要的。这可能导致增加的启动时间,以及在启动序列期间针对停机的增加风险。
5.此外,在当今的风力涡轮机中,在损坏的液压泵的情况下,由于例如三个泵中只有两个可用的事实,因此压强可能不会一直保持在停机极限以上,而是可能下降到停机极限以下。因此,损坏的泵可能导致涡轮机停机。特别是在海上设施中,更换损坏的组件可能是成本和时间密集型的。特别是由于天气条件(例如,大风或大浪)。
6.因此,在当前的风力涡轮机中,由于常规的方法,风力涡轮机可能具有长的停机时间和较低的可用性。
7.因此,可能需要提供一种控制风力涡轮机的方法,使得可以确保风力涡轮机的低停机时间并且同时确保高可用性。
技术实现要素:
8.该需要可以通过根据独立权利要求的主题来满足。从属权利要求描述了本发明的有利实施例。
9.根据本发明的第一方面,提供了一种控制风力涡轮机的方法,其中最小所需液压压强表示风力涡轮机的至少一个蓄能器的液压压强,该至少一个蓄能器的液压压强是将与蓄能器相关联的风力涡轮机的至少一个叶片变桨至风力涡轮机的停止位置中所需要的,并
且其中桨距角表示风力涡轮机的该至少一个叶片的法线相对于来风方向的桨距角。该方法包括:取决于该桨距角来确定最小所需液压压强的最小需求函数;在该至少一个叶片的当前桨距角下检测该至少一个蓄能器中的当前液压压强;以及控制风力涡轮机使得当前液压压强在当前桨距角下高于最小所需液压压强。
10.所描述的方法基于使用控制风力涡轮机的主动方法的思想,在该主动方法中,可以减少由于液压装置上过于严格的设置或者由于损坏的液压泵和/或蓄能器所致的可用性损失。因此,可以提供对风力涡轮机的主动控制,从而产生增强的可用性时间。
11.这可以导致风力涡轮机的能量产生中的增加。因此,较低级别的能源成本是可能的。风电场内的增加的总功率产生、连同由于较高湍流水平所致的较低疲劳负荷可以导致降低的疲劳负荷,使得可以优化结构设计并且因此可以降低成本。
12.附加地,这可以导致如下可能性:可以淘汰(cost out)一个物理组件(例如,蓄能器或泵)。这可以导致例如两个泵而不是三个泵,或者两个液压蓄能器而不是三个液压蓄能器。因此,风力涡轮机设计可以在更接近停机极限的情况下实现。对组件(例如,液压蓄能器或液压泵)的任何淘汰都可以节省风力涡轮机的生产和维护成本。
13.通常,所产生的高于承诺可用性水平的能量通常在风力涡轮机消费者与风力涡轮机生产者之间分摊。低于承诺可用性水平的可用性损失由风力涡轮机制造商来支付。因此,高于承诺可用性水平的任何可用性可能是为风力涡轮机制造商而支付的。
14.风力涡轮机的停止位置可以表示该至少一个叶片的位置,在该位置处,风力涡轮机不能够从来风中提取出风能,这是因为该至少一个叶片被变桨至来风中。
15.风力涡轮机的该至少一个叶片的法线可以表示垂直于风力涡轮机的叶片的弦(chord)延伸的方向。弦被定义为将叶片的前缘和后缘互连的笔直线。
16.桨距角可以被定义为叶片的法线相对于来风场之间的角度。因此,0
°
的桨距角可以指示叶片被变桨至来风中,并且叶片处于操作位置中。换句话说,叶片处于活动位置或工作位置中。在操作位置中,风力涡轮机可以从风中提取能量。相应地,90
°
的桨距角可以指示叶片被变桨离开(pitch out)来风,并且叶片处于停止位置中。在停止位置中,风力涡轮机不能够从来风中提取出能量。因此,在停止位置中,风力涡轮机的叶片不转动或空闲(以低速旋转)。
17.来风方向可以表示平均来风方向,该平均来风方向可以被视为撞击风力涡轮机的来风场的主要方向。
18.最小所需液压压强可以基于该至少一个蓄能器中具有足够的油以到达风力涡轮机的安全停止位置或者具有足够的力以便以最小桨距调节速度使该至少一个叶片变桨的最大压强。最小所需液压压强可以被定义为表示(换句话说,遵循)两个压强中的最大值。
19.根据本发明的示例性实施例,该方法进一步包括:确定偏移最小需求函数,该偏移最小需求函数以预定正偏移量与最小需求函数偏移,并且表示取决于桨距角的偏移最小所需液压压强的函数;在该至少一个叶片的当前桨距角下检测该至少一个蓄能器中的当前液压压强;确定当前液压压强是否在当前桨距角下高于最小所需液压压强并且在当前桨距角下低于偏移最小所需液压压强,并且控制风力涡轮机使得当前液压压强在当前桨距角下高于偏移最小所需液压压强。
20.提供预定正偏移量可以提供如下可能性:在风力涡轮机的液压系统可以满足最小
需求函数的压强之前,使得控制器能够具有一定的缓冲。这可能导致风力涡轮机的停机,这是因为液压系统中可能不存在足够的液压压强。因此,风力涡轮机被关闭以等待,直到当前压强高于最小需求函数的压强为止。由预定正偏移量提供的缓冲可以提供如下可能性:避免不必要的停机,并且因此扩大风力涡轮机的可用性。
21.如果检测到的当前液压压强在当前桨距角下高于最小所需液压压强并且在当前桨距角下低于偏移最小所需液压压强,则可以检测到所谓的低压强情形。在检测到低压强情形之后,控制风力涡轮机使得当前液压压强在当前桨距角下高于偏移最小液压压强可以包括两个不同的动作。
22.根据本发明的示例性实施例的第一动作,该至少一个叶片可以从当前桨距角变桨至另一个桨距角,该另一个桨距角通常朝向该至少一个叶片的停止位置。在停止位置中,该至少一个叶片被变桨离开来风方向。因此,该至少一个叶片被变桨离开风。在变桨离开之后,控制器控制该至少一个叶片,使得桨距角不改变,直到当前桨距角下的当前压强再次高于偏移最小需求函数。此后,可以将风力涡轮机设置回到正常操作。
23.根据本发明的另外示例性实施例的第二动作,适配风力涡轮机的该至少一个叶片的桨距调节速度。例如,朝向操作位置(在0
°
桨距角下)的桨距调节速度被降低以防止停机,并且朝向停止位置的桨距调节速度可能不受影响。这可允许风力涡轮机的控制器在额定风速下使该至少一个叶片变桨离开来风,例如在其中阵风撞击该至少一个叶片的情况下。因此,可以防止转子超速和高组件负荷,这是因为该至少一个叶片的变桨离开可能会降低偏移最小所需液压压强。
24.根据另一个示例,朝向停止位置(在90
°
桨距角下)的桨距调节速度被降低,以使得液压系统能够增加当前液压压强。
25.根据本发明的示例性实施例,通过逐区段线性插值和/或逐区段指数插值来确定最小需求函数。
26.插值可以基于不同的场景,这些场景可以发生在风力涡轮机的该至少一个叶片处,并且被图示为该至少一个蓄能器中的所需液压压强,以使得该至少一个叶片能够从当前桨距角变桨至停止位置桨距角(90
°
)。
27.根据本发明的示例性实施例,最小需求函数与偏移最小需求函数之间的距离沿着桨距角是恒定的。
28.提供沿着桨距角恒定的距离可以提供如下可能性:在每个当前桨距角具有相似且足够的偏移缓冲,以用于使得控制器能够控制风力涡轮机,使得当前液压压强在当前桨距角下高于最小所需液压压强。同时,用于确定当前液压压强是否高于最小所需液压压强并且在当前桨距角下低于偏移最小所需液压压强所必要的时间可以保持短。
29.根据本发明的另一个示例性实施例,最小需求函数与偏移最小需求函数之间的距离可以是线/极限计算的,特别是以便拟合该系统。
30.根据本发明的另外实施例,该控制包括:适配风力涡轮机的至少一个叶片的桨距调节速度。
31.适配桨距调节速度可以提供如下可能性:桨距调节速度可以取决于剩余反应时间。因此,在一方面,如果还剩下足够的时间来做出反应,例如如果当前液压压强在当前桨距角下仍然与最小需求函数相比更接近于偏移最小需求函数,则桨距调节速度可以保持
低,使得液压系统可以被更慢地重新填充。另一方面,如果仅剩下短的时间来做出反应,例如如果当前液压压强在当前桨距角下与偏移最小需求函数相比更接近于最小需求函数,则桨距调节速度可以是高的,使得液压系统中的压强下降得更慢,并且使得液压系统具有足够的时间再次被重新填充。
32.根据另外示例性实施例,桨距调节速度的适配包括朝向风力涡轮机的至少一个叶片的停止位置来适配桨距调节速度和/或朝向风力涡轮机的该至少一个叶片的操作位置来适配桨距调节速度。
33.风力涡轮机的该至少一个叶片的停止位置可以是其中该至少一个叶片被变桨离开风的位置,例如其中当前桨距角可以是90
°
的位置。
34.风力涡轮机的该至少一个叶片的操作位置可以是其中该至少一个叶片被变桨至风中的位置,例如其中当前桨距角可以是0
°
的位置。
35.朝向停止位置或朝向操作位置来适配桨距调节速度可以提供单独地适配桨距调节速度的可能性,该桨距调节速度必须被适配以维持风力涡轮机的安全操作。因此,可以抑制控制器的非强制必要的控制动作。
36.朝向操作位置和朝向停止位置来适配桨距调节速度可以提供对风力涡轮机的液压系统中出现的压强损失做出快速反应的可能性。因此,可以确保风力涡轮机的可用性。
37.根据本发明的另外示例性实施例,桨距调节速度的适配定义了取决于当前液压压强的桨距调节速度。
38.定义了取决于当前液压压强的桨距调节速度可以提供如下可能性:如果当前液压压强接近最小需求函数,则桨距调节速度可以减慢,使得压强下降减小。因此,可以增加风力涡轮机的可用性。如果当前液压压强接近偏移最小需求函数,则可以维持桨距调节速度。因此,可以提供更快的变桨。
39.根据本发明的示例性实施例,取决于当前液压压强的桨距调节速度被线性地或指数地改变。
40.线性地改变桨距调节速度可以提供易于实现和控制的对桨距调节速度的适配。
41.指数地改变桨距调节速度可以提供对桨距调节速度的适配,该适配提供了单独适配的桨距调节速度。
42.根据示例性实施例,取决于当前液压压强的桨距调节速度被逐步改变。这可以提供以快速方式来适配桨距调节速度的可能性。
43.根据本发明的示例性实施例,朝向风力涡轮机的该至少一个叶片的操作位置,桨距调节速度取决于当前液压压强从偏移最小所需液压压强下的100%改变到最小所需液压压强下的0%。
44.将桨距调节速度朝向操作位置从偏移最小所需液压压强下的100%改变到最小所需压强下的0%可以确保:在桨距角被进一步适配之前,处于接近停机水平的当前液压压强下的液压系统可以被重新填充。因此,可以抑制风力涡轮机的停机,并且可以增加风力涡轮机的可用性。同时,当当前液压压强接近偏移最小所需压强时,可以尽可能快地适配桨距角。因此,可以快速到达该至少一个叶片的操作位置,并且可以增加风力涡轮机的能量产生。
45.换句话说,当朝向操作位置变桨时、并且当当前液压压强在当前桨距角下低于偏
移最小所需液压压强时,桨距调节速度可以从100%的标称桨距调节速度减小(例如,线性地减小)到0
°
。
46.根据本发明的示例性实施例,朝向风力涡轮机的该至少一个叶片的停止位置,桨距调节速度取决于当前液压压强从偏移最小所需液压压强下的50%改变到最小所需液压压强下的0%。
47.换句话说,当朝向停止位置变桨并且没有检测到危险情形(例如,转子速度接近超速极限)时,变桨调节速度可以从50%的标称变桨调节速度减小(例如,线性地减小)到0
°
。
48.将桨距调节速度朝向停止位置从偏移最小所需液压压强下的50%改变到最小所需压强下的0%可以确保:在桨距角被进一步适配之前,处于接近停机水平的当前液压压强下的液压系统可以被重新填充。因此,可以抑制风力涡轮机的停机,并且可以增加风力涡轮机的可用性。同时,当当前液压压强接近偏移最小所需压强时,可以适配桨距角,使得可以确保附加的能量产生。
49.根据本发明的另外方面,提供了一种用于风力涡轮机的控制器,其中最小所需液压压强表示风力涡轮机的至少一个蓄能器的液压压强,该至少一个蓄能器的液压压强是将与蓄能器相关联的风力涡轮机的至少一个叶片变桨至风力涡轮机的停止位置中所需要的,并且其中桨距角表示风力涡轮机的至少一个叶片的法线相对于来风方向的桨距角。该控制器包括(a)确定装置,用于确定最小需求函数,该最小需求函数取决于该桨距角来确定最小所需液压压强的最小压强值;(b)检测装置,用于在该至少一个叶片的当前桨距角下检测该至少一个蓄能器中的当前液压压强;以及(c)控制装置,用于控制风力涡轮机使得当前液压压强在当前桨距角下高于最小所需液压压强。
50.此外,所描述的控制器基于使用控制风力涡轮机的主动方法的思想,在该主动方法中,可以减少由于液压装置上过于严格的设置或者由于损坏的液压泵和/或蓄能器所致的可用性损失。因此,可以提供对风力涡轮机的主动控制,从而产生增强的可用性时间。
51.这可以导致风力涡轮机的能量产生中的增加。因此,较低级别的能源成本是可能的。风电场内的增加的总功率产生、连同由于较高湍流水平所致的较低疲劳负荷可以导致降低的疲劳负荷,使得可以优化结构设计并且因此可以降低成本。
52.附加地,这可以导致如下可能性:可以淘汰一个物理组件(例如,蓄能器或泵)。这可以导致例如两个泵而不是三个泵,或者两个液压蓄能器而不是三个液压蓄能器。因此,风力涡轮机设计可以在更接近停机极限的情况下实现。
53.在下文中,描述了本发明的一些示例性思想。
54.在其中风力涡轮机使用至少一个叶片传感器以用于单独的桨距控制(ipc)的情况下,可以向集合桨距角添加附加的分量,以减小倾斜负荷或偏航负荷。如果ipc持续达太长时间,风力涡轮机的液压系统可能被排空,并且风力涡轮机可能达到接近最小所需液压压强。因此,可以减小ipc幅度,以便防止涡轮机停机。因此,通过控制风力涡轮机使得当前液压压强高于根据本发明的实施例所确定的最小所需液压压强,在当前桨距角下,风力涡轮机可以具有增强的可用性。
55.此外,提供根据本发明的实施例的控制风力涡轮机的方法可以提供如下可能性:淘汰风力涡轮机中的至少两个液压泵中的仅用于启动、停机、阵风情况和/或冗余的一个液压泵(例如,直接驱动式风力涡轮机中的三个液压泵中的一个)。如果桨距调节速度可能太
快以至于液压系统无法跟随,则将调整桨距调节速度,而不是使风力涡轮机停机。因此,可以增加风力涡轮机的鲁棒性。因此,可以增加风力涡轮机的可用性。
56.此外,控制风力涡轮机的方法可以提供鲁棒的风力涡轮机配置的可能性,在该配置中,在启动情况期间,控制器对配置误差不太敏感,并且风力涡轮机的设计更接近其极限可以导致风力涡轮机的降低的成本。
57.必须注意的是,已经参考不同的主题描述了本发明的实施例。特别地,已经参考方法类型权利要求描述了一些实施例,而参考装置类型权利要求描述了其他实施例。然而,本领域技术人员将从以上和以下描述中了解到:除非另行指出,否则除了属于一种类型主题的特征的任何组合之外,与不同主题相关的特征之间的任何组合、特别是方法类型权利要求的特征和装置类型权利要求的特征之间的任何组合也被认为是在本文档的情况下所公开的。
58.根据下文将要描述的实施例的示例,本发明的上面定义的方面和另外方面是明显的,并且参考实施例的示例来解释。下文将参考实施例的示例更详细地描述本发明,但是本发明不限于此。
附图说明
59.图1示出了风力涡轮机的示意性截面,本发明的控制方法和控制器可以应用于该风力涡轮机来控制该风力涡轮机。
60.图2示出了说明根据本发明的实施例的风力涡轮机控制如何被操作的图解。
61.图3示出了说明根据本发明的实施例的风力涡轮机控制可以如何防止风力涡轮机停机的图解。
62.图4示出了说明根据本发明的另外实施例的风力涡轮机控制如何被操作的图解。
63.图5示出了说明根据本发明的实施例的桨距调节速度适配如何被操作的图解。
64.图6示出了说明根据本发明的另外实施例的桨距调节速度适配如何被操作的图解。
65.图7示出了说明根据本发明的另外实施例的风力涡轮机控制可以如何防止风力涡轮机停机的图解。
66.图8示出了说明根据本发明的另外实施例的风力涡轮机控制可以如何防止风力涡轮机停机的图解。
具体实施方式
67.附图中的图示是示意性的。要注意的是,在不同的图中,相似或相同的元件或特征被提供有相同的参考符号,或者被提供有仅在第一个数字内与对应参考符号不同的参考符号。为了避免不必要的重复,已经参考先前描述的实施例阐明的元件或特征在该描述的稍后位置处不会再次阐明。
68.图1示出了根据本发明的风力涡轮机1。风力涡轮机1包括安装在未描绘的地基上的塔架2。机舱3被布置在塔架2的顶部上。风力涡轮机1进一步包括具有至少一个叶片4的风力转子5(在图1的实施例中,风力转子包括三个叶片4,其中仅两个叶片4是可见的)。风力转子5可围绕旋转轴线y而旋转。叶片4关于旋转轴线y并且沿着相应的纵向轴线x基本上径向
地延伸。
69.风力涡轮机1包括发电机11,发电机11包括定子20和转子30。转子30可关于定子20围绕旋转轴线y而旋转。风力转子5要么直接地(例如,直接驱动)、要么借助于可旋转主轴9和/或通过齿轮箱(图1中未示出)与发电机11旋转地耦合。提供了示意性描绘的轴承组装件8,以便将主轴9和转子5保持就位。可旋转主轴9沿着旋转轴线y延伸。
70.风力转子5包括三个法兰15,用于将相应叶片4连接到风力转子5。变桨轴承被插入在每个叶片法兰15与相应叶片4之间。液压变桨致动回路与叶片4的变桨轴承相关联,以用于调节每个叶片的桨距角,即每个叶片围绕相应叶片纵向轴线x的角度位置。液压变桨致动回路可以同时调整所有转子叶片4上的所有桨距角,和/或对转子叶片4的单独变桨可能是可用的。
71.风力涡轮机1包括具有处理器和存储器的控制器(未示出)。处理器基于存储在存储器中的指令来执行计算任务。根据这种任务,操作中的风力涡轮机生成所请求的功率输出水平。附加地,操作中的风力涡轮机避免了紧急停机,并且将当前液压压强维持在最小所需液压压强之上、特别是在偏移最小液压压强之上。
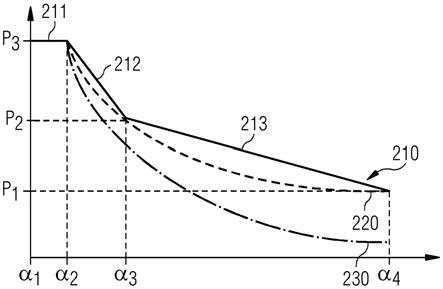
72.图2示出了最小需求函数210,该最小需求函数210可以由用于控制风力涡轮机1的控制器来生成。所有函数被说明为取决于桨距角α的压强p函数。虚线图示了基于模拟叶片力的第一压强函数220,风力涡轮机1的液压系统需要克服该模拟叶片力从而能够以最小速度使至少一个叶片4变桨。点划线示出了第二压强函数230,风力涡轮机1的液压系统需要该第二压强函数230以使得能够到达安全停止位置。根据图2中所示的实施例,第二压强函数230表示比第一压强函数220更低的压强值,这是因为在到达安全停止位置的情形中,安全蓄能器可以有帮助以使得所需要的压强更低。根据图2中所示的本实施例,最小需求函数210由第一压强函数220的逐区段线性插值来确定。
73.最小需求函数210包括第一区段211,该第一区段211在从第一桨距角α1延伸到第二桨距角α2的桨距角范围内恒定在第三压强p3下。第一桨距角α1为0
°
并且表示至少一个叶片4的操作位置。在操作位置中,至少一个叶片4的弦的法线和来风方向围成0
°
的桨距角α1。最小需求函数210进一步包括第二区段212和第三区段213,其中第二区段212在第一区段211与第三区段213之间延伸。第二区段212由从第二桨距角α2处的第三压强p3延伸到第三桨距角α3处的第二压强p2的线性插值来确定,其中第二压强p2低于第三压强p3,并且第二桨距角α2小于第三桨距角α3,在示例性实施例中,第三桨距角α3等于20
°
。第三区段213由从第三桨距角α3处的第二压强p2延伸到第四桨距角α4处的第一压强p1的线性插值来确定,其中第一压强p1低于第二压强p2,并且第三桨距角α3小于第四桨距角α4,在示例性实施例中,第四桨距角α
4 = 90
°
。在第四桨距角α4等于90
°
时,至少一个叶片4处于停止位置中。在第四桨距角α4等于90
°
的停止位置中,至少一个叶片4的法线和来风方向围成90
°
的第四桨距角4。换句话说,至少一个叶片4被转到风中,并且风力涡轮机1的至少一个叶片4停止旋转。
74.从图2中可以看出,最小需求函数210总是至少在风力涡轮机1的第一压强函数220上或其上方。
75.图3示出了如上面结合图2所描述的最小需求函数210、以及风力涡轮机1的液压函数340,该液压函数340表示取决于风力涡轮机的桨距角α的至少一个蓄能器中所需的液压压强p。
76.最小需求函数210是通过上面结合图2所描述的逐区段线性插值来确定的。如图3中所图示的液压函数340图示了取决于风力涡轮机1的桨距角α的液压压强p。当阵风撞击风力涡轮机1时,可能需要来自风力涡轮机1的控制器的大量变桨活动。
77.在第一系统状态341处,阵风撞击风力涡轮机。阵风撞击风力涡轮机1时的实际压强是桨距角α7下的p7。由于阵风,至少一个叶片4变桨离开,并且液压压强从压强p7下降到低于压强p7的压强p5。同时,由于该变桨离开,第二系统状态342处的桨距角α5大于桨距角α7。由于检测到较低的压强p5,风力涡轮机1的至少一个泵激活并且开始将液压压强添加到至少一个蓄能器中。这在图3中在第三系统状态343中图示。在风力涡轮机1的反应——该反应要花费时间——期间,在桨距角α8下的第三系统状态343处的压强p8低于在第二系统状态342处的压强p5。同时,该变桨离开从第二系统状态342继续到第三系统状态343。
78.当阵风已经过去和/或足够的压强被添加到风力涡轮机1的液压蓄能器时,压强从第三系统状态343处的压强p8再次增加到第四系统状态344处的压强p9。由于风力涡轮机1的反应时间,第四系统状态344处的桨距角α9大于第三系统状态343处的桨距角α8。此后,压强进一步增加,从而达到第五系统状态345处的压强p6。附加地,风力涡轮机1的至少一个叶片4再次变桨进入。因此,至少一个叶片4的桨距角α6小于第四系统状态344处的桨距角α9。
79.第一系统状态341、第二系统状态342、第三系统状态343、第四系统状态344和第五系统状态345的所有液压压强值都高于最小需求函数210,使得可以防止由于风力涡轮机1的过低可用液压压强所致的停机。
80.图4示出了偏移最小需求函数410,该偏移最小需求函数410可以由用于控制风力涡轮机1的控制器来生成。
81.在如上面结合图2所描述的那样由控制器生成了最小需求函数210之后,通过恒定的并且具有例如10bar的值的预定正偏移量420来确定偏移最小需求函数410。最小需求函数210可以是风力涡轮机在其处停机的停机水平。偏移最小函数可以被定义为与最小需求函数210的预定正偏移量420。
82.最小需求函数210是逐区段线性的,并且相应地,偏移最小需求函数410是逐区段线性的。附加地,预定正偏移量420是恒定的,并且因此最小需求函数210与偏移最小需求函数410之间的距离沿着桨距角α是恒定的。
83.如图4中所图示,在第一桨距角α1下,最小需求函数包括第一压强p1,并且偏移最小需求函数410包括第二压强p2,该第二压强p2以预定正偏移量420与最小需求函数210偏移。对于第二桨距角α2也是如此,在第二桨距角α2下,最小需求函数210包括低于第一压强p1和第二压强p2的第三压强p3,并且偏移最小需求函数410包括第四压强p4,该第四压强p4以预定正偏移量420与最小需求函数210偏移。第一桨距角α1和第二桨距角α2下的预定正偏移量420是相同的。
84.图5示出了如上面结合图4所描述的最小需求函数210和偏移最小需求函数410。附加地,在图5中描绘了朝向停止位置530的桨距调节速度和朝向操作位置560的桨距调节速度。
85.朝向停止位置530的桨距调节速度不取决于液压压强而改变,并且被设置为100%。朝向操作位置560的桨距调节速度以线性方式从作为偏移最小所需液压压强的第二压强p2下的100%改变/缩放到作为最小所需压强的第一压强p1下的0%。
86.图6示出了如上面结合图4所描述的最小需求函数210和偏移最小需求函数410。附加地,在图6中描绘了朝向停止位置630的桨距调节速度和朝向操作位置560的桨距调节速度。
87.朝向操作位置560的桨距调节速度以线性方式从作为偏移最小所需液压压强的第二压强p2下的100%改变/缩放到作为最小所需压强的第一压强p1下的0%。附加地,只要操作条件被认为是安全的,朝向停止位置630的桨距调节速度可以被减小到标称桨距调节速度的50%。因此,朝向停止位置630的桨距调节速度表示变桨离开速度,并且以线性方式从作为偏移最小所需液压压强的第二压强p2处的100%改变/缩放到作为最小所需压强的第一压强p1处的50%。因此,在其中转子接近超速极限的情况下,可以去除对桨距调节速度的限制。
88.图7示出了如上面结合图2所描述的最小需求函数210、如上面结合图4所描述的偏移最小需求函数410、以及风力涡轮机1的液压函数740,液压函数740表示取决于风力涡轮机1的桨距角α的至少一个蓄能器中所需的液压压强。
89.在启动情况下,风力涡轮机1在由86
°
的第一桨距角α1和包括标称压强的第一压强p1所定义的第一系统状态741处启动。在随后的步骤中,至少一个叶片4变桨进入,直到可以达到第二系统状态742。第二系统状态742由第二压强p2和例如60
°
的第二桨距角α2来定义,第二压强p2包括比第一压强p1更低的压强。在第二系统状态742处,变桨停止,并且液压压强通过至少一个液压泵被添加到至少一个蓄能器,直到达到第三系统状态743,该第三系统状态743由第二桨距角α2和第一压强p1来定义。仅当达到第三系统状态743时,至少一个叶片4将继续朝向操作位置变桨进入。
90.在例如损坏的泵的情况下、或者在液压系统(要么是至少一个蓄能器、要么是至少一个液压泵)略微尺寸不足的情况下,该至少一个液压泵可能不会将压强保持在由偏移最小需求函数410所定义的偏移最小所需压强以上。因此,到达了由第四压强p4和第四桨距角α4所定义的第四系统状态744,第四压强p4等于第四桨距角α4下的偏移最小所需压强。在接下来的步骤中,控制器控制风力涡轮机1,使得桨距调节速度减慢,使得当前液压压强保持在由最小需求函数210所定义的最小所需液压压强以上。因此,到达了由第五压强p5和第五桨距角α5所定义的第五系统状态745。第五压强p5低于偏移最小需求函数410并且高于最小需求函数210。因此,风力涡轮机1继续操作并且不停机。
91.随后,桨距调节速度遵循风力涡轮机1中存在的最大液压泵容量,并且进一步朝向产生位置(production position)变桨进入。这由图7中的第六系统状态746来表示,该第六系统状态746由第六压强p6和第六桨距角α6来定义,第六压强p6高于第五压强p5并且仍低于第六桨距角α6下的偏移最小所需压强。在操作位置处,到达了由第七压强p7和第七桨距角α7所定义的第七系统状态747,第七压强p7高于第六压强p6以及高于偏移最小需求函数410,第七桨距角α7等于产生位置处的标称桨距角(例如,1
°
)。
92.图8示出了如上面结合图2所描述的最小需求函数210、如上面结合图4所描述的偏移最小需求函数410、以及风力涡轮机1的液压函数840,液压函数840表示取决于风力涡轮机的桨距角α的至少一个蓄能器中所需的液压压强。
93.在损坏的液压泵的情况下,风力涡轮机1可以在跛行(limping)模式中产生功率,以确保可用性高于完全停机下的可用性。类似地,在严重阵风——其中至少一个叶片4需要比风力涡轮机1的设计中所计及的变桨离开更多的变桨离开——的情况下,可以抑制停机。
94.在第一系统状态841中,风力涡轮机1在正常操作中以第一压强p1和第一桨距角α1在操作位置中操作。随后,当严重阵风撞击正常操作中的至少一个叶片4或者小阵风撞击跛行模式中的至少一个叶片4时,至少一个叶片4变桨离开,并且风力涡轮机1达到由第二压强p2和第二桨距角α2所定义的第二系统状态842。第二压强p2小于由偏移最小需求函数410所定义的偏移最小所需液压压强,并且大于由最小需求函数210所定义的最小所需液压压强。朝向停止位置的桨距调节速度不受影响,并且该压强在至少一个叶片4的变桨离开活动期间继续下降。因此,到达了由第三压强p3和第三桨距角α3所定义的第三系统状态843,第三压强p3小于第二压强p2、小于偏移最小所需液压压强但是仍大于最小所需液压压强,第三桨距角α3大于第二桨距角α2。
95.随后,朝向操作位置的桨距调节速度减小,使得该至少一个液压泵可以再次被填充有液压压强。到达了由第四压强p4和第四桨距角α4所定义的第四系统状态844。第四压强p4大于由偏移最小需求函数410所定义的偏移最小所需液压压强,并且第四桨距角α4小于第三桨距角α3并且大于第二桨距角α2。该至少一个液压泵继续被填充有液压压强,使得达到由第五压强p5和例如1
°
的第五桨距角α5所定义的第五系统状态845。
96.应当注意的是,术语“包括”不排除其他元件或步骤,并且冠词“一(a或an)”的使用不排除多个。结合不同实施例描述的元件也可以被组合。还应当注意的是,权利要求中的参考符号不应当被解释为限制权利要求的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
