技术特征:
1.一种光照度自动调节方法,其特征在于,包括:对光照度误差、光照度误差变化率和光照度控制量进行模糊量化;将模糊量化后的所述光照度误差通过光照度误差量化因子进行论域变化,得到光照度误差赋值表;将模糊量化后的所述光照度误差变化率,通过光照度误差变化率量化因子进行论域变化,得到光照度误差变化率赋值表;将模糊量化后的所述光照度控制量,通过比例因子进行论域变化,并对模糊量化的所述光照度控制量进行反模糊量化处理,得到光照度控制量赋值表;获取光照度误差和光照度误差变化率的输入值,根据所述输入值,查询预设的模糊控制规则表和所述光照度误差赋值表、所述光照度误差变化率赋值表、所述光照度控制量赋值表,得到需要的光照度控制量;将查询得到的所述需要的光照度控制量,通过所述比例因子计算得到已就绪的光照度控制量;所述已就绪的光照度控制量可被执行机构读取,实现光照度自动调节。2.根据权利要求1所述的一种光照度自动调节方法,其特征在于,所述光照度误差和所述光照度误差变化率的模糊集均为{pb,pm,ps,z,ns,nm,nb};所述光照度控制量的模糊集为{pb,ps,z,ns,nb},pb、pm、ps、z、ns、nm、nb分别表示语言值。3.根据权利要求1所述的一种光照度自动调节方法,其特征在于,所述光照度误差的基本论域为xj=[-xj,xj](xj>0)=[-4,4],所述光照度误差变化率的量化论域为nj=[-nj,nj](nj>0)={-3,-2,-1,0, 1, 2, 3},所述光照度误差变化率量化因子ke=nj/xj=3/4=0.75。4.根据权利要求1所述的一种光照度自动调节方法,其特征在于,所述光照度误差变化率的基本论域为yj=[-yj,yj](yj>0)=[-1,1],所述光照度误差变化率的量化论域为mj=[-mj,mj](mj>0)={-3,-2,-1,0, 1, 2, 3},所述光照度误差变化率量化因子kec=mj/yj=3/1=3。5.根据权利要求1所述的一种光照度自动调节方法,其特征在于,所述光照度控制量的基本论域为n=[-n,n](n>0)=[-8,8];基本论域u=[-u,u](u>0)={-2,-1,0, 1, 2},所述比例因子ku=u/n=8/2=4。6.根据权利要求2所述的一种光照度自动调节方法,其特征在于,所述光照度误差赋值表、所述光照度误差变化率赋值表和所述光照度控制量赋值表的赋值通过正态分布函数计算得到,所述正态分布函数为:a为隶属函数的中心值;θ为隶属函数的宽度;x为光照度误差、光照度误差变化率和光照度控制量。7.根据权利要求1至6任一项所述的一种光照度自动调节方法,其特征在于,所述光照度误差赋值表:
所述光照度误差变化率赋值表:所述光照度控制量赋值表:。8.根据权利要求7所述的一种光照度自动调节方法,其特征在于,所述模糊控制规则表:。9.根据权利要求7所述的一种光照度自动调节方法,其特征在于,对模糊量化的所述光照度控制量进行反模糊量化处理,包括:采用以下公式对模糊量化的所述光照度控制量进行反模糊量化处理光照度控制量:
光照度控制量其中,所述lu为反模糊量化处理后的所述光照度控制量,n为光照度控制量的量化论域上限,xi为模糊量化的所述光照度控制量。10.一种光照度自动调节执行机构,其特征在于,包括:光照控制装置和控制器;所述控制器,用于读取如权利要求1至9任一项所述光照度自动调节方法所得到的已就绪的光照度控制量,根据所述已就绪的光照度控制量控制所述光照控制装置,实现光照度自动调节。
技术总结
本发明涉及智能控制领域,更具体地,涉及一种光照度自动调节方法和执行机构。本发明通过基于模糊控制的调节方法,不仅将光照度调节在作物生长的适宜范围内,还使光照度遵循专业人员的长期工作实践经验而变化,提高了光照度的控制精度,更贴合于作物需求。此外,执行机构的动作连续,在超调量和稳定性上体现了明显的控制优势,有利于延长执行机构的使用寿命。有利于延长执行机构的使用寿命。有利于延长执行机构的使用寿命。
技术研发人员:李相国 冯敏 李绿欣 连良秀
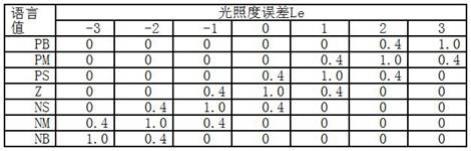
受保护的技术使用者:宏景科技股份有限公司
技术研发日:2022.04.11
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。