技术特征:
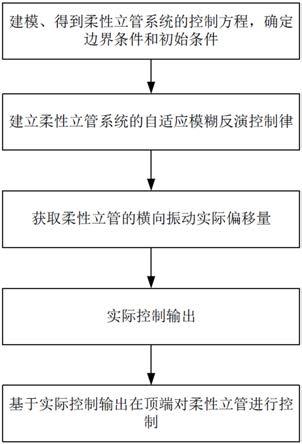
1.针对模型不确定的海洋柔性立管边界振动控制方法,其特征在于,包括:对柔性立管建模、得到柔性立管系统的控制方程,确定柔性立管系统的边界条件和初始条件;基于自适应模糊反演算法,建立柔性立管系统的自适应模糊反演控制律;获取柔性立管的横向振动实际偏移量;将所述实际偏移量代入所述自适应模糊反演控制律,得到实际控制输出;基于所述实际控制输出,在顶端对柔性立管进行控制。2.根据权利要求1所述的针对模型不确定的海洋柔性立管边界振动控制方法,其特征在于,得到所述控制方程的方法包括:基于动力学分析得到柔性立管系统的动能e
k
、势能e
p
、以及非保守力对海洋柔性立管所做的总虚功w0;基于哈密顿原理、通过如下公式得到柔性立管系统的控制方程:;式中,δ为变分操作符,t1、t2分别为两个端点时刻,t为时间变量。3.根据权利要求1所述的针对模型不确定的海洋柔性立管边界振动控制方法,其特征在于,所述柔性立管系统的控制方程为:所述边界条件为:所述初始条件为:;式中:t为时间变量、x为空间变量,l为立管长度,w(x,t)为横向振动实际偏移量,f(x,t)为作用在立管上的分布式海流载荷,d(t)为边界扰动,m
s
为船舶质量,ρ为单位立管质量,ei为立管弯曲刚度,t为立管张力,c为结构阻尼系数,d
s
为船舶阻尼系数;u(t)为作用在立管顶端的边界控制量;为w(x,t)对t的一阶偏导,为w(x,t)对t的二阶偏导;为w(x,t)对x的二阶偏导,为w(x,t)对x的四阶偏导;为w(x,t)中x=l时对x的一阶偏导,为w(x,t)中x=l时对x的二阶偏导, 为w(x,t)中x=l时对x的三阶偏导,为w(x,t)中x=l时对t的一阶偏导,为w(x,t)中x=l时对t的二阶偏导,为w(x,t)中x=0时对x的一阶偏导,w(x,0)为w(x,t)中t=0时的值,为w(x,t) 中t=0时对t的一阶偏导。4.根据权利要求1所述的针对模型不确定的海洋柔性立管边界振动控制方法,其特征在于,基于自适应模糊反演算法,建立柔性立管系统的自适应模糊反演控制律的方法包括:建立自适应模糊逻辑系统φ2:
;式中,为模糊基向量的转置,θ2为逼近向量;确定边界控制律:式中,u(t)为作用在立管顶端的边界控制量,λ2为第一控制参数,e1为海洋柔性立管边界实际位置与边界理想位置的误差,e2为海洋柔性立管边界横向振动偏移量变化率与虚拟控制信号之间的误差,x2为海洋柔性立管边界横向振动偏移量变化率,y为海洋柔性立管边界实际位置,y
d
为立管理想位置,α
11
为虚拟控制信号;根据所述边界控制律,确定自适应律:式中,为自适应参数,r2为第二控制参数,k2为第三控制参数,为模糊基向量,θ2为逼近向量。5.根据权利要求4所述的针对模型不确定的海洋柔性立管边界振动控制方法,其特征在于,所述自适应模糊逻辑系统在其模糊隶属函数的论域两端采用z形隶属函数,在论域中间区域采用三角形隶属函数。6.根据权利要求4所述的针对模型不确定的海洋柔性立管边界振动控制方法,其特征在于,在建立所述自适应模糊反演控制律后,还通过李雅普诺夫稳定性理论,验证系统是否稳定有界:若是,进入下一步;若否,重新调整第一控制参数和/或第二控制参数和/或第三控制参数。7.根据权利要求6所述的针对模型不确定的海洋柔性立管边界振动控制方法,其特征在于,验证系统是否稳定有界的方法包括:对于整个柔性立管系统,设计李雅普诺夫函数;确定李雅普诺夫函数的上下界;根据李雅普诺夫函数对时间的导数得到如下不等式:若满足该不等式,认为系统稳定有界;若不满足该不等式,认为系统不是稳定有界:;式中,t为时间变量、x为空间变量,w(x,t)为立管横向振动偏移量,l为立管长度,t为立管张力,υ、υ1均为大于0的常量,ε0为有界干扰。8.根据权利要求1所述的针对模型不确定的海洋柔性立管边界振动控制方法,其特征在于,所述柔性立管的横向振动实际偏移量通过激光位移传感器实时获取。9.根据权利要求1所述的针对模型不确定的海洋柔性立管边界振动控制方法,其特征在于,在顶端对柔性立管进行控制的方法为:根据实际控制输出,驱动位于柔性立管顶端的执行器,由所述执行器向柔性立管施加控制作用力。
10.根据权利要求3所述的针对模型不确定的海洋柔性立管边界振动控制方法,其特征在于,作用在立管上的分布式海流载荷f(x,t)通过如下公式表达:;式中,ρ
s
为海水密度,c
d
为阻力系数,d为立管外径,a
d
为阻力的振荡部分幅值,f
v
为涡旋脱落频率,u(x,t)为海洋洋流速度与深度关系,θ为分布式海流的相位角。
技术总结
本发明公开了针对模型不确定的海洋柔性立管边界振动控制方法,对柔性立管建模、得到柔性立管系统的控制方程,确定柔性立管系统的边界条件和初始条件;基于自适应模糊反演算法,建立柔性立管系统的自适应模糊反演控制律;获取柔性立管的横向振动实际偏移量;将所述实际偏移量代入所述自适应模糊反演控制律,得到实际控制输出;基于所述实际控制输出,在顶端对柔性立管进行控制。本发明用以解决现有技术中的控制方法依赖海洋柔性立管的精确数学模型所导致的控制精度较低的缺陷,实现不依赖精确模型,能够很好的补偿柔性立管系统的不确定性和外部荷载的不确定性,同时还能有效地跟踪和调节振动状况、主动抑制立管振动的目的。的。的。
技术研发人员:万敏 周莉 王国荣 王川 许海英 赵娜 张强 唐斌
受保护的技术使用者:西南石油大学
技术研发日:2022.04.11
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。