1.本发明涉及发光二极管检测领域,尤其涉及微米发光二极管检测系统及检测方法。
背景技术:
2.pl(photoluminescence 光致发光)是行业内最早实现产业化的检测方法,具有无损、高效等优点。但是市场上的各类pl检测设备,他们在检测pl光谱时不能实现单颗led分别测量,检测效果粗糙,只能检测整个观测视场fov的光谱,当出现缺陷时需要在更小fov下进一步复检,确定具体的缺陷led。即现有技术同时仅能检测一个led的光谱数据,检测效率较低。
技术实现要素:
3.本发明的主要目的在于提供一种微米发光二极管检测系统及检测方法,旨在解决现有pl检测设备检测效率较低的技术问题。
4.为实现上述目的,本发明提供一种微米发光二极管检测系统,所述系统包括:第一光发生模块,用于发出第一光信号至多个待测微米发光二极管,以使多个待测微米发光二极管生成第二光信号,其中,第一光信号为激光信号;高光谱相机,所述高光谱相机用于采集所述第二光信号,获得光谱成像帧,所述光谱成像帧中包括每个所述待测微米发光二极管的光谱数据;所述控制模块,与所述高光谱相机连接,用于基于所述光谱成像帧,从多个所述待测微米发光二极管中确定出缺陷微米发光二极管;其中,多个待测微米发光二极管,在接收到第一光信号中的光能后,激发自身以生成第二光信号。
5.可选地,所述系统还包括:置于所述高光谱相机与所述多个待测微米发光二极管之间的高倍显微物镜;所述高光谱相机,还用于采集通过所述高倍显微物镜的所述第二光信号,获得图像数据帧以及所述光谱成像帧,所述图像数据帧包括多个所述待测微米发光二极管的标识点信息;其中,所述标识点信息包括待测微米发光二极管的位置信息;所述控制模块,还用于基于所述图像数据帧,从多个所述待测微米发光二极管中确定出缺陷微米发光二极管以及所述缺陷微米发光二极管的位置信息。
6.可选地,所述系统还包括显微物镜以及与所述控制模块连接的电荷耦合器件相机:其中,所述电荷耦合器件相机,用于采集通过所述显微物镜的所述第二光信号,并基于所述第二光信号获得图像数据帧,所述图像数据帧包括多个所述待测微米发光二极管的标识点信息;其中,所述标识点信息包括待测微米发光二极管的位置信息;所述控制模块,还用于基于所述图像数据帧,从多个所述待测微米发光二极管中
确定出缺陷微米发光二极管以及所述缺陷微米发光二极管的位置信息。
7.可选地,所述系统还包括置于显微物镜与电荷耦合器件相机之间的第一半透半反镜;以及置于所述第一半透半反镜于所述高光谱相机之间的第二半透半反镜;所述第一光发生模块透过所述第一半透半反镜发射所述第一光束至多个所述待测微米发光二极管,以使多个所述待测微米发光二极管根据所述第一光束获取第一光信号,并生成第二光束;所述第二光束透过所述显微物镜发射至第一半透半反镜后,经过所述第一半透半反镜反射至第二半透半反镜,部分第二光束经过所述第二半透半反镜反射至所述电荷耦合器件相机,以使所述电荷耦合器件相机根据所述部分第二光束采集所述第二光信号,获得图像数据帧;剩余部分的第二光束自所述第二半透半反镜透射至所述高光谱相机,以使所述高光谱相机根据所述剩余部分的第二光束采集所述第二光信号,获得光谱成像帧。
8.可选地,所述系统还包括第二光发生模块,分别与所述控制模块连接的载物模块以及电荷耦合器件相机;其中,所述高光谱相机的空间分辨率接近所述待测微米发光二极管的尺寸;所述第二光发生模块,用于发出第三光信号至多个待测微米发光二极管;所述载物模块,用于放置所述多个所述待测微米发光二极管,并在第一位置和第二位置之间可移动;在所述第一位置处,多个待测微米发光二极管接收到所述第一光信号并生成第二光信号;所述电荷耦合器件相机采集所述第二光信号,并基于所述第二光信号获得图像数据帧;所述控制模块,还用于在接收到所述图像数据帧后,发送控制指令至所述载物模块,以使所述载物模块从第一位置移动至第二位置;在所述第二位置处,多个待测微米发光二极管接收到所述第三光信号并生成第四光信号;所述高光谱相机,所述高光谱相机用于采集所述第四光信号,获得光谱成像帧,所述光谱成像帧中包括多个所述待测微米发光二极管的光谱数据;所述控制模块,还用于基于所述图像数据帧以及所述光谱成像帧,从多个所述待测微米发光二极管中确定出缺陷微米发光二极管以及所述缺陷微米发光二极管的位置信息。
9.可选地,所述系统还包括置于所述载物模块与所述电荷耦合器件相机之间的第一半透半反镜;置于所述载物模块与所述电荷耦合器件相机之间的第二半透半反镜;在第一位置处,所述第一光发生模块通过所述第一半透半反镜反射第一光束至多个所述待测微米发光二极管,以使多个所述待测微米发光二极管生成第二光束;第二光束发射至第一半透半反镜,第二光束自所述第一半透半反镜透出至电荷耦合器件相机,以使所述电荷耦合器件相机采集所述第二光束,获得图像数据帧;在第二位置处,所述第二光发生模块通过第二半透半反镜反射第三光束至多个待
测微米发光二极管,以使多个待测微米发光二极管生成第四光束;第四光束发射至第二半透半反镜,第四光束自所述第二半透半反镜透出至高光谱相机,以使所述高光谱相机采集所述第四光束,获得光谱成像帧。
10.可选地,所述控制模块,具体用于:基于所述光谱成像帧,确定多个所述微米发光二极管的光谱数据对应的主波长值;通过分别比对多个所述主波长值与预设主波长值,确定多个所述微米发光二极管的主波长差值;基于所述图像数据帧,确定多个所述微米发光二极管的亮度值;通过分别比对多个所述亮度值与预设亮度值,确定多个所述微米发光二极管的亮度差值;基于所述图像数据帧,判断多个所述微米发光二极管是否存在外观缺陷;将满足所述主波长差值大于预设主波长阈值、所述亮度差值大于预设亮度阈值或存在外观缺陷中至少一项的待测微米发光二极管,确定所述缺陷微米发光二极管的标识点信息对应的位置信息。
11.此外,为实现上述目的,本发明还提供一种微米发光二极管检测方法,所述方法包括:利用高光谱相机获取光谱成像帧,所述光谱成像帧包括多个所述待测微米发光二极管的光谱数据;基于所述光谱成像帧,从多个所述待测微米发光二极管中确定出缺陷微米发光二极管。
12.可选地,所述利用高光谱相机获取光谱成像帧的步骤之后,所述方法还包括:利用电荷耦合器件相机获取图像数据帧,所述图像数据帧包括多个所述待测微米发光二极管的标识点信息,其中,所述标识点信息包括待测微米发光二极管的位置信息;所述基于所述光谱成像帧,从多个所述待测微米发光二极管中确定出缺陷微米发光二极管,并输出所述缺陷微米发光二极管给用户具体包括:基于所述光谱成像帧以及所述图像数据帧,从多个所述待测微米发光二极管中确定出缺陷微米发光二极管以及所述缺陷微米发光二极管的位置信息。
13.可选地,所述基于所述光谱成像帧以及所述图像数据帧,从多个所述待测微米发光二极管中确定出缺陷微米发光二极管,并输出所述缺陷微米发光二极管给用户的步骤,具体包括:基于所述光谱成像帧,确定多个所述微米发光二极管的光谱数据对应的主波长值;通过分别比对多个所述主波长值与预设主波长值,确定多个所述微米发光二极管的主波长差值;基于所述图像数据帧,确定多个所述微米发光二极管的亮度值;通过分别比对多个所述亮度值与预设亮度值,确定多个所述微米发光二极管的亮度差值;基于所述图像数据帧,判断多个所述微米发光二极管是否存在外观缺陷;
将满足所述主波长差值大于预设主波长阈值、所述亮度差值大于预设亮度阈值或存在外观缺陷中至少一项的待测微米发光二极管确定为缺陷微米发光二极管,并确定所述缺陷微米发光二极管的标识点信息对应的位置信息。
14.本发明实施例提出的一种微米发光二极管检测系统及检测方法,其中,系统包括第一光发生模块,用于发出第一光信号至多个待测微米发光二极管,以使多个待测微米发光二极管生成第二光信号;高光谱相机,所述高光谱相机用于采集所述第二光信号,获得光谱成像帧,所述光谱成像帧中包括多个所述待测微米发光二极管的光谱数据;所述控制模块,与所述高光谱相机连接,用于基于所述光谱成像帧,从多个所述待测微米发光二极管中确定出缺陷微米发光二极管。
15.由此,由于高光谱相机的分辨率可小于或接近微米发光二极管的尺寸,从而本发明通过高光谱相机可同时采集多个待测微米发光二极管的光信号,得到光谱成像帧,并对光谱成像帧中每个待测微米发光二极管的光谱数据进行分析,以实现同时准确对多个微米发光二极管进行检测,提高了在生产中对微米发光二极管的检测效率。
附图说明
16.图1为本发明微米发光二极管检测系统第一实施例结构示意图;图2为本发明微米发光二极管检测系统第二实施例结构示意图;图3为本发明光发生模块结构示意图;图4为本发明微米发光二极管检测系统第三实施例结构示意图;图5为本发明微米发光二极管检测系统第四实施例结构示意图;图6为本发明微米发光二极管检测方法第一实施例流程示意图。
17.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
18.应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
19.本发明实施例的主要解决方案是:通过微米发光二极管检测系统,其中系统包括第一光发生模块,用于发出第一光信号至多个待测微米发光二极管,以使多个待测微米发光二极管生成第二光信号;高光谱相机,所述高光谱相机用于采集所述第二光信号,获得光谱成像帧,所述光谱成像帧中包括多个所述待测微米发光二极管的光谱数据;所述控制模块,与所述高光谱相机连接,用于基于所述光谱成像帧,从多个所述待测微米发光二极管中确定出缺陷微米发光二极管。
20.现有micro-led(微米发光二极管)技术尚不成熟,最大的瓶颈在成本和良率,这也是影响micro-led显示技术大规模商用化的最大因素。良率的计算是建立在稳定可靠的检测技术上的,没有高重复性的检测设备,计算良率是没有意义的。所以巨量检测技术同样需要得到行业的重视和关注。micro led应用产品所使用的晶片数量甚多,并且micro led模组的光性及电性须正确且快速的判定之下,必须以巨量检测的方式才能减少检测时间及成本,要如何快速且准确的测试出良品是制程的一大问题,也是现阶段micro led检测技术瓶颈的主要原因之一。而pl(photoluminescence 光致发光)是行业内最早实现产业化的检测方法,具有无损、高效等优点。但是市场上的各类pl检测设备,他们在检测pl光谱时不能实
现单颗led分别测量,检测效果粗糙,只能检测整个fov(观测视场)的光谱,当出现缺陷时需要在更小fov下进一步复检,确定具体的缺陷led;该方法本质上同时仅能检测一个led的光谱数据,检测速度较慢。
21.本发明提供一种解决方案,由于高光谱相机的分辨率可小于或接近微米发光二极管的尺寸,从而本发明通过高光谱相机可同时采集多个待测微米发光二极管的光信号,得到光谱成像帧,并对光谱成像帧中每个待测微米发光二极管的光谱数据进行分析,以实现同时准确对多个微米发光二极管进行检测,提高了在生产中对微米发光二极管的检测效率。
22.参照图1,图1为本发明微米发光二极管检测系统第一实施例结构示意图,所述系统包括:第一光发生模块11,高光谱相机31以及所述控制模块41。
23.其中,第一光发生模块11用于发出第一光信号至多个待测微米发光二极管21,以使多个待测微米发光二极管生成第二光信号;其中,所述多个待测微米发光二极管,在接收到第一光信号中的光能后,激发自身生成第二光信号。
24.第一光发生模块可包括激光发射器,第一光信号可为激光信号。
25.进一步地,第一光发生模块将第一光信号发送至待测微米发光二极管21上,待测微米发光二极管21获取其中的光能,从而生成并发射出第二光信号。
26.所述高光谱相机31用于采集所述第二光信号,获得光谱成像帧,所述光谱成像帧中包括多个所述待测微米发光二极管21的光谱数据;其中,高光谱相机31利用相机成像原理,将光信号转换为光谱成像帧,可以理解,由于高光谱相机31的分辨率小于或接近于微米发光二极管21的尺寸,光谱成像帧中可包括多个所述待测微米发光二极管21的光谱数据。
27.所述控制模块41与所述高光谱相机31连接,用于基于所述光谱成像帧,从多个所述待测微米发光二极管21中确定出缺陷微米发光二极管。
28.其中,控制模块可为具有数据处理功能的设备,例如,计算机,笔记本电脑等。
29.具体地,控制模块41可通过以下检测方法确定出缺陷微米发光二极管:控制模块可基于所述光谱成像帧,获取多个所述待测微米发光二极管21的光谱数据,可对每个待测微米发光二极管21的光谱数据进行积分换算,得到该待测微米发光二极管21的亮度值,并将该微米发光二极管21的亮度值与预设亮度值比较得到亮度差,判断亮度差是否在预设范围内,若不在预设范围内,则将该待测微米发光二极管21标记为缺陷微米发光二极管;若在预设范围内,可利用卷积神经网络模型判断每个待测微米发光二极管21的光谱数据是否异常,若异常,则将该待测微米发光二极管21标记为缺陷微米发光二极管。
30.在本实施例中,通过微米发光二极管检测系统,该系统包括第一光发生模块,用于发出第一光信号至多个待测微米发光二极管,以使多个待测微米发光二极管生成第二光信号;所述高光谱相机用于采集所述第二光信号,获得光谱成像帧,所述光谱成像帧中包括多个所述待测微米发光二极管的光谱数据;所述控制模块,与所述高光谱相机连接,用于基于所述光谱成像帧,从多个所述待测微米发光二极管中确定出缺陷微米发光二极管。
31.由此,由于高光谱相机的分辨率可小于或接近微米发光二极管的尺寸,从而本发明通过高光谱相机可同时采集多个待测微米发光二极管的光信号,得到光谱成像帧,并对
光谱成像帧中每个待测微米发光二极管的光谱数据进行分析,以实现同时准确对多个微米发光二极管进行检测,提高了在生产中对微米发光二极管的检测效率。
32.基于上述实施例,由于微米发光二极管的缺陷不仅包括,光谱异常以及亮度异常。还可能包括外观上的缺陷,而仅凭光谱数据无法判断外观上的缺陷。故而,参照图2,图2为本发明微米发光二极管检测系统第二实施例结构示意图。
33.在本实施例中,所述系统还包括:置于所述高光谱相机31与所述多个待测微米发光二极管21之间的高倍显微物镜51;进一步地,参照图3,图3为本发明光发生模块结构示意图,其中,第一光发生模块11可包括:第一激光发射器111。
34.可以理解,由于激光发射器发出的光通常具有发散角,为了汇聚光信号,以实现汇聚光能,可在激光发射器的发射口前头耦合一个第一聚光透镜112。
35.需要说明的是,在光信号通过第一聚光透镜112后,产生的光斑会小于fov,为了使fov内所有待测微米发光二极管21都可获取到第一光信号,在满足光能的前提下,可在所述聚光透镜后耦合安置一个第一扩束镜113,从而使fov内所有待测微米发光二极管21获取到第一光信号。
36.其中,高倍显微物镜51可用于放大微米发光二极管的图像尺寸,以保证高光谱相机31在分辨率不足的情况下,依然可以采集到较为清晰的微米发光二极管的图像数据帧。
37.所述高光谱相机31,还用于采集通过所述高倍显微物镜51的所述第二光信号,获得图像数据帧以及所述光谱成像帧,所述图像数据帧包括多个所述待测微米发光二极管21的标识点信息;其中,所述标识点信息包括待测微米发光二极管21的位置信息;可以理解,高光谱相机31也具有采集图像数据的功能,但是由于高光谱相机31的分辨率不足,导致实际采集的图像数据不够清晰,作为一种可选实施例,可在所述高光谱相机31与所述多个待测微米发光二极管之间放置一个高倍显微物镜51。从而使高光谱相机31可以采集到清晰的待测微米发光二极管21的图片数据。
38.进一步地,在待测微米发光二极管21上存在标识点,用以校正待测微米发光二极管的光谱数据以及确定该待测微米发光二极管的位置信息。
39.所述控制模块41,还用于基于所述图像数据帧,从多个所述待测微米发光二极管21中确定出缺陷微米发光二极管以及所述缺陷微米发光二极管的位置信息。
40.具体地,在本实施例中,作为一种可选实施方式,控制模块41可使用下述检测方法对待测微米发光二极管进行检测,以确定出缺陷微米发光二极管:控制模块41可基于标识点对光谱成像帧中的光谱数据进行校正。
41.可以理解,微米发光二极管在不同朝向下发出的光谱数据会有所区别,为了使检测结果更准确,具体地,控制模块41通过识别待测微米发光二极管上的标识点,确定当前待测微米发光二极管的朝向,并将待测微米发光二极管在该朝向下的光谱数据调整为对应的标准朝向的光谱数据,该标准朝向的光谱数据即为校正后待测微米发光二极管21的光谱数据。
42.在完成对光谱数据的校正操作后,作为一种可选实施方式,控制模块41基于校正后微米发光二极管的光谱数据确定多个所述微米发光二极管21对应的光谱的主波长值;控
制模块通过分别比对多个所述主波长值与预设主波长值,确定多个所述待测微米发光二极管21的主波长差值。然后,控制模块基于所述图像数据帧,确定多个所述待测微米发光二极管21的亮度值。
43.具体地,控制模块利用像素的亮度响应值对图像数据帧进行计算,得到不同的待测微米发光二极管21的亮度值。
44.再然后,控制模块可分别将多个所述亮度值与预设亮度值进行对比,确定多个所述待测微米发光二极管21的亮度差值;利用机器视觉缺陷识别算法对图像数据帧进行识别,确定每个待测微米发光二极管21是否存在外观缺陷;最后,将满足所述主波长差值大于预设主波长阈值、所述亮度差值大于预设亮度阈值对应或存在外观缺陷中至少一项的待测微米发光二极管21标记为缺陷微米发光二极管,确定所述缺陷微米发光二极管的标识点信息对应的位置信息。
45.在现有光谱检测方法中,还可根据光谱数据确定对应波峰波长,并根据波峰波长确定微米发光二极管是否存在缺陷,作为另一种可选实施方式,控制模块41基于校正后微米发光二极管的光谱数据确定多个所述微米发光二极管21对应的光谱的波峰波长值;控制模块通过分别比对多个所述波峰波长值与预设波峰波长值,确定多个所述待测微米发光二极管21的波峰波长差值。然后,控制模块基于所述图像数据帧,确定多个所述待测微米发光二极管21的亮度值。
46.具体地,控制模块利用像素的亮度响应值对图像数据帧进行计算,得到不同的待测微米发光二极管21的亮度值。
47.再然后,控制模块可分别将多个所述亮度值与预设亮度值进行对比,确定多个所述待测微米发光二极管21的亮度差值;利用机器视觉缺陷识别算法对图像数据帧进行识别,确定每个待测微米发光二极管21是否存在外观缺陷;最后,将满足所述波峰波长差值大于预设波峰波长阈值、所述亮度差值大于预设亮度阈值对应或存在外观缺陷中至少一项的待测微米发光二极管21标记为缺陷微米发光二极管,确定所述缺陷微米发光二极管的标识点信息对应的位置信息。
48.需要说明的是,上述判断方法需要同时比较主波长或波峰波长差值以及亮度差值,然而,同时比对主波长或波峰波长差值以及亮度差值需要的工作量较大。
49.因此,作为另一种可选实施方式,控制模块41可使用下述检测方法对待测微米发光二极管进行检测,以确定出缺陷微米发光二极管:控制模块41可对图像数据帧中多个待测微米发光二极管21的图像数据利用像素的亮度响应值算出不同待测微米发光二极管21的亮度值,并根据该待测微米发光二极管21的亮度值与预设亮度值比较得到亮度差,判断亮度差是否在预设范围内。
50.若不在预设范围内,则将该待测微米发光二极管21标记为缺陷微米发光二极管;进一步地,若在预设范围内,则可利用机器视觉缺陷识别算法对图像数据帧进行识别,确定每个待测微米发光二极管21是否存在外观缺陷;若存在外观缺陷,则将该待测微米发光二极管21标记为缺陷微米发光二极管;更进一步地,若不存在外观缺陷,则可根据光谱成像帧确定每个待测微米发光二极管21的光谱数据,并利用卷积神经网络算法确定该待测微米发光二极管21的pl光谱是否异常;若异常,则将该待测微米发光二极管21标记为缺陷微米发光二极管;根据标识点信
息,确定出该标识点对应的缺陷微米发光二极管的位置信息。
51.在本实施例中,通过利用高光谱相机31采集待测微米发光二极管21的图像数据,进一步对待测微米发光二极管的亮度缺陷以及外观缺陷进行判断,从而,可以从更多维度对微米发光二极管进行判断,从而提高了对缺陷微米发光二极管的判断准确性。
52.进一步地,该检测系统还包括,位于所述高倍显微物镜与高光谱相机之间的第一半透半反镜71。
53.基于上述实施例,基于图2提出本技术的一个具体实施方式:在系统启动后,第一激光发射器111向待测微米发光二极管发出激光,激光经第一聚光透镜112汇聚,经过第一扩束镜(图中未示出)扩束后发射至第一半透半反镜71,第一半透半反镜71将部分激光反射至待测微米发光二极管21,待测微米发光二极管21吸收激光内的光能后自身开始发光,待测微米发光二极管的光线通过高倍显微物镜并透过第一半透半反镜71发射至高光谱相机31,此时高光谱相机31采集多个待测微米发光二极管21的光谱数据以及图像数据,控制模块41利用像素的亮度响应值确定对图像数据进行处理,得到待测微米发光二极管的发光强度,并将多个所述亮度值与预设亮度值进行对比得到亮度差,并判断所述亮度差值是否大于预设亮度阈值,例如,第一待测微米发光二极管的亮度值为11cd,第二待测微米发光二极管的亮度值为12cd,预设亮度值为10cd,此时,第一待测微米发光二极管亮度差为1cd,第二待测微米发光二极管亮度差为2cd,预设范围为-1cd到1cd,此时,第二微米待测发光二极管的亮度差超过预设范围,则标记第二待测微米发光二极管为缺陷微米发光二极管。此时,对第一待测微米发光二极管的图像数据利用机器视觉缺陷识别算法进行分析,确定是否存在外观缺陷,若不存在外观缺陷,则利用图像数据中的标记点对光谱成像帧中的光谱数据进行校正,之后对校正后的待测微米发光二极管的光谱数据进行寻峰处理,得到待测微米发光二极管的光谱对应的主波长,分别比对多个所述主波长值与预设主波长值,确定多个所述待测微米发光二极管21的主波长差值,并判断所述主波长差值是否大于预设主波长阈值,例如,第一待测微米发光二极管的光谱数据的主波长为452nm预设主波长为450nm,预设范围为
±
1nm,此时,第一待测微米发光二极管与预设主波长的主波长差为2nm,不在预设范围内,此时,将第一待测微米发光二极管标记为缺陷发光二极管。
54.在上述实施例二的基础上,由于现有的高光谱相机31的像素一般线阵为1000左右,而使用高倍显微物镜51,观测视场会变的较小,导致检测的微米发光二极管数量变少,为避免该情况,基于上述实施例一,提出本发明微米发光二极管检测系统第三实施例,作为一种可选实施例,参见图4,图4为本发明微米发光二极管检测系统第三实施例结构示意图。
55.在本实施例中,所述系统还包括显微物镜52以及与所述控制模块41连接的电荷耦合器件相机32:其中,所述电荷耦合器件相机32,用于采集通过所述显微物镜52的所述第二光信号,并基于所述第二光信号获得图像数据帧,所述图像数据帧包括多个所述待测微米发光二极管的标识点信息;可以理解,电荷耦合器件相机32可具有很高的分辨率,利用电荷耦合器件相机32可以获得满足要求的待测微米发光二极管21的图像数据帧。
56.所述标识点信息包括待测微米发光二极管的位置信息。
57.可以理解,由于显微物镜52的放大倍数较低,可以使高光谱相机31采集到更多待
测微米发光二极管21的光谱数据。但是由于高光谱相机31的分辨率较低,导致高光谱相机31采集到的图像数据清晰度不够,在本实施例中,利用电荷耦合器件相机32(ccd相机),采集待测微米发光二极管21的图像数据帧。在保证检测精度的基础上,可以提高检测效率。
58.所述控制模块41,还用于基于所述图像数据帧,从多个所述待测微米发光二极管21中确定出缺陷微米发光二极管以及所述缺陷微米发光二极管的位置信息。
59.具体地,在本实施例中,作为一种可选实施方式,控制模块41可使用下述检测方法对待测微米发光二极管进行检测,以确定出缺陷微米发光二极管:控制模块41可基于标识点对光谱成像帧中的光谱数据进行校正。
60.可以理解,微米发光二极管在不同朝向下发出的光谱数据会有所区别,为了使检测结果更准确,具体地,控制模块41通过识别微米发光二极管上的标识点,确定当前待测微米发光二极管的朝向,并将微米发光二极管在该朝向下的光谱数据调整为对应的标准朝向的光谱数据,该标准朝向的光谱数据即为校正后待测微米发光二极管21的光谱数据。
61.在完成对光谱数据的校正操作后,控制模块41基于校正后微米发光二极管的光谱数据确定多个所述微米发光二极管对应的光谱的主波长值;控制模块通过分别比对多个所述主波长值与预设主波长值,确定多个所述待测微米发光二极管21的主波长差值。
62.然后,控制模块基于所述图像数据帧,确定多个所述待测微米发光二极管21的亮度值。
63.具体地,控制模块利用像素的亮度响应值对图像数据帧进行计算,得到不同的待测微米发光二极管21的亮度值。
64.再然后,控制模块可通过分别比对多个所述亮度值与预设亮度值,确定多个所述待测微米发光二极管21的亮度差值;利用机器视觉缺陷识别算法对图像数据帧进行识别,确定每个待测微米发光二极管21是否存在外观缺陷;最后,将满足所述主波长差值大于预设主波长阈值、所述亮度差值大于预设亮度阈值对应或存在外观缺陷中至少一项的待测微米发光二极管21标记为缺陷微米发光二极管,确定所述缺陷微米发光二极管的标识点信息对应的位置信息。
65.需要说明的是,上述判断方法需要同时比较主波长差值以及亮度差值,然而,同时比对主波长差值以及亮度差值需要的工作量较大。
66.因此,作为另一种可选实施方式,控制模块41可使用下述检测方法对待测微米发光二极管进行检测,以确定出缺陷微米发光二极管:控制模块41可对图像数据帧中多个待测微米发光二极管21的图像数据利用像素的亮度响应值算出不同待测微米发光二极管21的亮度值,并根据该待测微米发光二极管21的亮度值与预设亮度值比较得到亮度差,判断亮度差是否在预设范围内。
67.若不在预设范围内,则将该待测微米发光二极管21标记为缺陷微米发光二极管;进一步地,若在预设范围内,则可利用机器视觉缺陷识别算法对图像数据帧进行识别,确定每个待测微米发光二极管21是否存在外观缺陷;若存在外观缺陷,则将该待测微米发光二极管21标记为缺陷微米发光二极管;更进一步地,若不存在外观缺陷,则可根据光谱成像帧确定每个待测微米发光二极管21的光谱数据,并利用卷积神经网络算法确定该待测微米发光二极管21的pl光谱是否
异常;若异常,则将该待测微米发光二极管21标记为缺陷微米发光二极管;根据标识点信息,确定出该标识点对应的缺陷微米发光二极管的位置信息。
68.在本实施例中,所述系统还包括置于显微物镜52与电荷耦合器件相机32之间的第一半透半反镜71;以及置于所述第一半透半反镜于所述高光谱相机31之间的第二半透半反镜72;所述第一光发生模块11透过所述第一半透半反镜发射所述第一光束至多个所述待测微米发光二极管21,以使多个所述待测微米发光二极管21生成第二光束;所述第二光束透过所述显微物镜52发射至第一半透半反镜71后,经过所述第一半透半反镜71反射至第二半透半反镜72,部分第二光束经过所述第二半透半反镜72反射至所述电荷耦合器件相机32,以使所述电荷耦合器件相机32采集所述部分第二光束,获得图像数据帧;剩余部分的第二光束自所述第二半透半反镜72透射至所述高光谱相机31,以使所述高光谱相机31采集所述剩余部分的第二光束,获得光谱成像帧。
69.在本实施例中,可以利用电荷耦合器件相机采集微米发光二极管的图像数据,而电荷耦合器件相机可以不需要高倍显微物镜直接采集出清晰的微米发光二极管的图像数据,此时,仅需要放大后的微米发光二极管尺寸接近高光谱相机分辨率,即可完成对缺陷微米发光二极管的判断,因此,在本实施例中可将高倍显微物镜替换为显微物镜,可以理解,由于显微物镜放大倍数较小,故而,可以采集到更多的微米发光二极管光谱数据以及图像数据,进而可以提高采集效率。
70.基于上述实施例,基于图4提出一种具体实施方式:在系统启动后,第一激光发射器111发出激光经第一聚光透镜112汇聚,经过第一扩束镜(图中未示出)扩束后透过所述第一半透半反镜71发射所述第一光束至多个所述待测微米发光二极管21,待测微米发光二极管21吸收激光内的光能后自身开始发光,待测微米发光二极管21的光线通过显微物镜52并经第一半透半反镜71发射至第二半透半反镜72,部分第二光束经过所述第二半透半反镜72反射至所述电荷耦合器件相机32,以使所述电荷耦合器件相机32采集所述部分光线获得图像数据帧,剩余部分光线自第二半透半反镜72透射至所述高光谱相机31,以使所述高光谱相机31采集所述剩余部分的光线,控制模块41利用像素的亮度响应值确定对图像数据进行处理,得到待测微米发光二极管的发光强度,并将多个所述亮度值与预设亮度值进行对比得到亮度差,并判断所述亮度差值是否大于预设亮度阈值,例如,第一待测微米发光二极管的亮度值为11cd,第二待测微米发光二极管的亮度值为12cd,预设亮度值为10cd,此时,第一待测微米发光二极管亮度差为1cd,第二待测微米发光二极管亮度差为2cd,预设范围为-1cd到1cd,此时,第二微米待测发光二极管的亮度差超过预设范围,则标记第二待测微米发光二极管为缺陷微米发光二极管。此时,对第一待测微米发光二极管的图像数据利用机器视觉缺陷识别算法进行分析,确定是否存在外观缺陷,若不存在外观缺陷,则利用图像数据中的标记点对光谱成像帧中的光谱数据进行校正,之后对校正后的待测微米发光二极管的光谱数据进行寻峰处理,得到待测微米发光二极管的光谱对应的主波长,分别比对多个所述主波长值与预设主波长值,确定多个所述待测微米发光二极管21的主波长差值,并判断所述主波长差值是否大于预设主波长阈值,例如,第一待测微米发光二极管的光谱数据的主波长为452nm,预设主波长为450nm,预设范围为
±
1nm,此时,第一待测微米发光二极管与
预设主波长的主波长差为2nm,不在预设范围内,此时,将第一待测微米发光二极管标记为缺陷微米发光二极管,同时根据缺陷微米发光二极管的标识点信息,确定该缺陷微米发光二极管的位置信息。
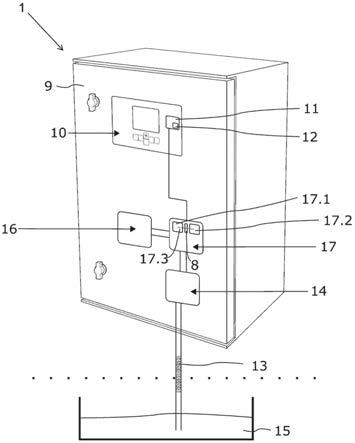
71.作为一种可选实施例,参见图5,图5为本发明微米发光二极管检测系统第四实施例结构示意图。
72.在本实施例中所述系统还包括第二光发生模块12,分别与所述控制模块41连接的载物模块以及电荷耦合器件相机32;其中,所述高光谱相机31的空间分辨率接近所述待测微米发光二极管21的尺寸;所述第二光发生模块12,用于发出第三光信号至多个待测微米发光二极管21;需要说明的是,第二光发生模块结构可参照上述第一光发生模块结构,此处不再赘述。
73.所述载物模块,用于放置所述多个所述待测微米发光二极管21,并在第一位置和第二位置之间可移动;在所述第一位置处,多个待测微米发光二极管21接收到所述第一光信号并生成第二光信号;可以理解,当高光谱相机31的空间分辨率接近微米发光二极管尺寸时,即可采集到准确的光谱数据,在本实施例中,分别采用两个不同的光发生模块,以提高图像数据的获取准确性以及光谱数据的获取准确性,从而实现对缺陷微米发光二极管的判断准确性。
74.需要说明的是,在本实施例中,第一光信号可为蓝光波段的光信号;所述电荷耦合器件相机32采集所述第二光信号,并基于所述第二光信号获得图像数据帧;所述控制模块41,还用于在接收到所述图像数据帧后,发送控制指令至所述载物模块,以使所述载物模块从第一位置移动至第二位置;在所述第二位置处,多个待测微米发光二极管21接收到所述第三光信号并生成第四光信号;在本实施例中,第三光信号可为正常的光致激发波段的光信号;所述高光谱相机31,所述高光谱相机31用于采集所述第四光信号,获得光谱成像帧,所述光谱成像帧中包括多个所述待测微米发光二极管21的光谱数据;具体地,作为一种可选实施方式,控制模块41可使用下述检测方法对待测微米发光二极管进行检测,以确定出缺陷微米发光二极管:在控制模块41接收到图像数据帧后可以先通过图像数据帧利用像素的亮度响应值算出不同待测微米发光二极管21的亮度值,并根据该待测微米发光二极管21的亮度值与预设亮度值比较得到亮度差,判断亮度差是否在预设范围内。若不在预设范围内,则将该待测微米发光二极管21标记为缺陷微米发光二极管;若在预设范围内,则可根据机器视觉缺陷识别算法对图像数据帧进行识别,确定每个待测微米发光二极管21是否存在外观缺陷。若存在外观缺陷,则将该待测微米发光二极管21标记为缺陷微米发光二极管;若不存在外观缺陷,则发送控制指令至所述载物模块,以使载物模块移动到第二位置处,控制模块41通过高光谱相机31采集光谱成像帧。
75.控制模块41可基于图像数据帧中标识点信息对光谱成像帧中的光谱数据进行校正。
76.可以理解,微米发光二极管在不同朝向下发出的光谱数据会有所区别,为了使检
测结果更准确,具体地,控制模块41通过识别微米发光二极管上的标识点,确定当前待测微米发光二极管的朝向,并将微米发光二极管在该朝向下的光谱数据调整为对应的标准朝向的光谱数据,该标准朝向的光谱数据即为校正后待测微米发光二极管21的光谱数据。
77.在完成对光谱数据的校正操作后,控制模块41基于校正后微米发光二极管的光谱数据确定多个所述微米发光二极管对应的光谱的主波长值;通过分别比对多个所述主波长值与预设主波长值,确定多个所述微米发光二极管的主波长差值;基于所述图像数据帧,确定多个所述微米发光二极管的亮度值;具体地,通过图像数据帧利用像素的亮度响应值算出不同待测微米发光二极管21的亮度值。
78.通过分别比对多个所述亮度值与预设亮度值,确定多个所述微米发光二极管的亮度差值;进一步地,可根据机器视觉缺陷识别算法对图像数据帧进行识别,确定每个待测微米发光二极管21是否存在外观缺陷;将满足所述主波长差值大于预设主波长阈值、所述亮度差值大于预设亮度阈值对应或存在外观缺陷中至少一项的待测微米发光二极管21标记为缺陷微米发光二极管,确定所述缺陷微米发光二极管的标识点信息对应的位置信息。
79.作为另一种可选实施方式,检测方法可包括:控制模块41在获取到图像数据帧后,发送控制指令至载物模块61,以使载物模块61移动至第二位置处,控制模块41通过高光谱相机31采集光谱成像帧。
80.控制模块41可基于标识点对光谱成像帧中的光谱数据进行校正,并基于校正后微米发光二极管的光谱数据确定多个所述微米发光二极管对应的光谱的主波长值;通过分别比对多个所述主波长值与预设主波长值,确定多个所述微米发光二极管的主波长差值;基于所述图像数据帧,确定多个所述微米发光二极管的亮度值;具体地,通过图像数据帧利用像素的亮度响应值算出不同待测微米发光二极管21的亮度值。
81.通过分别比对多个所述亮度值与预设亮度值,确定多个所述微米发光二极管的亮度差值;可根据机器视觉缺陷识别算法对图像数据帧进行识别,确定每个待测微米发光二极管21是否存在外观缺陷;将满足所述主波长差值大于预设主波长阈值、所述亮度差值大于预设亮度阈值对应或存在外观缺陷中至少一项的待测微米发光二极管21标记为缺陷微米发光二极管,确定所述缺陷微米发光二极管的标识点信息对应的位置信息。
82.需要说明的是,在本实施例中,所述系统还包括置于所述载物模块61与所述电荷耦合器件相机32之间的第一半透半反镜71;置于所述载物模块61与所述高光谱相机31之间的第二半透半反镜72;在第一位置处,所述第一光发生模块11通过所述第一半透半反镜反射第一光束至多个所述待测微米发光二极管21,以使多个所述待测微米发光二极管21生成第二光束;第二光束发射至第一半透半反镜,第二光束自所述第一半透半反镜透出至电荷耦
合器件相机32,以使所述电荷耦合器件相机32采集所述第二光束,获得图像数据帧;在第二位置处,所述第二光发生模块12通过第二半透半反镜72反射第三光束至多个待测微米发光二极管21,以使多个待测微米发光二极管21生成第四光束;第四光束发射至第二半透半反镜72,第四光束自所述第二半透半反镜72透出至高光谱相机31,以使所述高光谱相机31采集所述第四光束,获得光谱成像帧。
83.在本实施例中,利用可位移的载物模块61,在第一位置时,电荷耦合器件相机32仅采集到第二光信号,在第二位置时,高光谱相机31仅采集到第四光信号,从而确保电荷耦合器件相机以及高光谱相机31分别采集到不同光源下待测微米发光二极管21发出不同的光信号。
84.在本实施例中,可以将电荷耦合器件相机采集图像数据帧的光路与高光谱相机采集光谱成像帧的光路分开,此时,由于高光谱相机的分辨率与微米发光二极管的尺寸相近,因此不需要使用显微物镜对微米发光二极管的尺寸进行放大,而直接利用电荷耦合器件相机可以采集更多的微米发光二极管的清晰的图像数据,此时可以快速检测出更多的微米发光二极管是否存在亮度缺陷或外观缺陷,从而可以提高对缺陷微米发光二极管的检测效率。
85.基于上述实施例,基于图5提出一种具体实施方式:在系统启动后,第一激光发射器111发射激光经第一聚光透镜112汇聚,经过第一扩束镜113扩束后透过所述第一半透半反镜71反射所述第一光束至多个所述待测微米发光二极管21,待测微米发光二极管21吸收激光内的光能后自身开始发光以生成第二光束,第二光束经第一半透半反镜71透射至电荷耦合器件相机32,以使所述电荷耦合器件相机32采集所述第二光束获得图像数据帧获得图像数据帧,在获取到图像数据帧后,控制模块41发送控制指令至所述载物模块61,以使载物模块61移动到第二位置处,在第二位置处,第二激光发射器121发射激光经第二聚光透镜122汇聚,经过第二扩束镜123扩束后透过所述第二半透半反镜726反射所述第一光束至多个所述待测微米发光二极管21,以使多个待测微待测微米发光二极管21吸收激光内的光能后自身开始发光,以生成第四光束;第四光束发射至第二半透半反镜72,第四光束自所述第二半透半反镜72透出至高光谱相机31,以使高光谱相机31采集所述第四光束,获得光谱成像帧。控制模块41利用像素的亮度响应值确定对图像数据进行处理,得到待测微米发光二极管的发光强度,并将多个所述亮度值与预设亮度值进行对比得到亮度差,并判断所述亮度差值是否大于预设亮度阈值,例如,第一待测微米发光二极管的亮度值为11cd,第二待测微米发光二极管的亮度值为12cd,预设亮度值为10cd,此时,第一待测微米发光二极管亮度差为1cd,第二待测微米发光二极管亮度差为2cd,预设范围为-1cd到1cd,此时,第二微米待测发光二极管的亮度差超过预设范围,则标记第二待测微米发光二极管为缺陷微米发光二极管。此时,对第一待测微米发光二极管的图像数据利用机器视觉缺陷识别算法进行分析,确定是否存在外观缺陷,若不存在外观缺陷,则利用图像数据中的标记点对光谱成像帧中的光谱数据进行校正,之后对校正后的待测微米发光二极管的光谱数据进行寻峰处理,得到待测微米发光二极管的光谱对应的主波长,分别比对多个所述主波长值与预设主波长值,确定多个所述待测微米发光二极管21的主波长差值,并判断所述主波长差值是否大于预设主波长阈值,例如,第一待测微米发光二极管的光谱数据的主波长为452nm,预设主波长为450nm,预设范围为
±
1nm,此时,第一待测微米发光二极管与预设主波长的主波长差为
2nm,不在预设范围内,此时,将第一待测微米发光二极管标记为缺陷微米发光二极管,同时根据缺陷微米发光二极管的标识点信息,确定该缺陷微米发光二极管的位置信息。
86.此外,基于上述系统实施例,本发明还提供一种微米发光二极管检测方法,参照图6,图6为本发明微米发光二极管检测方法第一实施例流程示意图,在本实施例中,所述方法包括:步骤s10,利用高光谱相机获取光谱成像帧,所述光谱成像帧包括多个所述待测微米发光二极管的光谱数据;步骤s20,基于所述光谱成像帧,从多个待测微米发光二极管中确定出缺陷微米发光二极管。
87.该检测方法为上述系统实施例一中检测方法,具体实施方式可参照上述系统实施例,本实施例中不再赘述。
88.在本实施例中,利用高光谱相机获取光谱成像帧,所述光谱成像帧包括多个所述待测微米发光二极管的光谱数据;基于所述光谱成像帧,从多个所述待测微米发光二极管中确定出缺陷微米发光二极管。
89.由此,本发明通过高光谱相机,由于高光谱相机的分辨率可小于或接近微米发光二极管的尺寸,从而可同时采集多个待测微米发光二极管的光信号,得到光谱成像帧,其中,光谱成像帧包括多个待测微米发光二极管的光谱数据,并对光谱成像帧中每个待测微米发光二极管的光谱数据进行分析,以实现同时准确对多个微米发光二极管进行检测,提高了在生产中对微米发光二极管的检测效率。
90.基于上述微米发光二极管检测方法第一实施例,提出本发明微米发光二极管检测方法第二实施例,在本实施例中:步骤s10之后,所述方法还包括:步骤s11,利用电荷耦合器件相机获取图像数据帧,所述图像数据帧包括多个所述待测微米发光二极管的标识点信息,其中,所述标识点信息包括待测微米发光二极管的位置信息;步骤s20,具体包括:步骤s21,基于所述光谱成像帧以及所述图像数据帧,从多个所述待测微米发光二极管中确定出缺陷微米发光二极管以及所述缺陷微米发光二极管的位置信息。
91.基于上述微米发光二极管检测方法第二实施例,提出本发明微米发光二极管检测方法第三实施例,在本实施例中:步骤s21,具体包括:步骤s211,基于所述光谱成像帧,确定多个所述微米发光二极管的光谱数据对应的主波长值;步骤s212,通过分别比对多个所述主波长值与预设主波长值,确定多个所述微米发光二极管的主波长差值;步骤s213,基于所述图像数据帧,确定多个所述微米发光二极管的亮度值;步骤s214,通过分别比对多个所述亮度值与预设亮度值,确定多个所述微米发光二极管的亮度差值;步骤s215,将所述主波长差值大于预设主波长阈值和/或所述亮度差值大于预设
亮度阈值对应的待测微米发光二极管确定为缺陷微米发光二极管,并确定所述缺陷微米发光二极管的标识点信息对应的位置信息。
92.需要说明的是,该检测方法为上述系统实施例二中对应的检测方法,具体实施方式可参照上述系统实施例,本实施例中不再赘述。
93.以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。