技术特征:
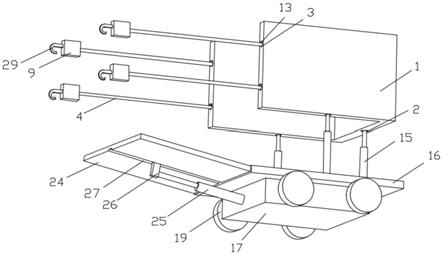
1.基于视觉引导的多轴同时装箱搬运机构,包括装箱搬运臂(1),其特征在于:所述装箱搬运臂(1)上设有搬运安装座(2),搬运安装座(2)的一侧设有搬运活动座(3),搬运活动座(3)和搬运安装座(2)通过水平位移驱动机构连接,搬运安装座(2)和搬运活动座(3)的下方均设有第一搬运控制箱(4)和第二搬运控制箱(5),搬运安装座(2)和搬运活动座(3)上均设有异向调节驱动机构,且第一搬运控制箱(4)和第二搬运控制箱(5)通过异向调节驱动机构连接,第一搬运控制箱(4)和第二搬运控制箱(5)上设有工件同步夹持组件;工件同步夹持组件包括开设于第一搬运控制箱(4)和第二搬运控制箱(5)底部内壁的第一活动孔(6),第一活动孔(6)为十字形结构,第一搬运控制箱(4)和第二搬运控制箱(5)内均设有两个第一活动调节块(8),第一活动调节块(8)的底部固定连接有第一支撑夹持柱(9),第一搬运控制箱(4)和第二搬运控制箱(5)内均设有两个第二活动调节块(10),第二活动调节块(10)的底部固定连接有第二支撑夹持柱(11),第一支撑夹持柱(9)和第二支撑夹持柱(11)均贯穿第一活动孔(6),第一搬运控制箱(4)和第二搬运控制箱(5)内均设有第一双向调节丝杠(12),第一搬运控制箱(4)和第二搬运控制箱(5)的两侧内壁均设有第一轴承(13),且第一轴承(13)和第一双向调节丝杠(12)的端部连接,第一搬运控制箱(4)和第二搬运控制箱(5)内均设有第二双向调节丝杠(14),第一搬运控制箱(4)和第二搬运控制箱(5)的两侧内壁均设有第二轴承(15),且第二轴承(15)和第二双向调节丝杠(14)的端部连接,第一双向调节丝杠(12)贯穿相邻两个第一活动调节块(8),且第一活动调节块(8)和第一双向调节丝杠(12)的连接方式为螺纹连接,第二双向调节丝杠(14)贯穿相邻两个第二活动调节块(10),第二活动调节块(10)和第二双向调节丝杠(14)的连接方式为螺纹连接,第一搬运控制箱(4)和第二搬运控制箱(5)的顶部内壁均开设有通孔(7),通孔(7)内设有第一转轴(16),第一转轴(16)和通孔(7)通过第三轴承(17)连接,第一双向调节丝杠(12)和第二双向调节丝杠(14)通过锥形齿轮传动单元与第一转轴(16)的一端连接,相邻两个第一转轴(16)的另一端通过抽拉式驱动单元连接。2.根据权利要求1所述的基于视觉引导的多轴同时装箱搬运机构,其特征在于:所述锥形齿轮传动单元包括套设于第一双向调节丝杠(12)外部的第一锥形齿轮(18),第一锥形齿轮(18)和第一双向调节丝杠(12)固定连接,第一转轴(16)的一端固定连接有第二锥形齿轮(19),第二双向调节丝杠(14)的外部套设有第三锥形齿轮(20),第三锥形齿轮(20)和第二双向调节丝杠(14)固定连接,第一搬运控制箱(4)和第二搬运控制箱(5)的顶部内壁均固定连接有第一固定支撑板(22),第一固定支撑板(22)的一侧设有第二转轴(23),第二转轴(23)贯穿第一固定支撑板(22),第二转轴(23)和第一固定支撑板(22)的贯穿处设有第四轴承(24),第二转轴(23)的一端固定连接有第四锥形齿轮(21),第二转轴(23)的另一端固定连接有第五锥形齿轮(25),第一转轴(16)的外部套设有第六锥形齿轮(26),第六锥形齿轮(26)和第一转轴(16)固定连接。3.根据权利要求2所述的基于视觉引导的多轴同时装箱搬运机构,其特征在于:所述第一锥形齿轮(18)和第二锥形齿轮(19)相啮合,第三锥形齿轮(20)和第四锥形齿轮(21)相啮合,第五锥形齿轮(25)和第六锥形齿轮(26)相啮合。4.根据权利要求1所述的基于视觉引导的多轴同时装箱搬运机构,其特征在于:所述抽拉式驱动单元包括设置于第一搬运控制箱(4)顶部的第二固定支撑板(29),第二固定支撑板(29)和第一搬运控制箱(4)固定连接,第二搬运控制箱(5)的顶部固定连接有第三固定支
撑板(30),第二固定支撑板(29)的一侧设有第一驱动电机(31),第一驱动电机(31)的输出端设有第一蜗杆(32),第一搬运控制箱(4)的上方设有第一蜗轮(27),第一蜗轮(27)和第一转轴(16)的一端固定连接,第二搬运控制箱(5)的上方设有第二蜗轮(28),第二蜗轮(28)和第一转轴(16)的一端固定连接,第三固定支撑板(30)的一侧设有第二蜗杆(33),第二蜗杆(33)的一端与第三固定支撑板(30)通过第五轴承(34)连接,第一蜗杆(32)的一端固定连接有固定连接柱(35),固定连接柱(35)的一端开设有插槽(36),插槽(36)的内壁上开设有第二活动孔(37),第二蜗杆(33)上固定连接有限位滑块(38)。5.根据权利要求4所述的基于视觉引导的多轴同时装箱搬运机构,其特征在于:所述第二蜗杆(33)的一端位于插槽(36)内,限位滑块(38)位于第二活动孔(37)内,第一蜗轮(27)和第一蜗杆(32)相啮合,第二蜗轮(28)和第二蜗杆(33)相啮合。6.根据权利要求1所述的基于视觉引导的多轴同时装箱搬运机构,其特征在于:所述异向调节驱动机构包括两个设置于第一搬运控制箱(4)顶部的第四固定支撑板(41),第四固定支撑板(41)和第一搬运控制箱(4)固定连接,第二搬运控制箱(5)的顶部固定连接有两个第五固定支撑板(42),搬运安装座(2)和搬运活动座(3)的底部均设有第一双轴电机(39)和第二双轴电机(40),第一双轴电机(39)的两个输出端分别设有第一单向丝杠(43)和第一支撑限位柱(44),第二双轴电机(40)的两个输出端分别设有第二支撑限位柱(45)和第二单向丝杠(46),第一单向丝杠(43)和第二支撑限位柱(45)分别贯穿两个第四固定支撑板(41),第一支撑限位柱(44)和第二单向丝杠(46)分别贯穿两个第五固定支撑板(42),第一单向丝杠(43)和第四固定支撑板(41)的连接方式为螺纹连接,第二单向丝杠(46)与第五固定支撑板(42)的连接方式为螺纹连接。7.根据权利要求1所述的基于视觉引导的多轴同时装箱搬运机构,其特征在于:所述第一搬运控制箱(4)和第二搬运控制箱(5)的两侧均固定连接有限位支撑板(47),限位支撑板(47)上开设有第一限位滑槽(48),搬运安装座(2)和搬运活动座(3)的底部均固定连接有四个限位条(49)。8.根据权利要求7所述的基于视觉引导的多轴同时装箱搬运机构,其特征在于:所述限位条(49)贯穿第一限位滑槽(48),且第一限位滑槽(48)和限位条(49)的横截面均为t形结构。9.根据权利要求1所述的基于视觉引导的多轴同时装箱搬运机构,其特征在于:所述水平位移驱动机构包括开设于搬运安装座(2)上的凹槽(50),凹槽(50)内设有第二驱动电机(51),搬运活动座(3)的一侧开设有螺纹孔(53),第二驱动电机(51)的输出端设有第三单向丝杠(52),搬运活动座(3)靠近搬运安装座(2)的一侧开设有两个第二限位滑槽(54),搬运安装座(2)靠近搬运活动座(3)的一侧固定连接有两个限位滑板(55)。10.根据权利要求9所述的基于视觉引导的多轴同时装箱搬运机构,其特征在于:所述第三单向丝杠(52)贯穿螺纹孔(53),限位滑板(55)位于第二限位滑槽(54)内,第二限位滑槽(54)内设有若干第三转轴(56),第三转轴(56)位于限位滑板(55)的上方,第三转轴(56)的外部套设有若干滚轮(57),滚轮(57)的底部与限位滑板(55)的顶部相接触,第三转轴(56)的两端均通过第六轴承(58)与第二限位滑槽(54)的内壁连接。
技术总结
本发明涉及装箱搬运技术领域,且公开了基于视觉引导的多轴同时装箱搬运机构,解决了人工搬运效率低,人工劳动量大,而自动化装箱搬运机构不便于对多个线圈进行同时装箱搬运,存在一定的局限性,不便于实际使用的问题,其包括装箱搬运臂,所述装箱搬运臂上设有搬运安装座,搬运安装座的一侧设有搬运活动座,搬运活动座和搬运安装座通过水平位移驱动机构连接,搬运安装座和搬运活动座的下方均设有第一搬运控制箱和第二搬运控制箱,搬运安装座和搬运活动座上均设有异向调节驱动机构;便于对线圈进行固定,可以使得四个线圈紧靠在一起,进而便于把线圈放置于箱子内,提高了工作效率。提高了工作效率。提高了工作效率。
技术研发人员:毛健文 刘传彬 王炳龙 陈国栋 徐海飞 夏海洋 贾建义 叶贤刚
受保护的技术使用者:常州万码智能科技有限公司
技术研发日:2022.04.12
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。