技术特征:
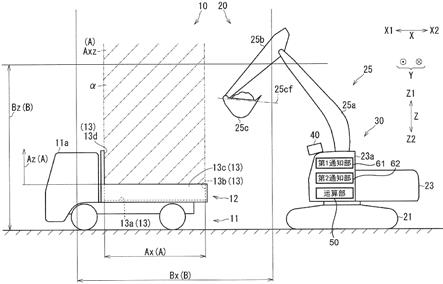
1.一种运输车位置判定装置,用于工程机械,该工程机械具有进行将装载对象物装载到运输车的载台的搬运及卸放的附属设备,该运输车位置判定装置的特征在于包括:距离图像获取部,获取所述载台的距离图像;以及,运算部;其中,所述运算部,根据所述距离图像获取部获取的所述载台的所述距离图像,设定关于所述载台的位置的范围亦即载台范围,获取关于所述附属设备能够卸放所述装载对象物的区域的范围亦即卸放范围,判定所述载台范围的至少局部是否落入在所述卸放范围。2.根据权利要求1所述的运输车位置判定装置,其特征在于,所述工程机械包括:下部行走体;以及,上部回转体,能够相对于所述下部行走体回转;其中,所述载台具有底面和包围所述底面的多个面,在所述上部回转体处于特定的姿势的情况下,所述运算部将所述卸放范围设定在所述载台的面中最远离所述上部回转体的面与最接近所述上部回转体的面之间的所述上部回转体的前后方向的区域的至少局部,所述特定的姿势是所述前后方向与所述多个面中的任意1个面正交的姿势。3.根据权利要求1或2所述的运输车位置判定装置,其特征在于:所述载台范围被设定在相对于所述载台而位于上侧的区域的至少局部。4.根据权利要求1至3中任一项所述的运输车位置判定装置,其特征在于:所述载台范围被设定在俯视下与所述载台重叠的区域的至少局部。5.根据权利要求1至4中任一项所述的运输车位置判定装置,其特征在于还包括:第1通知部,输出声音、光及振动中的至少任意一者的通知;其中,在所述载台范围的至少局部落入在所述卸放范围的情况下,所述运算部使所述第1通知部进行通知。6.根据权利要求1至5中任一项所述的运输车位置判定装置,其特征在于:在所述载台范围未落入在所述卸放范围时,所述运算部输出在所述载台范围的至少局部落入到所述卸放范围为止使所述运输车移动的距离的信息。7.根据权利要求1至6中任一项所述的运输车位置判定装置,其特征在于:所述运算部,获取包含在所述卸放范围且比该卸放范围窄的恰当卸放范围,判定所述载台范围的至少局部是否落入在所述恰当卸放范围。8.根据权利要求7所述的运输车位置判定装置,其特征在于还包括:第2通知部,输出声音、光及振动中的至少任意一者的通知;其中,在所述载台范围的至少局部落入在所述恰当卸放范围的情况下,所述运算部使所述第2通知部进行通知。9.根据权利要求7或8所述的运输车位置判定装置,其特征在于:在所述载台范围未落入在所述恰当卸放范围时,所述运算部输出在所述载台范围落入
到所述恰当卸放范围为止使所述运输车移动的距离的信息。10.根据权利要求1至9中任一项所述的运输车位置判定装置,其特征在于:所述运算部根据所述距离图像获取部获取的所述距离图像,计算并输出所述载台的面的相对于所述工程机械的角度。11.根据权利要求2所述的运输车位置判定装置,其特征在于:在关于所述前后方向的所述载台范围的至少局部落入在关于所述前后方向的所述卸放范围的情况下,所述运算部判定为所述载台范围落入在所述卸放范围。12.根据权利要求3所述的运输车位置判定装置,其特征在于:在关于上部回转体的上下方向的所述载台范围的至少局部落入在关于所述上下方向的所述卸放范围的情况下,所述运算部判定为所述载台范围落入在所述卸放范围。13.根据权利要求4所述的运输车位置判定装置,其特征在于:在关于上部回转体的前后方向及横向的所述载台范围的至少局部落入在关于所述前后方向及横向的所述卸放范围的情况下,所述运算部判定为所述载台范围落入在所述卸放范围。
技术总结
本发明的运输车位置判定装置包括获取载台的距离图像的距离图像获取部和运算部。运算部根据距离图像获取部所获取的载台的距离图像,设定关于载台的位置的范围亦即载台范围。运算部获取关于在工程机械不行走而附属设备动作时能够从附属设备卸放装载对象物的区域的范围亦即卸放范围。运算部判定载台范围是否落入在卸放范围。落入在卸放范围。落入在卸放范围。
技术研发人员:藤原翔 细幸广 邱进军
受保护的技术使用者:神钢建机株式会社
技术研发日:2020.07.06
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。