1.本发明涉及在飞行器接近着陆跑道期间使用的飞行器导航和控制系统的领域。
背景技术:
2.通常为机场的每条着陆跑道公布一个或多个预定进场。对于机场的预定进场,公布的信息通常至少包括:着陆跑道的取向、着陆跑道进场轴线的坡度和取向以及判定高度,在低于该高度时,飞行器飞行员应该能看到着陆跑道,以便能够着陆到着陆跑道上。许多着陆跑道都配备了仪表着陆系统(称为ils)的发射信标。这些信标通常对应于发射侧向引导系统(称为“loc”)的信标以及发射竖直引导信号(称为“glide”)的信标。由这些信标发射的信号允许配备有ils信号接收器的飞行器遵循着陆跑道的进场轴线,该进场轴线基本上对应于为该着陆跑道公布的进场轴线。有几种仪表进场类别,主要基于着陆跑道所配备的ils信标的准确性、着陆跑道上游地形的轮廓以及嵌入到飞行器上的ils信号接收器的准确性。最常见的类别是类别1(cat i),其判定高度通常为200ft(约60米),要求着陆跑道的能见度至少为550m。对于类别2(cat ii),判定高度为100ft(约30m),要求着陆跑道的能见度至少为300m。对于类别3a(cat iiia),判定高度为50ft(约15m),要求着陆跑道的能见度至少为175m。对于类别3b(cat iiib),判定高度为零,要求着陆跑道的能见度至少为50m。对于类别3c(cat iiic),不要求着陆跑道的能见度。因此,cat iiic进场使得能够在看不到着陆跑道的情况下完全自动着陆。然而,很少有着陆跑道配备有允许cat iiic进场的ils信标,一方面是因为这种信标的高准确性需求、与跑道入口上游地形相关的要求(较小高度差等)以及与着陆跑道的照明相关的要求。为了限制飞行器飞行员在着陆阶段期间的工作量,希望飞行器能够通常自动着陆,而无论飞行员能否看到跑道,甚至在没有提供cat iiic进场的着陆跑道上,例如提供了cat i进场的着陆跑道。
技术实现要素:
3.本发明的目的特别是为了提供对该问题的解决方案。本发明涉及一种用于辅助飞行器根据机场的着陆跑道的预定进场着陆到所述着陆跑道上的系统,所述着陆辅助系统值得注意的地方在于其包括处理单元,所述处理单元被配置为:
4.在根据所述预定进场进行着陆跑道进场过程的第一阶段期间,当所述飞行器相对于着陆跑道入口飞到预定高度以上时:
[0005]-从嵌入到所述飞行器上的ils引导信号接收器获取信息;
[0006]-从嵌入到所述飞行器上的卫星导航系统的信号接收器获取飞行器位置和速度信息;
[0007]-从嵌入到所述飞行器上的惯性单元获取飞行器位置和速度信息;
[0008]-根据来自所述ils引导信号接收器的所述信息和来自所述卫星导航系统的信号接收器的所述飞行器位置和速度信息来确定所谓的合并飞行器位置和速度信息;
[0009]-根据所述合并位置和速度信息来确定来自所述惯性单元的位置和速度信息的偏
差;并且
[0010]-基于来自所述ils引导信号接收器的信息来控制所述飞行器的引导,
[0011]
然后
[0012]
在根据所述预定进场进行所述着陆跑道进场过程的第二阶段期间,当所述飞行器相对于所述着陆跑道入口飞到所述预定高度以下时:
[0013]-从所述惯性单元获取飞行器位置和速度信息;
[0014]-通过对来自所述惯性单元的飞行器位置和速度信息应用与在所述进场过程的第一阶段期间确定的偏差相对应的校正,来确定所谓的调整后的飞行器位置和速度信息;并且
[0015]-根据所述调整后的位置和速度信息,沿着与所述预定进场相对应的着陆跑道进场轴线控制所述飞行器的引导。
[0016]
因此,该系统使得当飞行器飞到预定高度以下时能够克服仪表着陆系统ils的不准确性,该预定高度优选地被选择为至少等于与所考虑的预定进场相对应的判定高度。事实上,根据本发明,在该预定高度以下时,仅基于在飞行器上确定的信息(根据来自惯性单元的信息确定的调整后的信息)来引导飞行器。不使用来自飞行器外部系统的信息的事实使得能够克服这种飞行器外部系统(仪表着陆系统ils或卫星导航系统)的不准确性和失效模式。已知,来自惯性单元的信息会随时间漂移。然而,在足够短的持续时间内,来自惯性单元的信息的漂移可以被认为可忽略不计,于是该信息具有非常高的可靠性和准确性。现在,当飞行器飞到所述预定高度以下时,进场过程的第二阶段的持续时间足够短,使得在此时期期间来自惯性单元的信息的漂移被认为可忽略不计。此外,根据所述合并位置和速度信息来确定来自惯性单元的位置和速度信息的偏差使得能够以足够的准确性确定该偏差,以便根据该偏差来调整来自惯性单元的位置和速度信息,从而允许在进场过程的第二阶段期间对飞行器进行足够准确的引导。事实上,该合并信息是根据来自ils引导信号接收器的信息和来自卫星导航系统的信号接收器的飞行器位置和速度信息来确定的。因此,在来自ils引导信号接收器的信息暂时不准确的情况下,例如在ils信号有多条路径的情况下,借助于来自卫星导航系统的信号接收器的飞行器位置和速度信息来校正这种不准确。
[0017]
有利地,所述处理单元还被配置为:
[0018]-从机场数据库获取与所述着陆跑道相关的信息,
[0019]-根据与所述着陆跑道相关的所述信息来确定所述着陆跑道的取向,
[0020]-根据来自所述ils引导信号接收器的所述飞行器位置和速度信息和来自所述卫星导航系统的信号接收器的所述飞行器位置和速度信息来确定所述着陆跑道进场轴线的取向,
[0021]-确定所述着陆跑道的取向与所述进场轴线的取向之间的偏离;并且
[0022]-还根据所述偏离来确定来自所述惯性单元的位置和速度信息的所述偏差。
[0023]
在特定实施例中,所述处理单元被配置为在所述第一阶段期间基于来自所述ils引导信号接收器的已校正了所述偏离的信息来控制所述飞行器的引导。
[0024]
在特定实施例中,所述处理单元被配置为通过至少一个卡尔曼滤波器来确定所述合并飞行器位置和速度信息,所述至少一个卡尔曼滤波器至少接收来自所述ils引导信号接收器的所述信息和来自所述卫星导航系统的信号接收器的所述飞行器位置和速度信息
作为输入。
[0025]
有利地,所述处理单元还被配置为在所述进场过程的第二阶段期间确定所述飞行器相对于所述着陆跑道的入口的当前高度,并将所述飞行器的这个当前高度发射到所述飞行器的引导系统以根据所述当前高度来控制拉平操纵。
[0026]
同样有利的是,所述处理单元还被配置为在所述进场过程的第一阶段期间确定所述飞行器相对于所述着陆跑道的入口的当前高度,并将这个当前高度发射到所述飞行器的引导系统以根据所述当前高度来准备拉平操纵。
[0027]
具体地,所述处理单元被配置为根据所述进场轴线的坡度以及所述飞行器的当前高度与所述跑道入口的位置之间的距离来确定所述飞行器的当前高度。
[0028]
在一个实施例中,所述处理单元形成所述飞行器的航空电子计算机的一部分,特别是所述飞行器的飞行控制计算机的一部分。
[0029]
本发明还涉及一种用于辅助飞行器根据机场的着陆跑道的预定进场着陆到所述着陆跑道上的方法。此方法值得注意的地方在于,所述方法包括由嵌入到所述飞行器上的处理单元实施的以下步骤:
[0030]
在根据所述预定进场进行着陆跑道进场过程的第一阶段期间,当所述飞行器相对于着陆跑道入口飞到预定高度以上时:
[0031]-从嵌入到所述飞行器上的ils引导信号接收器获取信息;
[0032]-从嵌入到所述飞行器上的卫星导航系统的信号接收器获取飞行器位置和速度信息;
[0033]-从嵌入到所述飞行器上的惯性单元获取飞行器位置和速度信息;
[0034]-根据来自所述ils引导信号接收器的所述信息和来自所述卫星导航系统的信号接收器的所述飞行器位置和速度信息来确定所谓的合并飞行器位置和速度信息;
[0035]-根据所述合并位置和速度信息来确定来自所述惯性单元的位置和速度信息的偏差;以及
[0036]-基于来自所述ils引导信号接收器的信息来控制所述飞行器的引导,
[0037]
然后
[0038]
在根据所述预定进场进行所述着陆跑道进场过程的第二阶段期间,当所述飞行器相对于所述着陆跑道入口飞到所述预定高度以下时:
[0039]-从所述惯性单元获取飞行器位置和速度信息;
[0040]-通过对来自所述惯性单元的飞行器位置和速度信息应用与在所述进场过程的第一阶段期间确定的偏差相对应的校正,来确定所谓的调整后的飞行器位置和速度信息;以及
[0041]-根据所述调整后的位置和速度信息,沿着与所述预定进场相对应的着陆跑道进场轴线控制所述飞行器的引导。
[0042]
本发明还涉及一种包括如上所述的着陆辅助系统的飞行器。
附图说明
[0043]
通过阅读以下说明并研究附图将更好地理解本发明。
[0044]
图1是包括根据本发明的实施例的着陆辅助系统的飞行器的视图。
[0045]
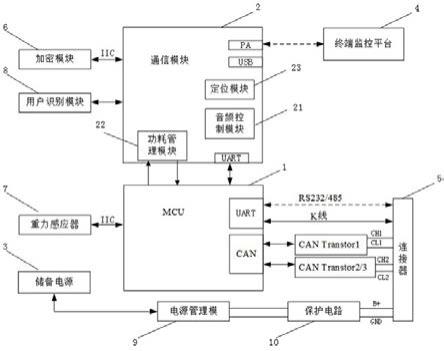
图2示意性地展示了根据本发明的实施例的着陆辅助系统。
[0046]
图3是着陆跑道和该着陆跑道的进场轴线的透视图。
[0047]
图4是着陆跑道和该着陆跑道的进场轴线在竖直平面上的截面视图。
具体实施方式
[0048]
图2中表示的着陆辅助系统10包括处理单元12(proc),该处理单元在输入端处链接至嵌入到飞行器上的ils信号接收器14、至嵌入到飞行器上的卫星导航系统的接收器16(例如多模式接收器mmr)、以及至嵌入到飞行器上的惯性单元18(图中标记为irs,代表“inertial reference system(惯性参考系统)”)。处理单元12还链接至机场数据库22。处理单元12在输出端处链接至飞行器的引导计算机20(图中标记为guid),例如飞行控制计算机。处理单元12优选地形成飞行器的航空电子计算机的一部分。该航空电子计算机例如结合到航空电子设备舱2中,该航空电子设备舱位于飞行器1的驾驶舱3附近,如图1所示。处理单元12包括例如微处理器或微控制器。有利地,所述航空电子计算机对应于飞行器的飞行控制计算机,比如计算机20。然而,在不脱离本发明的范围的情况下,该航空电子计算机也可以对应于飞行器的另一计算机,如例如ima(“集成模块化航空电子设备”)类型的模块化航空电子计算机。卫星导航系统的接收器16例如是gnss(“全球导航卫星系统”)类型(例如gps(“全球定位系统”)类型)的系统的接收器。
[0049]
在操作中,当飞行器的飞行员希望飞行器着陆到机场的着陆跑道(比如图3中表示的着陆跑道30)上时,他或她通常通过飞行器驾驶舱的人机界面为所述着陆跑道选择预定的进场过程,该人机界面链接至fms类型的飞行管理计算机。处理单元12接收关于由飞行员选择以着陆到着陆跑道上的进场过程的信息。在飞行器接近着陆跑道时,在根据由飞行员选择的预定进场进行着陆跑道进场过程的第一阶段期间,当飞行器相对于着陆跑道入口飞到预定高度以上时,处理单元12进行以下操作:
[0050]-从ils引导信号接收器14获取信息;
[0051]-从卫星导航系统的信号接收器16获取飞行器位置和速度信息;
[0052]-从惯性单元18获取飞行器位置和速度信息;
[0053]-根据来自ils引导信号接收器14的所述信息和来自卫星导航系统的信号接收器16的所述飞行器位置和速度信息来确定所谓的合并飞行器位置和速度信息;
[0054]-根据所述合并位置和速度信息来确定来自惯性单元18的位置和速度信息的偏差;
[0055]-基于来自ils引导信号接收器16的信息,通过引导计算机20控制飞行器的引导。
[0056]
由ils引导信号接收器14接收的ils引导信号对应于飞行器的当前位置与由ils系统的信标发射的信号定义的进场轴线32之间的偏离。这些偏离对应于飞行器的当前位置。来自卫星导航系统的信号接收器16的飞行器位置和速度信息也对应于飞行器的所述当前位置。处理单元12例如通过卡尔曼滤波器来确定所谓的合并飞行器位置和速度信息,该卡尔曼滤波器一方面接收对应于ils引导信号的所述偏离或根据所述偏离确定的所述当前位置的值、并且另一方面接收来自卫星导航系统的信号接收器16的飞行器位置和速度信息作为输入。卡尔曼滤波器提供所述合并飞行器位置和速度信息作为输出。该合并飞行器位置和速度信息具有高水平的准确性和完整性。事实上,ils引导信号允许在对所述信号没有任
何干扰的情况下准确地引导飞行器。然而,它们可能会受到干扰,比如多条路径,这可能是由于ils系统的信标发射的信号的反射。例如,这些反射可能源自在机场上四处移动或在机场附近低空飞行的飞行器。将对应于ils引导信号的信息与来自卫星导航系统的信号接收器16的信息合并的事实使得能够产生不受对ils引导信号的任何干扰(比如上述多条路径)影响的合并信息作为卡尔曼滤波器的输出。这使得能够保证所述合并飞行器位置和速度信息的高水平准确性和完整性。
[0057]
还从惯性单元18接收飞行器位置和速度信息的处理单元12根据所述合并位置和速度信息来确定来自惯性单元18的所述位置和速度信息的偏差。在第一示例性实施例中,通过计算合并飞行器位置和速度信息与来自惯性单元的位置和速度信息之间的差异来确定该偏差。在第二示例性实施例中,卡尔曼滤波器还接收来自惯性单元的位置和速度信息作为输入并且该卡尔曼滤波器提供所述偏差作为输出,合并飞行器位置和速度信息然后对应于卡尔曼滤波器的内部变量。优选地,在进场过程的第一阶段期间,例如根据预定的采样频率迭代地执行获取信息、确定合并信息和确定偏差的不同步骤。
[0058]
在根据所述预定进场进行着陆跑道进场过程的第二阶段期间,当飞行器相对于着陆跑道入口飞到所述预定高度以下时,处理单元12进行以下操作:
[0059]-从惯性单元18获取飞行器位置和速度信息;
[0060]-通过对来自惯性单元的飞行器位置和速度信息应用与在进场过程的第一阶段期间确定的偏差相对应的校正,来确定所谓的调整后的飞行器位置和速度信息;
[0061]-根据所述调整后的位置和速度信息,沿着与所述预定进场相对应的着陆跑道进场轴线通过引导计算机20控制飞行器的引导。处理单元12用来控制飞行器的引导的所述进场轴线是由处理单元12根据来自机场数据库22的信息来确定的。该进场轴线的原点是跑道入口th1,该入口的位置由处理单元12从机场数据库22中获取。进场轴线的坡度和取向也是从机场数据库22中获取的。处理单元12计算调整后的飞行器位置与所述进场轴线之间的侧向偏离和竖直偏离,并且该处理单元根据所述偏离来控制飞行器的引导。
[0062]
预定高度值例如至少等于为所考虑的进场过程公布的判定高度。例如,对于cat i类型的进场过程,预定高度至少等于200ft(约60m)。因此,当飞行器在着陆跑道进场期间下降到判定高度以下时,它会根据调整后的位置和速度信息被引导。于是,这样使得能够避免根据源自飞行器外部系统的信息来引导飞行器,这样的引导可能会受到干扰(比如多条路径),因为这种调整后的信息是根据来自嵌入到飞行器上的惯性单元18的信息确定的。因此,即使着陆跑道所配备的引导系统属于不允许在看不到着陆跑道的情况下自动着陆的类别,根据本发明的系统10也允许飞行器以足够的准确性和完整性遵循进场轴线,以便在能看到或看不到着陆跑道的情况下执行这种自动着陆。
[0063]
有利地,在进场过程的第一阶段期间,处理单元进一步从机场数据库22获取与着陆跑道相关的信息。具体地,该信息包括与着陆跑道30的两个相反末端相对应的两个跑道入口th1和th2。处理单元根据与着陆跑道相关的所述信息来确定着陆跑道的取向。该取向例如对应于穿过所述两个跑道入口th1和th2的直线33的取向。而且,处理单元进一步根据来自ils引导信号接收器14的飞行器位置和速度信息和来自卫星导航系统的信号接收器16的飞行器位置和速度信息来确定着陆跑道的进场轴线32的取向。有利地,进场轴线的取向通过水平平面中的投影34来确定。进场轴线32相对于其在水平平面中的投影34形成角度α,
该角度α对应于为所考虑的进场过程公布的坡度。进场轴线32是对应于ils引导系统的进场轴线,由ils引导系统的信标发射的信号定义。处理单元12确定着陆跑道的所述取向33与进场轴线的所述取向34之间的偏离e。尽管不是强制性的,但是偏离e例如是以角度偏离的形式定义的。这种偏离在如下情况下可以明显是非零的:当信标在地面上的定位的约束条件使得发射与loc信号相对应的信号的信标的定位与着陆跑道30具有侧向偏离时。然后,处理单元12还根据所述偏离e来确定来自惯性单元18的位置和速度信息的偏差。
[0064]
在特定实施例中,处理单元12在第一阶段期间基于来自ils引导信号接收器14的已校正了所述偏离e的信息来控制飞行器的引导。因此,这样使得能够通过消除着陆跑道的取向33与对应于ils引导系统的进场轴线的投影34之间的所述偏离e,以对准着陆跑道30的方式引导飞行器。
[0065]
在一个实施例中,处理单元12确定飞行器相对于着陆跑道的入口th1的当前高度。有利地,在进场过程的第一阶段期间,处理单元将飞行器的该当前高度发射到引导计算机20,以便允许引导计算机根据所述当前高度来准备拉平操纵,从而将飞行器的轮子设置在着陆跑道上。这种拉平操纵简称为“拉平”。同样有利的是,在进场过程的第二阶段期间,处理单元将飞行器的该当前高度发射到引导计算机20,以便允许引导计算机根据所述当前高度来控制拉平操纵,从而将飞行器的轮子设置在着陆跑道上。该当前高度足够准确,以允许引导计算机在飞行器到达跑道入口之前准备和控制拉平操纵。然而,当飞行器到达跑道入口时,引导计算机20使用来自嵌入到飞行器上的无线电高度计的高度信息。事实上,为了控制飞行器的轮子在着陆跑道上的设置,引导计算机20需要最准确的可能高度信息。现在,当飞行器在着陆跑道上方时,来自无线电高度计的高度信息比由处理单元12确定的所述当前高度更准确。
[0066]
在特定实施例中,处理单元12根据进场轴线32的坡度α以及飞行器的当前位置与跑道入口的位置之间的距离来确定飞行器相对于着陆跑道的入口th1的当前高度。为此,在图4所展示的示例中,处理单元计算飞行器1的当前位置p与跑道入口th1的位置之间的距离d。距离d优选地通过水平平面中的投影来计算。飞行器的当前位置p的值例如是从卫星导航系统的接收器16(特别是在进场过程的第一阶段期间)或从惯性单元18(特别是在进场过程的第二阶段期间)接收的。跑道入口th1的位置的值例如是从机场数据库22中获取的。已知进场轴线32的坡度α,然后通过使用以下公式来计算飞行器相对于跑道入口th1(其海拔由虚线36展示)的当前高度h:
[0067]
h=d
×
tangent(α)
[0068]
有利地,在进场过程的第一阶段期间,处理单元根据角度值α1来校正该当前高度值,该角度值对应于相对于从ils引导信号接收器14接收的竖直引导glide信号的偏离。这使得能够考虑飞行器相对于进场轴线的位置误差。然后根据以下公式计算飞行器的当前高度:
[0069]
h=d
×
tangent(α α1)
[0070]
根据第一变体,进场轴线的坡度角度α被任意选择为等于3
°
。该值对应于大多数所公布进场的坡度。此外,对于具有不同坡度的进场,对应的角度在3
°
左右(在十分之几度以内的程度上)。因此角度误差极小。此外,由于该误差是角度的,因此其对当前高度h的值的影响会随着飞行器接近着陆跑道而减小。
[0071]
根据第二变体,处理单元12从机场数据库22获取角度α的值。然后,该值对应于进场轴线的坡度的公布值。
[0072]
根据第三变体,在处理单元12中存储了针对运营飞行器的航空公司经常使用的一组着陆跑道进场的进场角度值。然后,针对所考虑的进场,由处理单元12在其存储器中读取角度α。该变体使得能够使用角度α的精确值,从而免除了机场数据库22的任何完整性问题。
[0073]
相对于通过嵌入到飞行器上的无线电高度计测量的当前高度,当前高度h具有以下优点:以跑道入口th1的海拔(由线36展示)而不是飞行器飞越的地形35(如无线电高度计的情况)为参考。事实上,使用由无线电高度计测量的相对于地形的飞行器高度信息对于执行拉平操纵并不是最佳的,因为该信息取决于飞行器飞越的地形。这限制了可以在其上自动控制拉平操纵的着陆跑道的数量,因为其排除了跑道上游地形35的起伏不规则的着陆跑道。使用上述当前高度h来执行拉平操纵使得能够克服上述问题,并且因此能够自动控制拉平操纵而不管着陆跑道上游的起伏如何。
[0074]
而且,相对于在飞行器上确定的气压高度,由处理单元12确定的当前高度h还提供了对外部条件(温度、压力等)不敏感的优点。在特定实施例中,飞行器的气压高度用于监测当前高度h。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。