1.本发明涉及判定运输车相对于工程机械的位置的运输车位置判定装置。
背景技术:
2.例如在专利文献1等中记载了判定运输车相对于工程机械的位置的技术。在该文献所记载的技术中,对运输车的载台的前侧面(立设片)与铲斗外侧面之间的距离(该文献的图3中的“l2”)进行测量(参照该文献的第[0018]段)。根据所测量的距离与运输车及工程机械的既知的尺寸,计算从工程机械的下部行走体至运输车的距离(该文献的图3中的“l5”)(参照该文献的第[0019]段)。而且,将从下部行走体至运输车的距离与作为目标的距离(该文献的图3中的“l1”)进行比较(参照该文献的第[0020]段)。
[0003]
在该文献所记载的技术中,从运输车的后端至前侧面的长度(该文献的图3中的“l4”)必须是既知。然而,该长度基于运输车的不同而不同。因此,若运输车的种类被变更,便无法判定运输车相对于工程机械的位置。
[0004]
现有技术文献专利文献专利文献1:日本专利公开公报特开平6-19547号。
技术实现要素:
[0005]
本发明的目的在于提供一种即使运输车的种类被变更也能够判定运输车相对于工程机械的位置的运输车位置判定装置。
[0006]
运输车位置判定装置用于工程机械,该工程机械具有进行将装载对象物装载到运输车的载台的搬运及卸放的附属设备。运输车位置判定装置包括:距离图像获取部和运算部。距离图像获取部获取所述载台的距离图像。所述运算部根据所述距离图像获取部获取的所述载台的所述距离图像,设定关于所述载台的位置的范围亦即载台范围。所述运算部获取卸放范围。所述卸放范围是关于所述附属设备能够卸放所述装载对象物的区域的范围。所述运算部判定所述载台范围的至少局部是否落入在所述卸放范围。
附图说明
[0007]
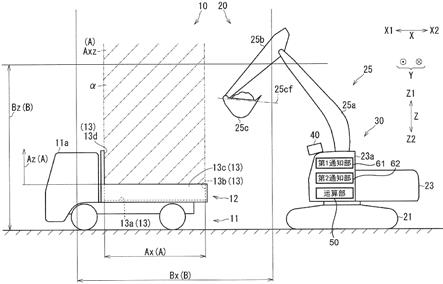
图1是从横侧观察采用了运输车位置判定装置30的运输车10及工程机械20时的图。
[0008]
图2是从横侧观察图1所示的工程机械20时的图,且是表示卸放范围b等的图。
[0009]
图3是从上方观察图1所示的运输车10及工程机械20时的图。
具体实施方式
[0010]
参照图1至图3来说明图1所示的运输车位置判定装置30及采用了该运输车位置判定装置30的运输车10及工程机械20。
[0011]
运输车10是具有载台12的车辆。运输车10是用于运送被工程机械20装载的物体(装载对象物)的车辆,其可以是翻斗车,也可以是卡车。运输车10具备主体部11和载台12。主体部11能够走行,并且支撑载台12。主体部11具备驾驶室11a。
[0012]
载台12收容装载对象物。收容于载台12的装载对象物例如可以是砂土,也可以是废弃物。载台12相对于驾驶室11a被配置在运输车10的后侧。以下,将从驾驶室11a往载台12的一侧称作“运输车后侧”,将从载台12往驾驶室11a的一侧称作“运输车前侧”。载台12可以相对于主体部11而可动,也可以固定于主体部11。载台12具备平面部13。
[0013]
平面部13是载台12中呈平面状或呈大致平面状的部分。平面部13具备地板面13a、后侧面13b、侧面13c、前侧面13d。各平面部13(地板面13a等)只要是整体呈平面状或呈大致平面状便可。各平面部13可以具有凹凸,也可以具有平缓的曲面。地板面13a是载台12的底面。后侧面13b是载台12的运输车后侧的面,其从地板面13a的运输车后侧的部分向上突出。侧面13c是载台12的左右的面(参照图3),其从地板面13a的左右的端部向上突出。前侧面13d是载台12的运输车前侧的面,其从地板面13a的运输车前侧的部分向上突出。前侧面13d比侧面13c更向上突出,也比后侧面13b更向上突出。
[0014]
工程机械20是进行将装载对象物装载到载台12的作业(装载作业)的机械。工程机械20例如可以能够铲取装载对象物,也可以能够通过夹持来抓取装载对象物。工程机械20例如是进行建筑作业的工程机械,例如是挖掘机等。以下,对工程机械20为挖掘机的情形进行说明。工程机械20具备下部行走体21、上部回转体23、附属设备25。
[0015]
下部行走体21使工程机械20行走。下部行走体21例如具备履带。上部回转体23可回转地被搭载于下部行走体21。上部回转体23具备驾驶舱23a。驾驶舱23a是用于让工程机械20的操作人员进行操作的部分。此外,工程机械20也可以不被驾驶舱23a内的操作人员操作,也可以由工程机械20的外部的操作人员操作(远程操作),也可以由计算机自动操作。
[0016]
(关于工程机械20的方向)上部回转体23的相对于下部行走体21回转的转轴的延伸方向被假定为上下方向z。在上下方向z中,从下部行走体21往上部回转体23的一侧(朝向)被假定为上侧z1,其相反侧被假定为下侧z2。与上下方向z正交的方向也就是附属设备25相对于上部回转体23突出的一侧被假定为前后方向x的前侧x1,其相反侧被假定为前后方向x的后侧x2。与上下方向z及前后方向x分别正交的方向被假定为横向y。
[0017]
附属设备25是进行装载对象物的搬运(移动)及卸放(例如卸土等)的作业装置。附属设备25具备动臂25a、斗杆25b、远端附属设备25c。动臂25a可起伏(可上下摆动)地被安装于上部回转体23。斗杆25b可摆动(可推拉)地被安装于动臂25a。远端附属设备25c设置于附属设备25的远端部,可摆动地被安装于斗杆25b。远端附属设备25c可以是铲取装载对象物(例如砂土)的铲斗,也可以是通过夹持来抓取装载对象物的装置(抓斗等)。
18.运输车位置判定装置30进行关于运输车10相对于工程机械20的位置的判定。运输车位置判定装置30判定运输车10是否被配置在装载对象物能够从工程机械20被装载到运输车10的位置等。运输车位置判定装置30具备距离图像获取部40、运算部50、第1通知部61、第2通知部62。
[0019]
距离图像获取部40获取载台12的距离图像(包含载台12的距离图像)。距离图像是包含距离的信息(深度的信息)的图像,是三维的信息。距离图像获取部40测量从距离图像
获取部40至载台12的各个部(详细后述)的距离。具体而言,例如距离图像获取部40可以具备lidar(light detection and ranging(光检测和测距)或laser imaging detection and ranging(激光成像检测和测距)),也可以具备立体相机,也可以具备tof(time of flight(飞行时间))传感器。
[0020]
该距离图像获取部40被设置于工程机械20。距离图像获取部40被配置在成为能够获取载台12及载台12的周边部的距离图像的位置。距离图像获取部40例如可以被配置(设置)在驾驶舱23a的内部,也可以被配置在驾驶舱23a的外部,在图1所示的例子中,其被配置在驾驶舱23a的上侧面。此外,距离图像获取部40也可以被配置在与工程机械20不同的位置(离开工程机械20的位置)。运算部50、第1通知部61、以及第2通知部62也可以被配置离开工程机械20的位置。
[0021]
运算部50进行信号的输入输出、判定及计算等的运算、信息的存储等。运算部50对距离图像获取部40所获取的载台12的距离图像进行处理,计算载台12的三维信息。运算部50例如由控制器构成。
[0022]
第1通知部61在运算部50的控制下对人员进行通知。第1通知部61输出声音、光及振动其中至少一者的通知(详细后述)。第2通知部62也与第1通知部61同样地对人员进行通知。第2通知部62与第1通知部61可以是兼用也可以是分体。
[0023]
(动作)工程机械20以如下述那样动作的方式而被构成。
[0024]
(载台12的信息的计算)运算部50根据距离图像获取部40所获取的距离图像,计算载台12的三维信息(以下称作“载台信息”)。载台信息包含表示载台12相对于工程机械20的三维位置的位置信息。载台信息有可以包含表示载台12的三维形状的形状信息。载台信息可以包含载台12的整体的位置信息及形状信息,也可以包含载台12的局部的位置信息及形状信息。例如,载台信息可以包含载台12中仅在后述的载台范围a的计算中所需要的部分的信息。
[0025]
运算部50也可以根据表示包含载台12的二维信息的二维图像和载台12的距离图像,计算载台信息。例如,载台信息可以如下述那样被计算出。距离图像获取部40还获取包含载台12的距离图像及包含载台12的二维图像。此情况下,距离图像获取部40还具备获取二维图像的摄像机等图像传感器。其次,运算部50通过利用从图像提取特定的形状的程序,来提取(计算及推定)二维图像中的载台12的位置。其次,运算部50根据二维图像中的载台12的位置,从包含载台12及载台12周围的物体的距离图像提取载台12的距离图像。此处,运算部50也可以仅针对在后述的载台范围a的计算中所需要的部分来从二维图像及距离图像进行提取。而且,运算部50根据所提取的载台12的距离图像,计算载台信息。此外,运算部50如果能够不利用二维图像地计算出三维的载台信息,也可以不利用二维图像来计算载台信息。
[0026]
(载台范围a、卸放范围b、以及恰当卸放范围c的概要)运算部50设定(算出)关于载台12的位置的范围亦即载台范围a。运算部50获取关于从附属设备25能够卸放装载对象物的区域(卸放区域β(参照图2))的范围亦即卸放范围b。较为理想的是,运算部50获取根据附属设备25的作业效率而被决定的恰当卸放范围c(参照图3)。而且,运算部50进行“运输车位置判定”。具体而言,运算部50在运输车位置判定中
判定载台范围a的至少局部是否落入在卸放范围b。运算部50也可以在运输车位置判定中判定载台范围a的至少局部是否落入在恰当卸放范围c(参照图3)。
[0027]
运算部50可以根据前后方向x的信息或者也可以根据前后方向x及上下方向z的信息来进行运输车位置判定。运算部50可以如图3所示那样根据前后方向x及横向y的信息(从上下方向z观察到的范围的信息,亦即俯视下的范围的信息)来进行运输车位置判定。运算部50也可以根据前后方向x、横向y及上下方向z的信息(三维信息)来进行运输车位置判定。
[0028]
(载台范围a的设定)运算部50根据距离图像获取部40所获取的距离图像,设定载台范围a。载台范围a是关于载台12的位置的范围。此处,载台12的正上方的区域被假定为载台区域α(参照图1及图3)。载台区域α是假设性地使载台12向上侧z1平行地移动时的由载台12的轨迹所划定的呈柱状的三维区域。此外,运算部50可以计算或者也可以不计算载台区域α。载台范围a的详细如下。
[0029]
(关于前后方向x的载台范围ax的设定)在根据前后方向x的信息来进行运输车位置判定的情况下,运算部50例如如下述那样设定关于前后方向x的载台范围a亦即载台范围ax。
[0030]
载台范围ax是从载台区域α的前侧x1的末端(或大致末端)至载台区域α的后侧x2的末端(或大致末端)的范围。更详细而言,载台范围ax的前侧x1的末端(边界)的位置是上部回转体23朝向载台12时平面部13(载台12的面)中距离工程机械20最远的面(具体而言为前侧面13d)的位置。上述的“上部回转体23朝向载台12时”意味着载台12被配置在上部回转体23的前侧x1的正面之时(以下同样)。例如,“上部回转体23朝向载台12时”意味着前后方向x与任一平面部13正交。此外,载台范围ax的前侧x1的末端的位置可以是基于前侧面13d的位置的位置而且是与前侧面13d的位置不同的位置(例如前侧面13d的近傍、载台12内部侧的位置等)(关于以下的载台范围a与载台12的关系也同样)。载台范围ax的后侧x2的末端的位置是上部回转体23朝向载台12时平面部13中距离工程机械20最近的面(具体而言为后侧面13b)的位置。
[0031]
此外,在前侧面13d相对于前后方向x不正交的情况(倾斜的情况)下,载台范围ax的前侧x1的末端可以是前侧面13d中最靠后侧x2的位置。在后侧面13b相对于前后方向x不正交的情况下,载台范围ax的后侧x2的末端可以是后侧面13b中最靠前侧x1的位置。
[0032]
(关于上下方向z的载台范围az的设定)在根据上下方向z的信息进行运输车位置判定的情况下,运算部50例如如下述那样设定关于上下方向z的载台范围a亦即载台范围az。载台范围az是相对于载台区域α的下侧z2的末端而位于上侧z1的范围。更详细而言,载台范围az的下侧z2的末端的位置是包含在载台12的特定部位的位置。具体而言,载台范围az的下侧z2的末端的位置可以是侧面13c及后侧面13b的上侧z1的端部的位置,也可以是地板面13a的位置,也可以是前侧面13d的上侧z1的端部的位置。载台范围az的上侧z1的末端的位置也可以不被设定,也可以被设定在例如距载台12指定的高度的位置等。
[0033]
(关于前后方向x及上下方向z的载台范围axz的设定)在根据前后方向x及上下方向z的信息进行运输车位置判定的情况下,运算部50例如如下述那样设定关于前后方向x及上下方向z的载台范围a亦即载台范围axz。载台范围
axz是与从横向y观察到的载台区域α相同(或大致相同)的范围,是由载台范围ax和载台范围az所划定的平面状范围。
[0034]
(关于前后方向x及横向y的载台范围axy的设定)如图3所示,在根据前后方向x及横向y的信息进行运输车位置判定的情况下,运算部50例如如下述那样设定关于前后方向x及横向y的载台范围a亦即载台范围axy。载台范围axy是与从上下方向z观察到的(俯视下的)载台区域α相同(或大致相同)的范围。更详细而言,载台范围axy是从上下方向z观察时能够收容装载对象物的载台12的内部的范围。具体而言,载台范围axy是被后侧面13b、左右的侧面13c及前侧面13d包围的范围。载台范围axy是从上下方向z观察时与地板面13a重叠的区域。
[0035]
(关于三维信息的载台范围a的设定)也可以根据前后方向x、横向y及上下方向z的信息(三维信息)进行运输车位置判定。此情况下,三维信息的载台范围a与载台区域α相同。
[0036]
(卸放范围b的获取)运算部50获取图2所示的卸放范围b。卸放范围b是关于能够从远端附属设备25c卸放装载对象物的区域(下述的卸放区域β)的范围。运算部50可以预先将卸放范围b存储于存储器,也可以计算卸放范围b。
[0037]
将在下部行走体21不行走而附属设备25动作时能够从远端附属设备25c卸放装载对象物的区域假定为卸放区域β。卸放区域β为呈大致环形的立体形状(参照图2及图3)。上述的“附属设备25动作”例如是下述的[例1a]至[例1d]中的至少任一动作。[例1a]:动臂25a相对于上部回转体23摆动。[例1b]:斗杆25b相对于动臂25a摆动。[例1c]:远端附属设备25c相对于斗杆25b摆动。[例1d]:基于上部回转体23相对于下部行走体21回转而附属设备25相对于下部行走体21转动(回转)。
[0038]
卸放区域β根据附属设备25的信息而被决定。具体而言,卸放区域β根据附属设备25的各组成部分(动臂25a等)的尺寸、以及附属设备25的各组成部分能够取得的角度范围(例如动臂25a相对于上部回转体23的起伏角度的范围)的信息而被决定。此外,运算部50可以计算或者也可以不计算卸放区域β。
[0039]
即使是远端附属设备25c能够配置的位置,若该位置是未被预计到从远端附属设备25c卸放装载对象物的位置,其也可以不包含在卸放区域β中。具体而言,例如相对于下部行走体21的下侧z2的末端而位于下侧z2的位置可以不包含或者包含在卸放区域β中。此外,相对于下部行走体21的前侧x1的端部而位于后侧x2的区域由于不可能(或难以)配置载台12(参照图1),因此,其也可以不包含在卸放区域β中。
[0040]
如图2所示,在远端附属设备25c为铲斗的情况下,基于远端附属设备25c相对于斗杆25b摆动,装载对象物便从远端附属设备25c被卸放。因此,远端附属设备25c卸放装载对象物时的远端附属设备25c的轨迹的区域也可以不包含在卸放区域β中。在远端附属设备25c为通过夹持装载对象物来进行抓取的装置的情况下,在卸放装载对象物时,远端附属设备25c不需要相对于斗杆25b摆动。此情况下,卸放区域β可以包含在远端附属设备25c的远端部的可动区域β0的范围内(或大致范围内)。
[0041]
(关于前后方向x的卸放范围bx的获取)在根据前后方向x的信息进行运输车位置判定的情况下,运算部50获取关于前后
方向x的卸放范围b亦即卸放范围bx。例如,卸放范围bx的前侧x1的末端(边界)的位置是卸放区域β的前侧x1的末端的位置。即,卸放范围bx的前侧x1的末端的位置是在下部行走体21不行走而附属设备25动作时能够从远端附属设备25c卸放装载对象物的区域中最靠前侧x1的位置。此外,卸放范围bx的前侧x1的末端的位置可以是基于卸放区域β的前侧x1的末端的位置的位置而且是与卸放区域β的前侧x1的末端的位置不同的位置(关于以下的卸放范围b与卸放区域β的关系也同样)。卸放范围bx的后侧x2的末端的位置是卸放区域β的后侧x2的末端的位置。
[0042]
(关于上下方向z的卸放范围bz的获取)在根据上下方向z的信息进行运输车位置判定的情况下,运算部50获取关于上下方向z的卸放范围bz。例如,卸放范围bz的上侧z1的末端的位置是卸放区域β的上侧z1的末端的位置。卸放范围bz的下侧z2的末端的位置是卸放区域β的下侧z2的末端的位置。
[0043]
(关于前后方向x及上下方向z的卸放范围bxz的获取)在根据前后方向x及上下方向z的信息进行运输车位置判定的情况下,运算部50获取关于前后方向x及上下方向z的卸放范围bxz。卸放范围bxz是从横向y观察到的卸放区域β的范围。此外,卸放区域β具有使图2所示的卸放范围bxz以上部回转体23的转轴zd为中心转动1周而成的立体形状。因此,图2所示的卸放范围bxz仅表示了卸放范围bxz的局部。实际上,卸放范围bxz中,除了图2所示的卸放范围bxz之外还包含使图2所示的卸放范围bxz相对于转轴zd折返的范围。
[0044]
(关于前后方向x及横向y的卸放范围bxy的获取)如图3所示,在根据前后方向x及横向y的信息进行运输车位置判定的情况下,运算部50获取关于前后方向x及横向y的卸放范围bxy。卸放范围bxy是从上下方向z观察到的卸放区域β的范围。例如,卸放范围bxy是由以上部回转体23的转轴zd为中心的圆b1和以转轴zd为中心且半径比圆b1大的圆b1所包围的呈环状的范围。此外,图3所示的卸放范围bxy表示将图2所示的卸放区域β在上下方向z上的某一位置处与水平面平行地切断时的剖面。
[0045]
(关于三维信息的卸放范围b的获取)在根据前后方向x、横向y及上下方向z的信息(三维信息)进行运输车位置判定的情况下,运算部50获取三维信息的卸放范围b。三维信息的卸放范围b是与卸放区域β相同的范围。
[0046]
(恰当卸放范围c的获取)运算部50获取恰当卸放范围c。恰当卸放范围c是包含在卸放范围b且比卸放范围b窄的范围。恰当卸放范围c根据附属设备25进行的作业的效率(作业效率)而被决定。运算部50可以预先存储恰当卸放范围c,也可以计算恰当卸放范围c。具体而言,例如恰当卸放范围c如下述那样而被设定。
[0047]
恰当卸放范围c的前侧x1的末端(边界)可以被设定在相对于卸放范围b的前侧x1的末端而位于后侧x2。具体而言,从上下方向z观察时的恰当卸放范围c是由以转轴zd为中心的圆c1和以转轴zd为中心且半径比圆c1大的圆c2所包围的环状的范围。此处,圆c1的半径比圆b1的半径大,圆c2的半径比圆b2的半径小。其理由的例子如下。[例2a]:从上部回转体23的转轴zd至远端附属设备25c的前侧x1的末端的距离(作业半径)越小,则工程机械20越易于稳定,作业效率好。[例2b]:作业半径越小,则越能够加大上部回转体23相对于下部
行走体21的回转加速度,能够缩短作业时间,作业效率好。[例2c]:作业半径越小,则越能够降低在上部回转体23的回转上所必要的能量,作业效率好。[例2d]:与作业半径为最大值或大致最大值时相比,在作业半径较小时,附属设备25的姿势的自由度高,因此作业效率好。
[0048]
[例2e]:图3所示的恰当卸放范围c可以根据远端附属设备25c对装载对象物的搬运是否能够效率良好地被进行而被设定。其具体例如下。如图2所示,将通过铲斗亦即远端附属设备25c的基端部与远端部的面假定为面25cf。在作业半径大(最大值或大致最大值)时,斗杆25b的长边方向便成为水平方向或大致水平方向。此时,即使让用于使远端附属设备25c相对于斗杆25b摆动的工作缸(未图示)伸缩,远端附属设备25c的面25cf的延伸方向也不能成为水平方向(或大致水平方向)。因此,远端附属设备25c能够搬运的装载对象物的量受到限制。另一方面,与作业半径为最大值或大致最大值时相比,在作业半径较小时,远端附属设备25c的面25cf的延伸方向能成为水平方向。由此,远端附属设备25c能够搬运的装载对象物的量不受限制,作业效率好。
[0049]
如图3所示,恰当卸放范围c的后侧x2的末端(边界)可以被设定在相对于卸放范围b的后侧x2的末端而位于前侧x1。其理由的例子如下。[例3a]:在作业半径比最小值或大致最小值大时,不会发生远端附属设备25c与驾驶舱23a接触或防止远端附属设备25c与驾驶舱23a接触的功能动作的问题。因此,作业效率好。此外,在图2所示的例子中,远端附属设备25c不可能与驾驶舱23a接触,但是,基于附属设备25的尺寸或形状,有时远端附属设备25c会与驾驶舱23a接触。[例3b]:与作业半径为最小值或大致最小值时相比,在作业半径较大时,附属设备25的姿势的自由度更高,因此作业效率好。
[0050]
此外,在根据前后方向x的信息进行运输车位置判定的情况下,运算部50可以获取关于前后方向x的恰当卸放范围c(参照图3)(关于其它的方向也同样)。恰当卸放范围c可以设置多个阶段(恰当的范围、较恰当的范围、更恰当的范围等)。
[0051]
(运输车位置判定)运算部50判定图3所示的载台范围a的至少局部是否落入在卸放范围b。例如,在根据前后方向x的信息进行运输车位置判定的情况下,运算部50判定关于前后方向x的载台范围ax的至少局部是否落入在关于前后方向x的卸放范围bx。或者,在根据上下方向z的信息进行运输车位置判定的情况下,运算部50判定关于上下方向z的载台范围az的至少局部是否落入在关于上下方向z的卸放范围bz。或者,在根据前后方向x及上下方向z的信息进行运输车位置判定的情况下,运算部50判定关于前后方向x及上下方向z的载台范围axz的至少局部是否落入在关于前后方向x及上下方向z的卸放范围bxz。或者,在根据前后方向x及横向y的信息进行运输车位置判定的情况下,运算部50判定关于前后方向x及横向y的载台范围axy的至少局部是否落入在关于前后方向x及横向y的卸放范围bxy。或者,在根据前后方向x、横向y及上下方向z的信息进行运输车位置判定的情况下,运算部50判定关于前后方向x、横向y及上下方向z的载台范围a的至少局部是否落入在关于前后方向x、横向y及上下方向z的卸放范围b。
[0052]
此外,运算部50判定载台范围a的至少局部是否落入在恰当卸放范围c。运算部50可以判定载台范围a的整体是否落入在卸放范围b。运算部50可以判定载台范围a的整体是否落入在恰当卸放范围c。
[0053]
(根据判定结果的输出)
运算部50根据判定结果输出信号。运算部50输出的信号能够有各种用途。例如,运算部50输出的信号可以用于某些控制,也可以用于下述的通知,也可以包含数值等信息。
[0054]
(通知)在图1所示的载台范围a的至少局部落入在卸放范围b的情况下,运算部50通过输出使通知进行的信号来使第1通知部61进行通知。在载台范围a未落入在卸放范围b的情况下,运算部50不使第1通知部61进行通知。第1通知部61对运输车10被配置在能够进行装载作业的位置的情况进行通知。第1通知部61例如对运输车10的司机输出通知(信号)。第1通知部61进行的通知如上所述可以是声音、光及振动中的至少任一者。具体而言,第1通知部61可以是运输车10和工程机械20中的至少任一者的声音输出部(喇叭、扬声器等)。第1通知部61可以是运输车10和工程机械20中的至少任一者的光学输出部(画面、照明等),也可以是与运输车10的司机接触的振动发生装置。
[0055]
在载台范围a的至少局部落入在恰当卸放范围c(参照图3)的情况下,运算部50使第2通知部62进行通知。在载台范围a未落入在恰当卸放范围c(参照图3)的情况下,运算部50不使第2通知部62进行通知。第2通知部62对运输车10被配置在能够恰当地进行装载作业的位置的情况进行通知。第2通知部62例如对运输车10的司机输出通知(信号)。第2通知部62进行的通知的具体例与第1通知部61进行的通知的具体例同样。第2通知部62进行的通知和第1通知部61进行的通知有所不同。例如,在第1通知部61的通知和第2通知部62的通知中,音色、声音的内容、光的颜色及强度、闪光的模式、振动的模式等不相同。
[0056]
运算部50可以在载台范围a的整体落入在卸放范围b的情况下使通知进行。运算部50可以在载台范围a的整体落入在恰当卸放范围c的情况下使通知进行。
[0057]
(信息输出)运算部50可以在载台范围a未落入在卸放范围b时输出在载台范围a落入到卸放范围b为止使运输车10移动所必要的某个距离的信息(剩余距离)。同样,运算部50也可以在载台范围a未落入在恰当卸放范围c时输出在载台范围a落入到恰当卸放范围c为止使运输车10移动所必要的某个距离的信息(剩余距离)。剩余距离的信息例如可以通过声音或显示等通知运输车10的司机(下述的移动方向的信息也同样)。
[0058]
运算部50可以在载台范围a未落入在卸放范围b时输出用于让载台范围a落入到卸放范围b中的运输车10的移动方向的信息(关于恰当卸放范围c也同样)。更详细而言,运算部50根据距离图像获取部40所获取的距离图像,计算并输出图3所示的角度θ。角度θ是载台12的平面部13相对于上部回转体23(工程机械20)的角度(倾斜)。具体而言例如,角度θ是前后方向x与平面部13所成的角度。更详细而言,角度θ是前后方向x与载台12的平面部13中最接近于上部回转体23的面(在图3为后侧面13b)所成的角度。此外,运算部50也可以在载台范围a落入在卸放范围b时计算并输出角度θ的信息(恰当卸放范围c也同样)。
[0059]
(其他的输出)运算部50可以在载台范围a的至少局部落入在卸放范围b的情况下输出表示其内容(载台范围a落入在卸放范围b)的信号(恰当卸放范围c也同样)。运算部50也可以输出出于第1通知部61和第2通知部62的通知以外的目的的信号。
[0060]
(关于工程机械20的远程或自动操作)在操作人员处于图1所示的工程机械20的驾驶舱23a内的情况下,操作人员能够判
断运输车10的位置是否为能够进行装载作业的位置。因此,在运输车10到达能够进行装载作业的位置时,操作人员能够对运输车10的司机进行通知(具体而言为停止的信号)。另一方面,在工程机械20被自动操纵的情况下,无法进行上述的操作人员的判断。因此,希望能够自动地判定运输车10的位置是否为能够进行装载作业的位置。此外,在工程机械20被远程操作的情况下,操作人员通过观察画面来操作工程机械20。因此,操作人员难以把握到从工程机械20至运输车10的距离,难以判断运输车10的位置是否为能够进行装载作业的位置。另一方面,在本实施方式的运输车位置判定装置30,能够自动地判定运输车10的位置是否为能够进行装载作业的位置。此外,在本实施方式中,工程机械20可以不被自动操作,可以不被远程操作,操作人员可以在驾驶舱23a内。
[0061]
(效果)上述实施方式的运输车位置判定装置的效果如下。
[0062]
运输车位置判定装置用于具有附属设备的工程机械。附属设备进行被装载到运输车的载台上的装载对象物的搬运及卸放。运输车位置判定装置具备距离图像获取部和运算部。
[0063]
距离图像获取部获取载台的距离图像。运算部根据距离图像获取部获取的载台的距离图像,设定关于载台的位置的范围亦即载台范围。
[0064]
运算部获取关于附属设备能够卸放装载对象物的区域的范围亦即卸放范围。运算部判定载台范围的至少局部是否落入在卸放范围。
[0065]
根据该构成,运算部自动地判定运输车的载台范围a的至少局部是否落入在工程机械的卸放范围。由此,运算部能够自动地判定运输车是否被配置在载台范围落入在卸放范围那样的位置。此处,载台范围根据载台的距离图像而被设定。由此,即使在载台被变更的情况下,根据变更后的载台的距离图像,来设定载台范围。由此,即使在运输车的种类被变更的情况下,也能够自动地判定载台范围是否落入在卸放范围。因此,即使在运输车的种类被变更的情况下,也能够判定运输车相对于工程机械的位置。
[0066]
此外,工程机械具备下部行走体和能够相对于下部行走体回转的上部回转体。
[0067]
在上部回转体处于特定的姿势的情况下,运算部将卸放范围设定在载台的面中最远离上部回转体的面与最接近上部回转体的面之间的上部回转体的前后方向的区域的至少局部。特定的姿势是前后方向与多个面中的任意1个面正交的姿势。
[0068]
根据该构成,载台范围例如被设定于前后方向两端的2面(例如后侧面13b及前侧面13d)之间的区域的至少局部。由此,能够将载台范围设定在基于载台的位置而恰当的范围。其结果,在判定为载台范围落入在卸放范围的情况下,能够提高将装载对象物从附属设备装载到载台的可能性。
[0069]
载台范围被设定在相对于载台而位于上侧的区域的至少局部。
[0070]
根据该构成,载台范围被设定于相对于载台而位于上侧的区域的至少局部。由此,能够将载台范围设定在基于载台的位置而恰当的范围。其结果,在判定为载台范围落入在卸放范围的情况下,能够提高将装载对象物从附属设备装载到载台的可能性。
[0071]
载台范围被设定于俯视下与载台重叠的区域的至少局部。
[0072]
根据该构成,载台范围被设定于俯视下与载台重叠的区域的至少局部。由此,能够将载台范围设定在基于载台的位置而恰当的范围。其结果,在判定为载台范围落入在卸放
范围的情况下,能够提高将装载对象物从附属设备装载到载台的可能性。
[0073]
运输车位置判定装置还具备输出声音、光及振动中的至少任意一者的通知的第1通知部。在载台范围的至少局部落入在卸放范围的情况下,运算部使第1通知部进行通知。
[0074]
根据该构成,能够对人员(例如运输车的司机等)通知载台范围的至少局部落入在卸放范围。
[0075]
在载台范围未落入在卸放范围时,运算部输出在载台范围的至少局部落入到卸放范围为止使运输车移动的距离的信息。
[0076]
根据该构成,运算部通过输出在载台范围的至少局部落入到卸放范围为止使运输车移动的距离的信息,能够对人员(例如运输车的司机等)或计算机等传达剩余距离的信息。
[0077]
运算部获取包含在卸放范围且比卸放范围窄的恰当卸放范围,并且判定载台范围a的至少局部是否落入在恰当卸放范围。
[0078]
根据该构成,恰当卸放范围根据附属设备进行的作业(以下简略为“作业”)的效率而被决定。由此,在恰当卸放范围以在该恰当卸放范围的内侧进行作业比在该恰当卸放范围的外侧进行作业时的作业的效率更好的方式而被设定的情况下,且在恰当卸放范围的内侧进行作业的情况下,能够提高作业的效率。
[0079]
运输车位置判定装置具备输出声音、光及振动中的至少任意一者的通知的第2通知部。在载台范围的至少局部落入在恰当卸放范围的情况下,运算部使第2通知部进行通知。
[0080]
根据该构成,能够通知人员(例如运输车的司机等)载台范围的至少局部落入在恰当卸放范围。
[0081]
在载台范围未落入在恰当卸放范围时,运算部输出在载台范围落入到恰当卸放范围为止使运输车10移动的距离的信息。
[0082]
根据该构成,运算部通过输出在载台范围落入到恰当卸放范围为止使运输车移动的距离的信息,能够对人员(例如运输车的司机等)或计算机等传达剩余距离的信息。
[0083]
运算部根据距离图像获取部所获取的距离图像,计算并输出载台的平面部相对于工程机械的角度。
[0084]
根据该构成,基于运算部输出角度,能够对人员(例如运输车的司机)或计算机等传达角度。
[0085]
在关于前后方向的载台范围的至少局部落入在关于前后方向的卸放范围的情况下,运算部判定为载台范围落入在卸放范围。
[0086]
根据该构成,能够着眼于前后方向来判定载台范围的至少局部是否落入在卸放范围。
[0087]
在关于上部回转体的上下方向的载台范围的至少局部落入在关于上下方向的卸放范围的情况下,运算部判定为载台范围落入在卸放范围。
[0088]
根据该构成,能够着眼于上下方向来判定载台范围的至少局部是否落入在卸放范围。
[0089]
在关于上部回转体的前后方向及横向的载台范围的至少局部落入在关于前后方向及横向的卸放范围的情况下,运算部判定为载台范围落入在卸放范围。
[0090]
根据该构成,能够着眼于前后方向及上下方向来判定载台范围的至少局部是否落入在卸放范围。
[0091]
(变形例)上述实施方式可以进行各种各样的变形。例如,上述实施方式的各组成部分的配置及形状可以被变更。例如,组成部分的数量可以被变更,组成部分的一部分可以不被设置。例如,作为彼此不同的多个构件或部分而被说明的这些构件或部分可以是一个构件或部分。例如,作为一个构件或部分而被说明的该构件或部分可以被分为彼此不同的多个构件或部分而被设置。例如,载台区域α或载台范围a可以是相对于载台12的规定的区域或范围,可以通过手动操作而被变更,可以根据某些条件而自动地被变更(卸放区域β、卸放范围b及恰当卸放范围c也同样)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。